Vigyázat
A minta kipróbálása előtt olvassa el és kövesse az óvintézkedéseket. További információkért lásd a 1. RÉSZT. Biztonsági kézikönyv.
Megjegyzés
-
Ha a megfelelőségi ellenőrzés engedélyezésekor vagy letiltásakor a küszöbérték feletti külső nyomaték van, a robot a JTS (Közös nyomatékérzékelő) hiba miatt leállítja a programot.
-
A merevség módosítása a külső nyomaték méretétől függetlenül végrehajtható.
-
A megfelelőség ellenőrzése során a közös mozgások, mint például a MoveJ parancs, nem hajthatók végre.
|
A JTS-hiba küszöbértéke (nm) |
||||||
|
Modell |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
|---|---|---|---|---|---|---|
|
M1013 |
25 |
25 |
25 |
15 |
15 |
15 |
|
M0617 |
30 |
30 |
30 |
15 |
15 |
15 |
|
M0609 |
18 |
18 |
15 |
15 |
15 |
15 |
|
M1509 |
18 |
18 |
15 |
15 |
15 |
15 |
|
H2515 |
40 |
50 |
40 |
15 |
15 |
15 |
|
H2017 |
40 |
50 |
40 |
15 |
15 |
15 |

-
Állítsa a szervo állapotot On (be) állásba.
-
Állítsa a működési módot Kézi üzemmódra.
-
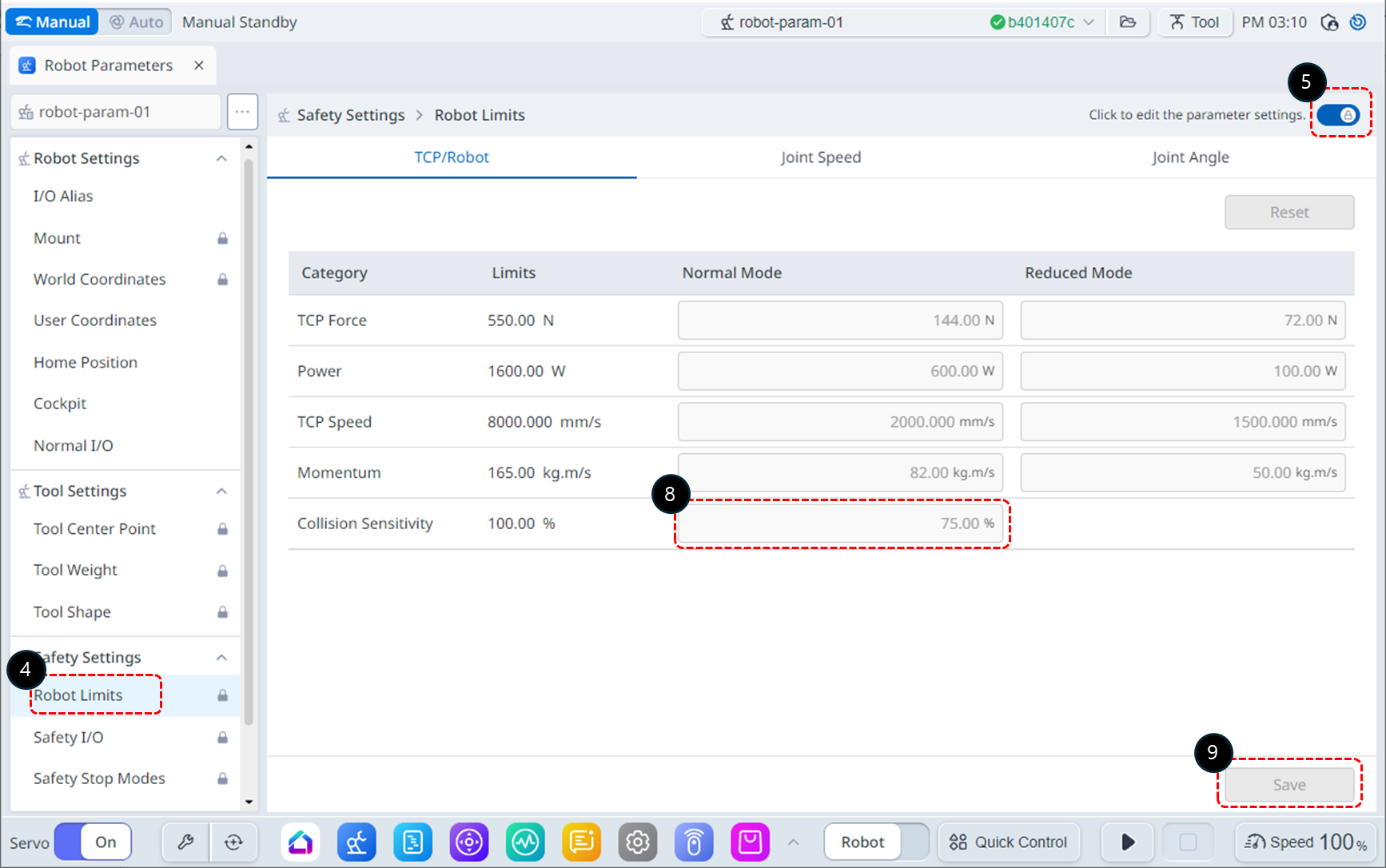
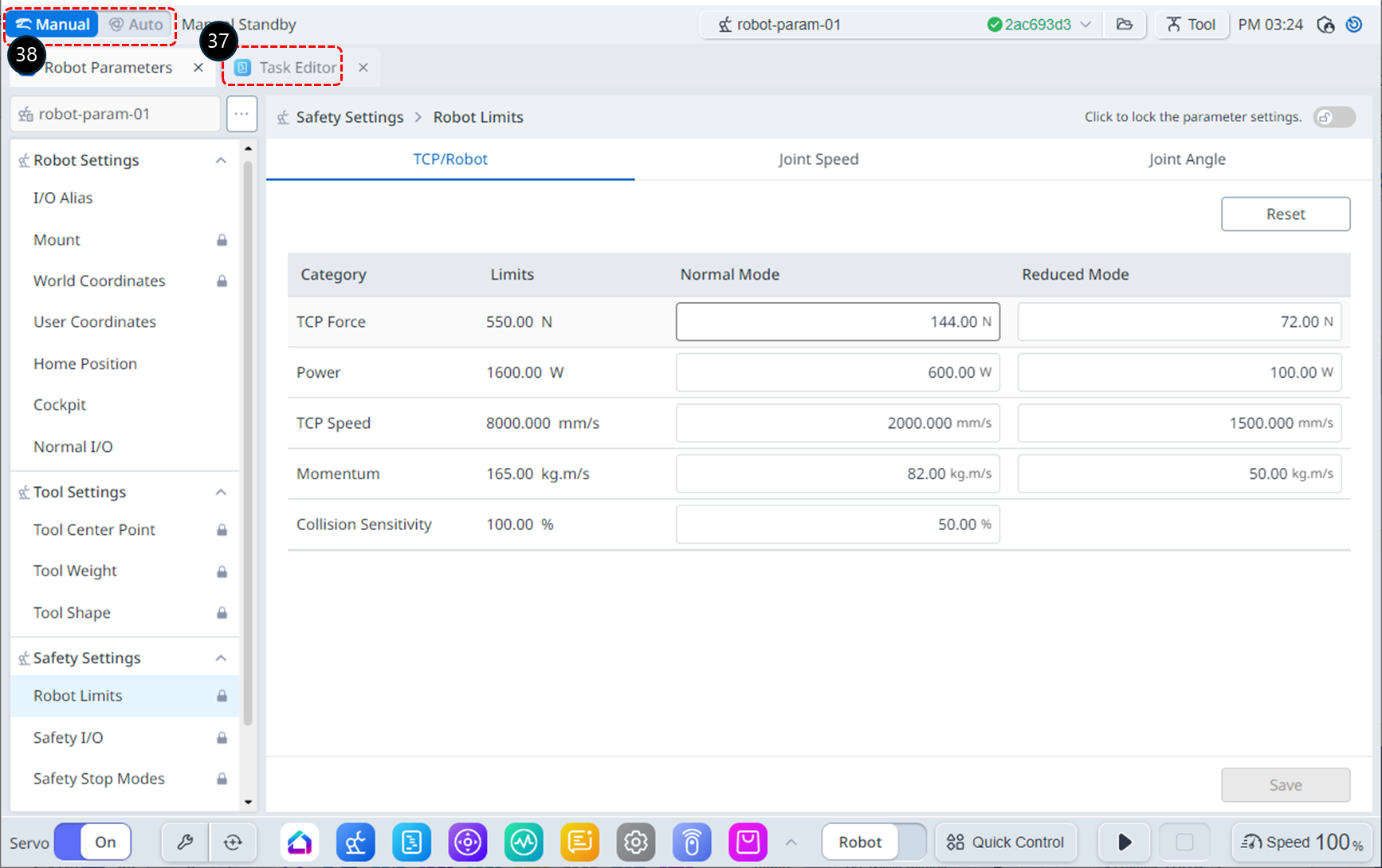
Válassza ki a Robot Parameters (Robot paraméterek) modult az alsó menüből. Ebben a példában a Collision Sensitivity (Ütközésérzékenység) 95%-ra van állítva, hogy megmagyarázza a Compliance Control (Megfelelőségellenőrzés) használatakor az Ütközésérzékenység csökkentésének okát.
-
Válassza ki a Robot Limits (Robot határértékek)
-
Engedélyezze a paraméter szerkesztési állapotát.
-
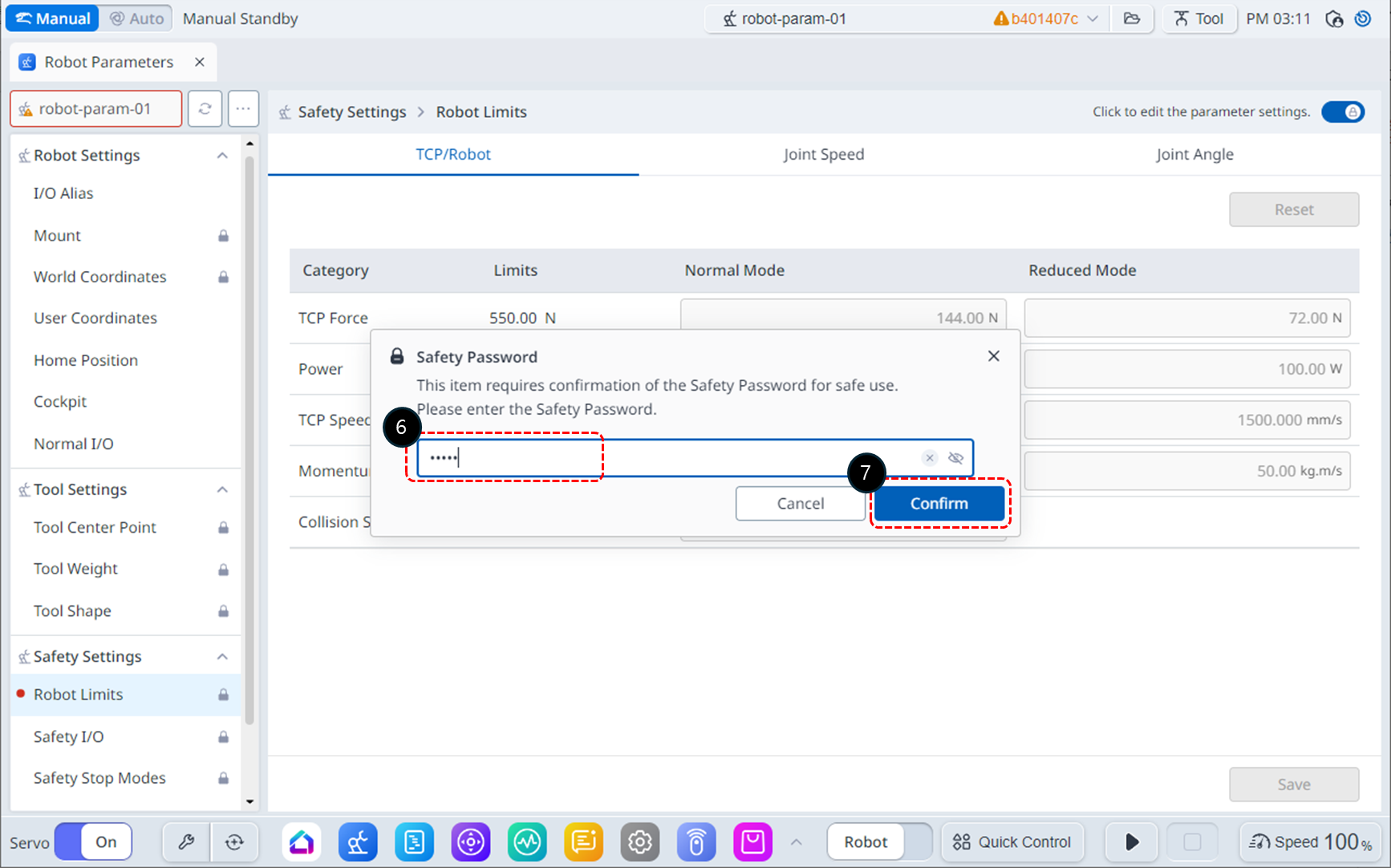
Ha megjelenik egy jelszó beviteli ablak, adja meg a Biztonsági jelszót (alapértelmezett biztonsági jelszó: Admin).
-
Kattintson a Megerősítés gombra.
-
Módosítsa az ütközési érzékenységet 95%-ra.
-
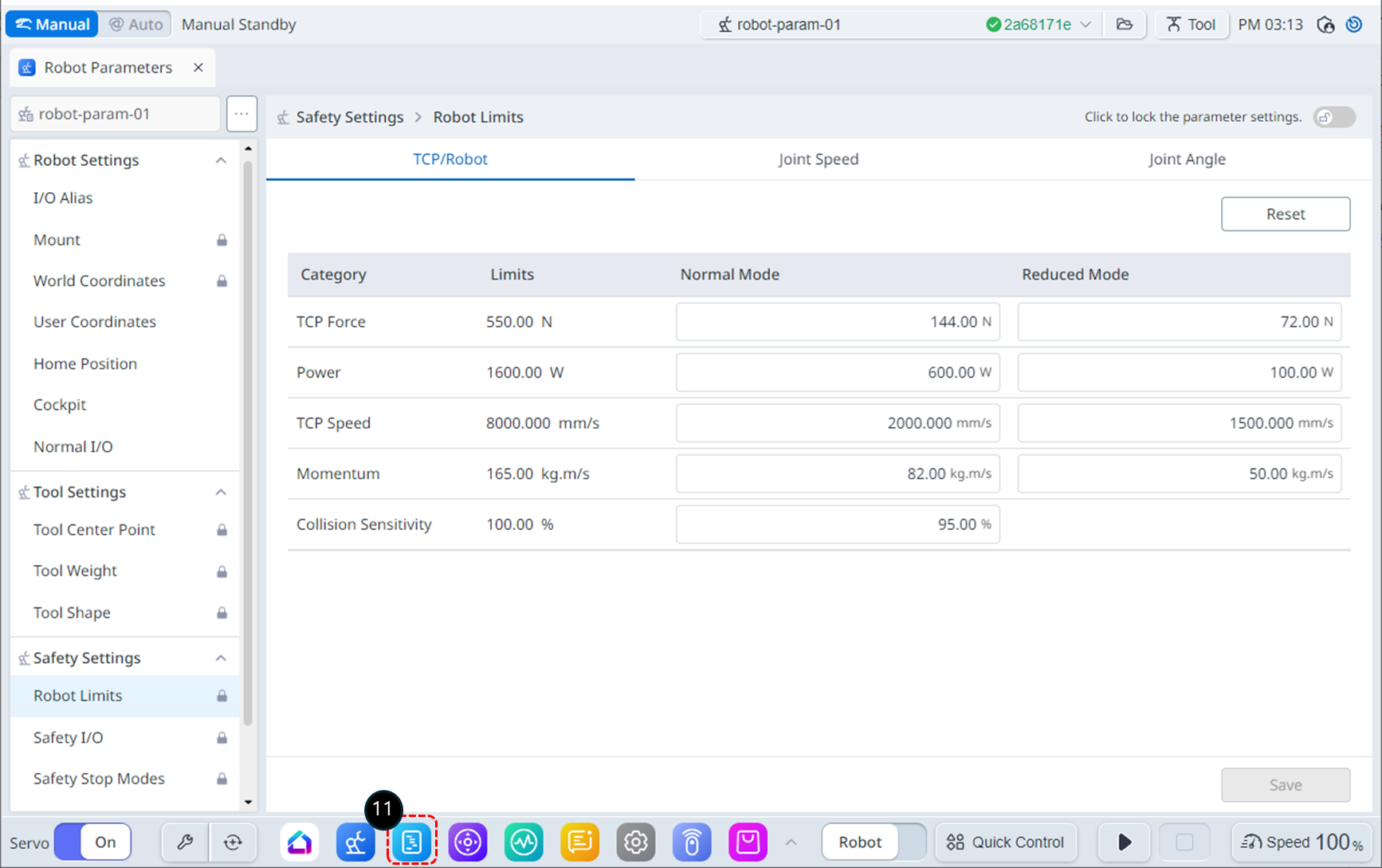
A beállítások mentéséhez kattintson a Mentés gombra.
-
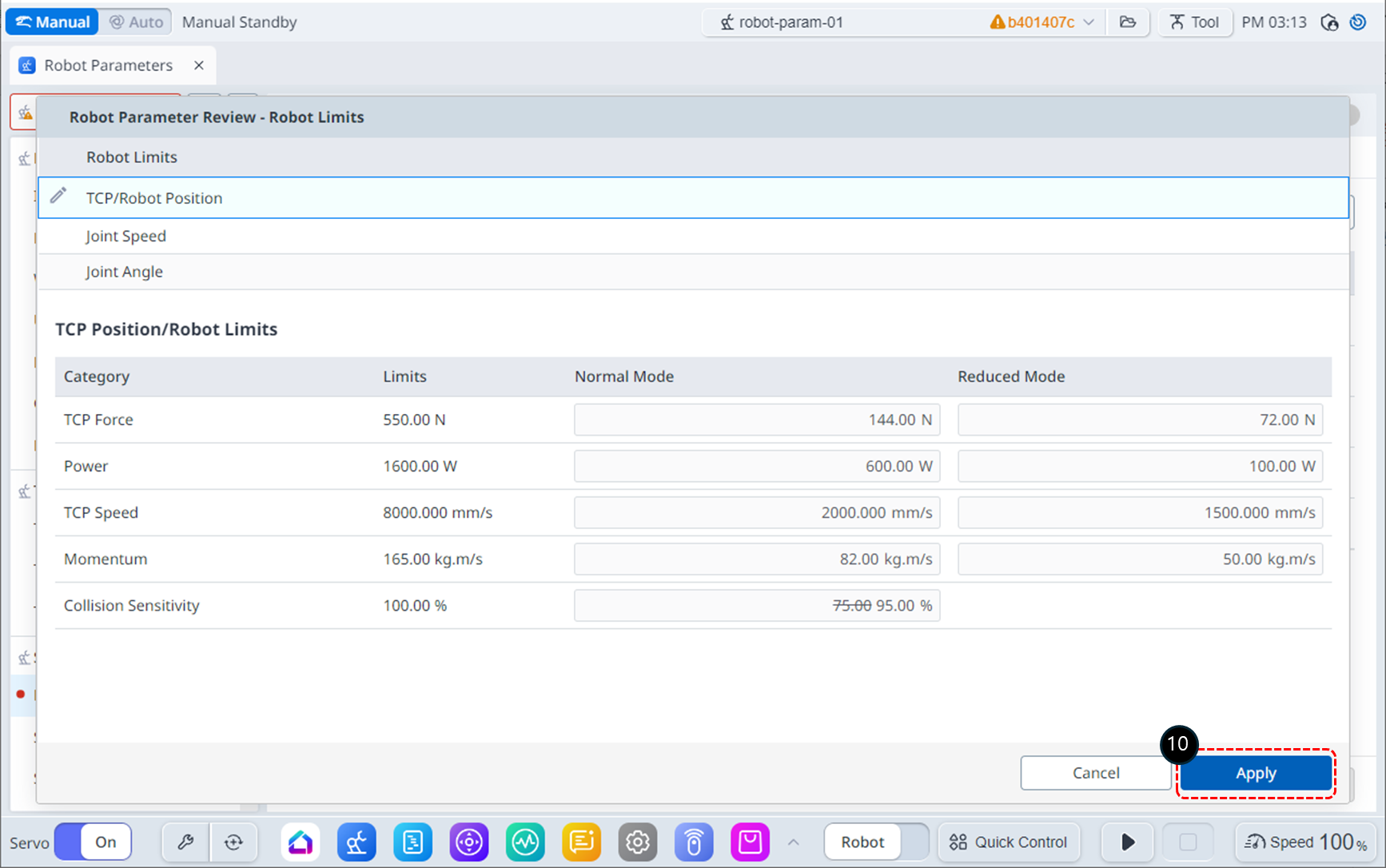
A módosítások áttekintése után kattintson az alkalmaz gombra.
-
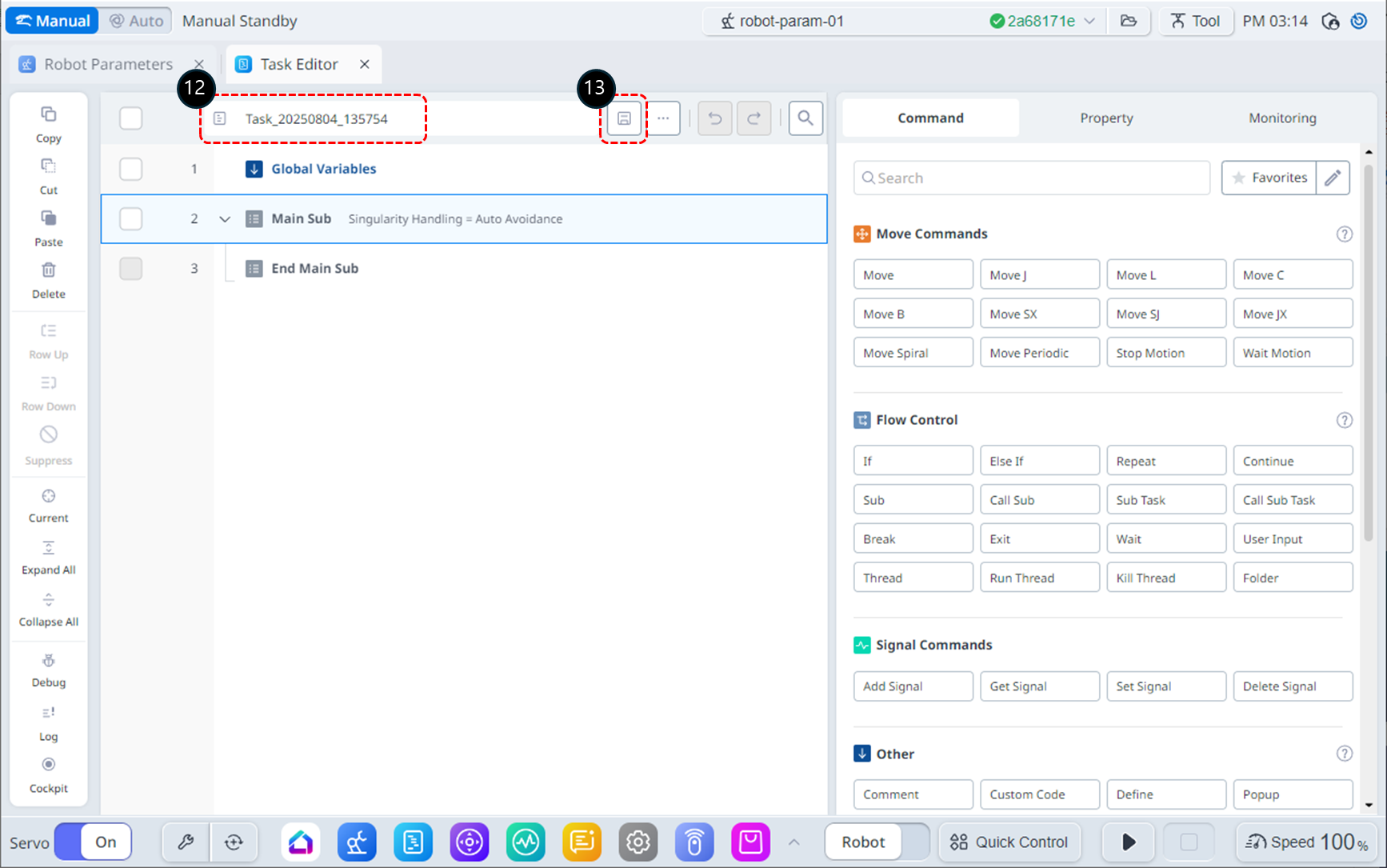
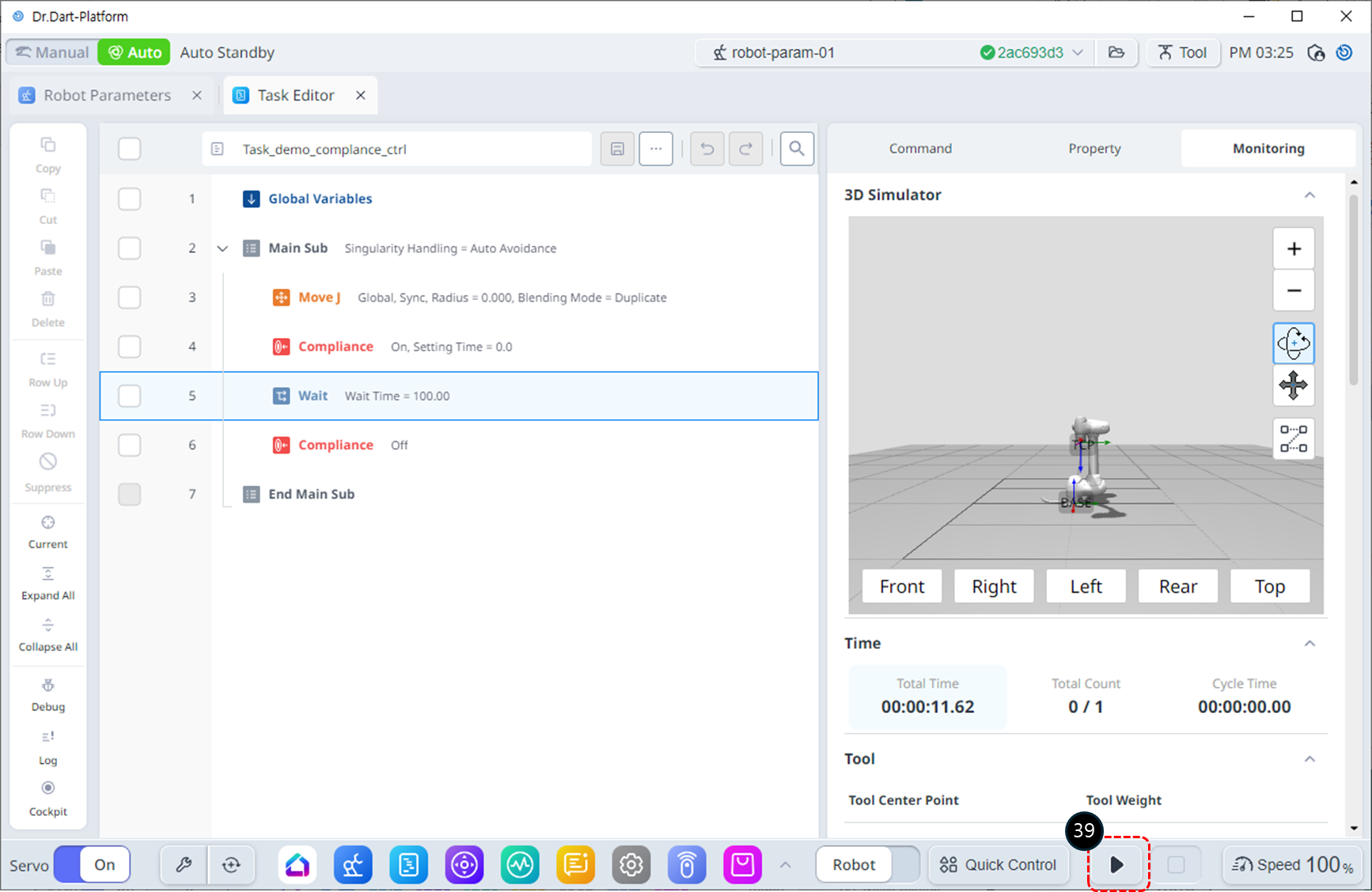
Válassza ki a Feladatszerkesztő modult az alsó menüből.
-
Nevezze át a feladatot Task_demo_Compliance_ctrl-re.
-
Mentse a frissített feladat nevét.
-
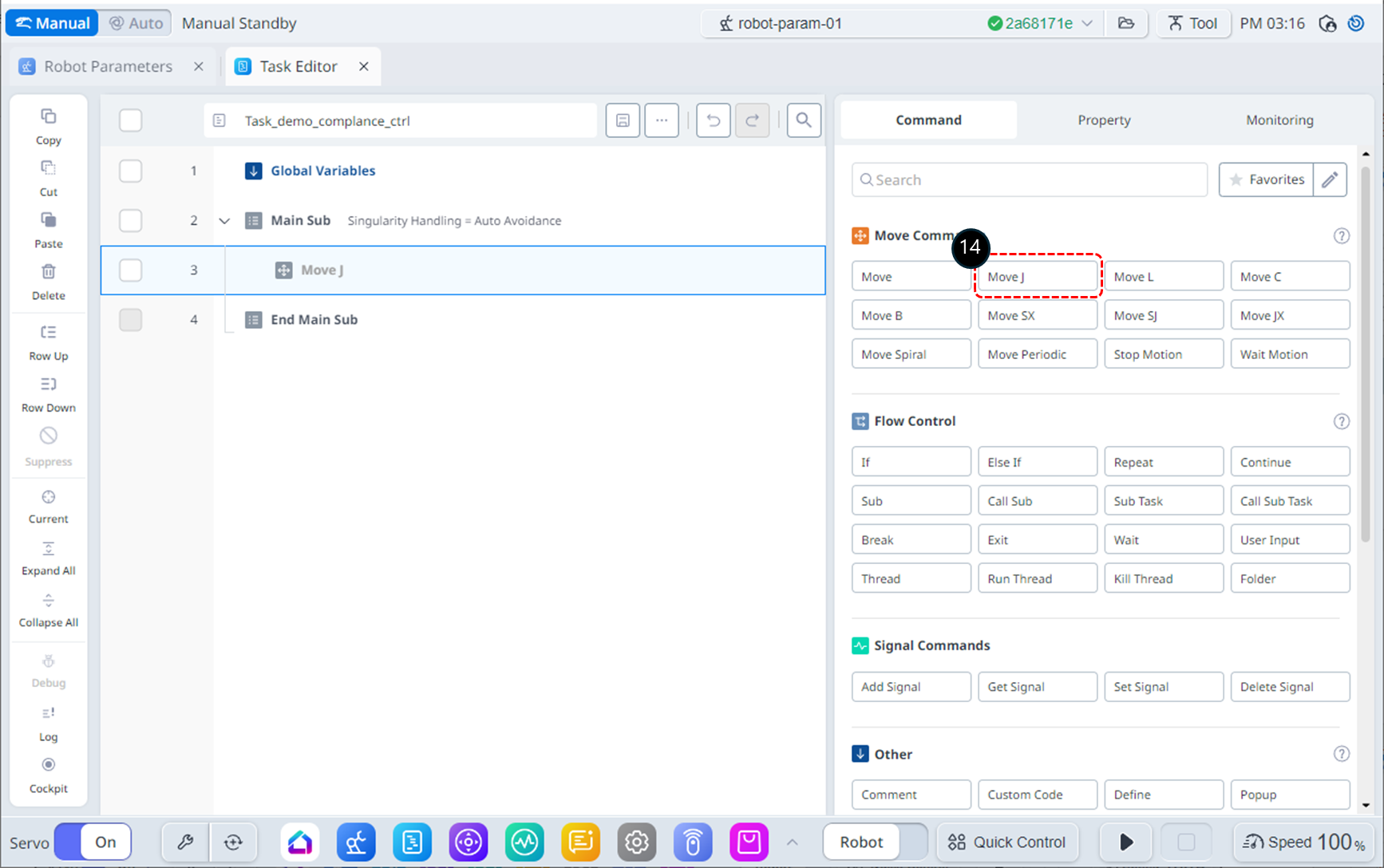
Adja hozzá a MoveJ parancsot. Ezzel a paranccsal lehet a robotot kiindulási helyzetbe mozgatni a megfelelőség ellenőrzéséhez.
-
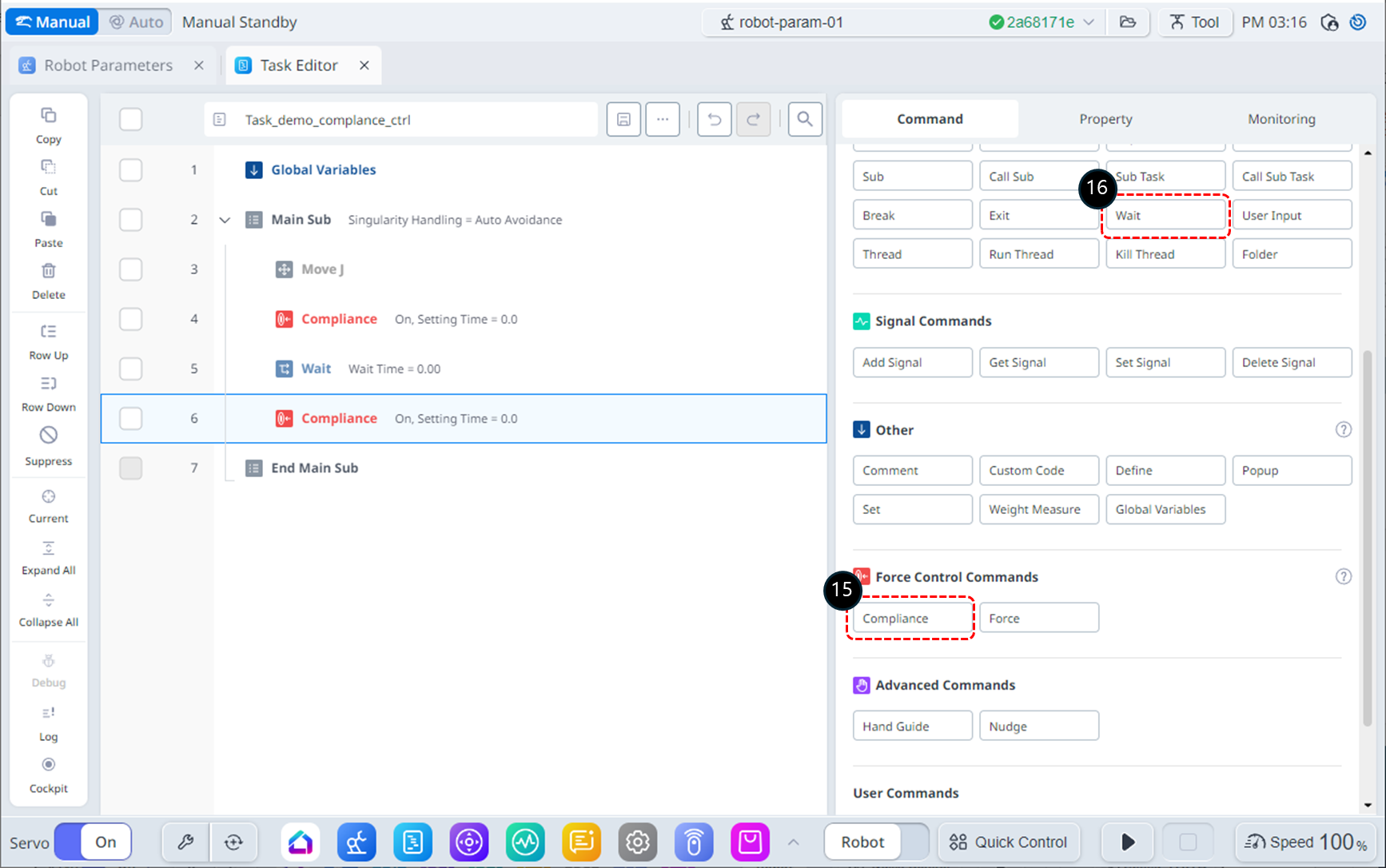
Adjon hozzá két megfelelőségi parancsot. Ezek a parancsok a megfelelőségi ellenőrzés aktiválására és deaktiválására szolgálnak.
-
Helyezzen be egy várakozási parancsot a megfelelőségi parancsok közé. Ez a várakozási parancs a megfelelőségi ellenőrzés fenntartására szolgál.
-
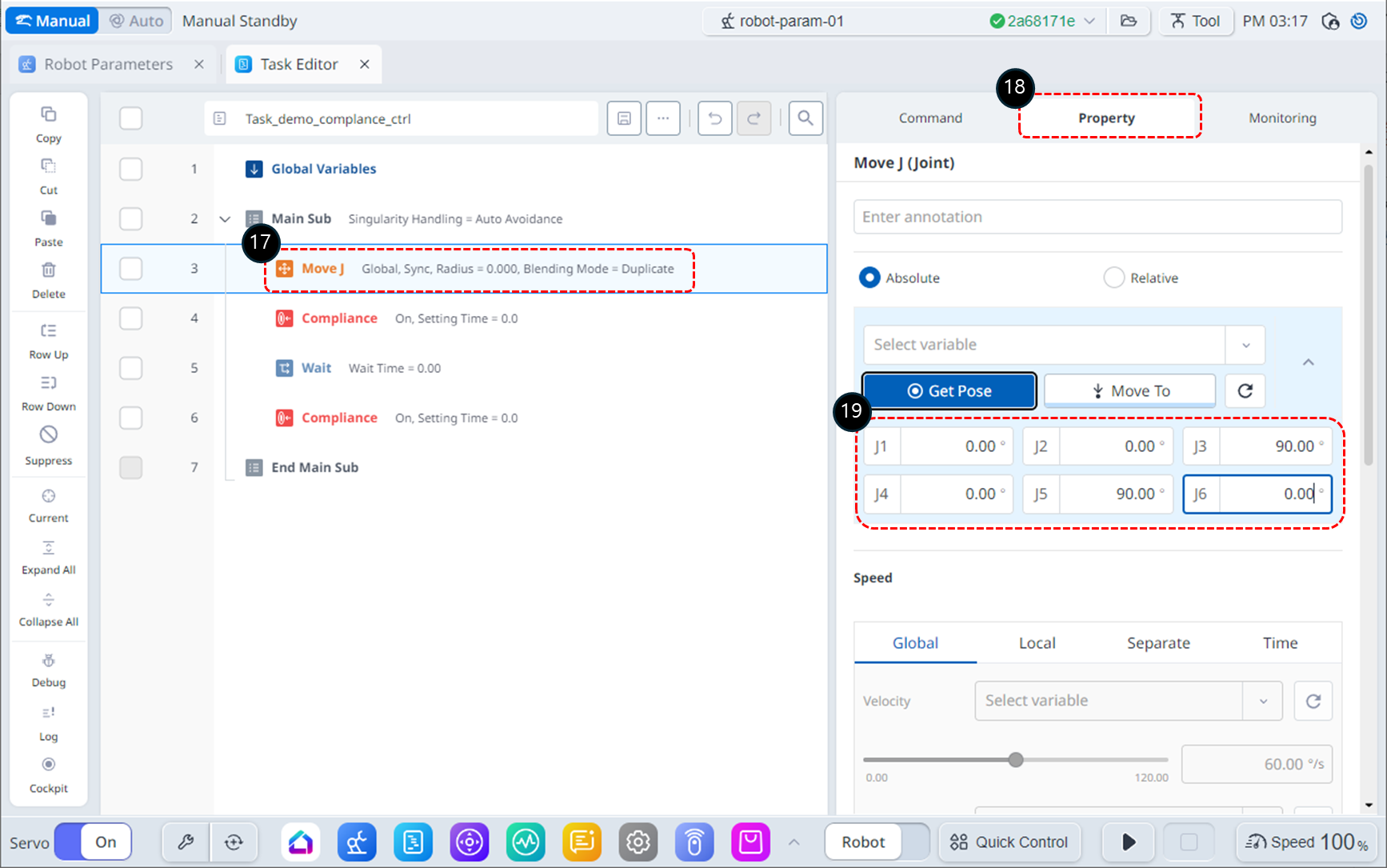
Válassza ki a MoveJ parancsot a 3. Sorban.
-
Válassza a Tulajdon lapot.
-
Módosítsa a MoveJ célpozícióját (0, 0, 90, 0, 90, 0) deg. A robot beépítési terétől függően szükség esetén az J1 szöge is beállítható.
-
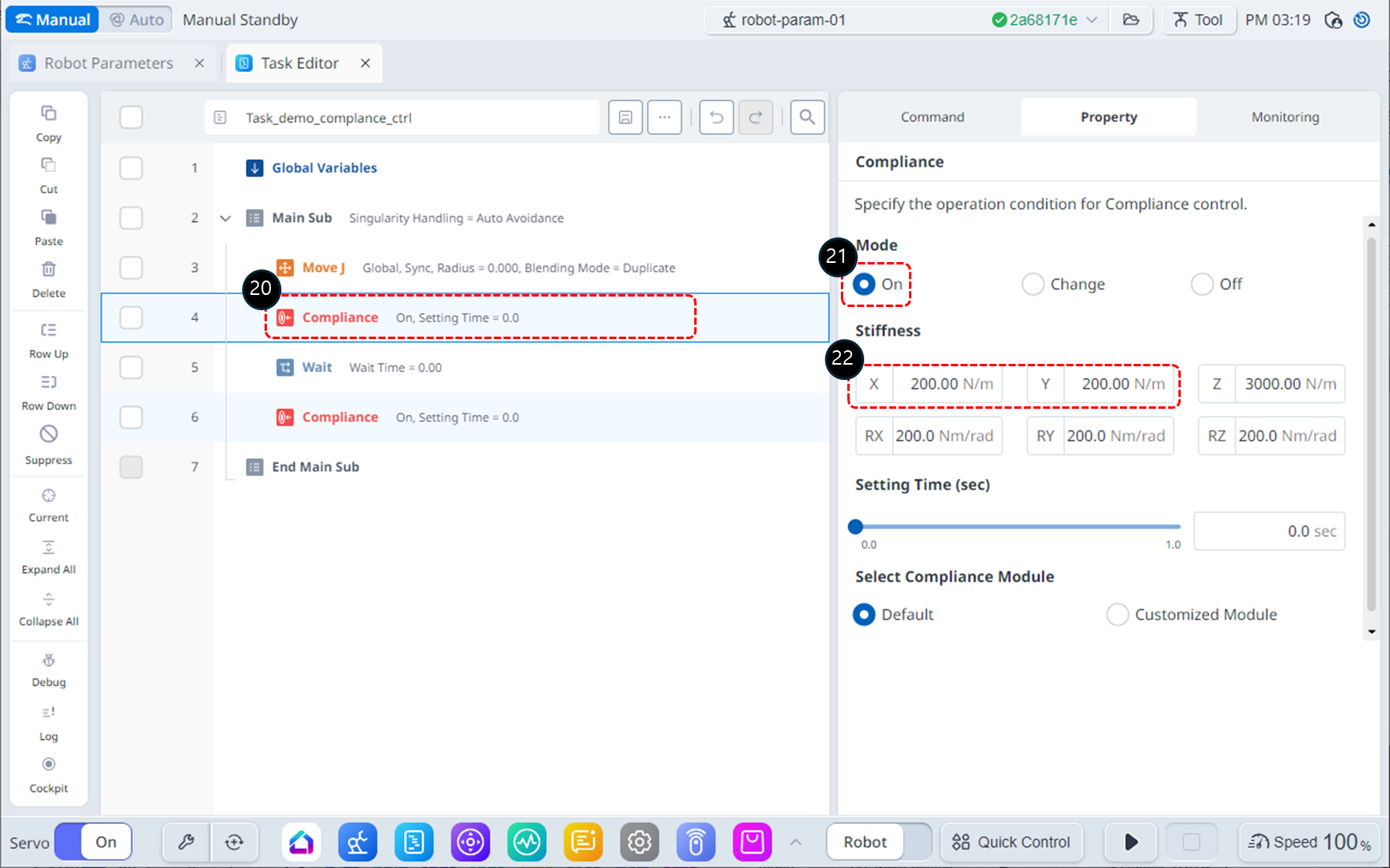
Válassza ki a Compliance parancsot a 4. Sorban.
-
A Tulajdonság lapon állítsa be az üzemmódot az alábbiak szerint: A bekapcsolt üzemmód aktiválja a megfelelőségi ellenőrzést.
-
Üzemmód: Be
-
-
Állítsa be a merevséget az alábbiak szerint: Csökkentse a merevséget az X és Y irányban, hogy a robot lágyabban reagáljon ezekre az irányokra.
-
X: 200 N/m
-
Y: 200 N/m
-
Z: 3000 N/m (alapértelmezett)
-
Rx, Ry, Rz: 200 Nm/rad (alapértelmezett)
-
-
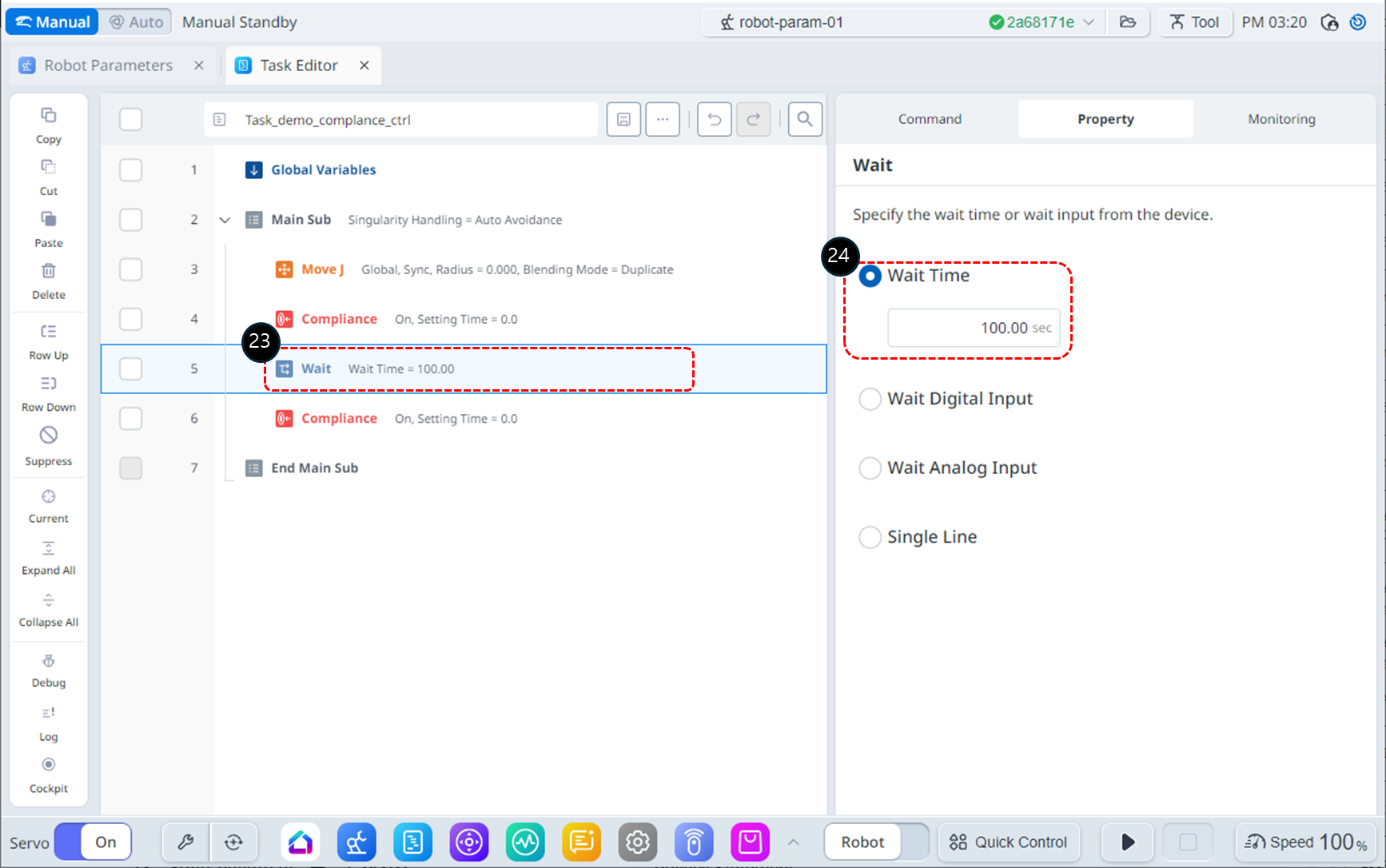
Válassza ki a várakozás parancsot a 5. Sorban.
-
Állítsa be a várakozási időt az alábbiak szerint.
-
Várakozási idő: 100 mp
-
-
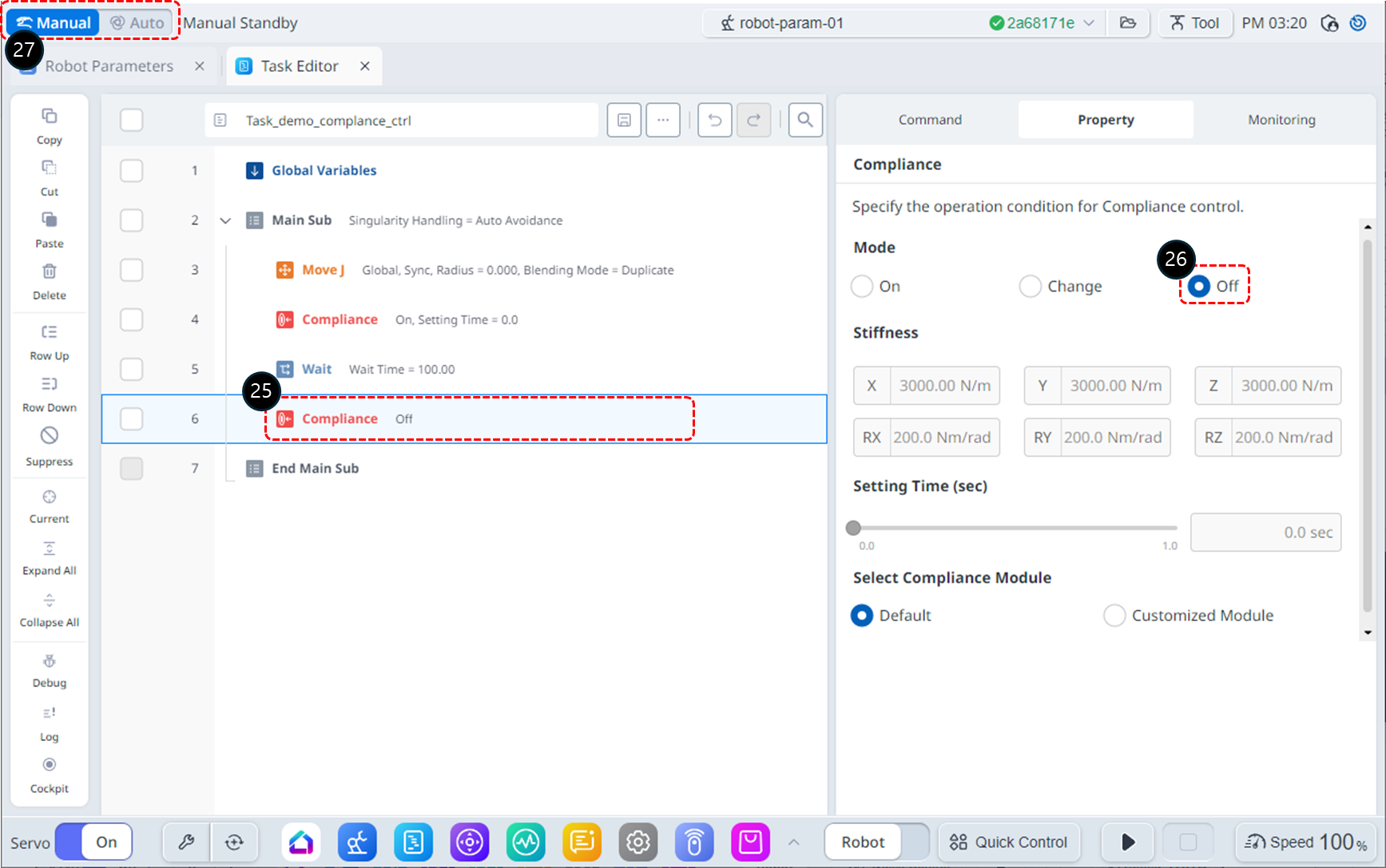
Válassza ki a Compliance parancsot a 6. Sorban.
-
A Tulajdonság lapon állítsa be az üzemmódot az alábbiak szerint: A kikapcsolt üzemmód kikapcsolja a megfelelőségi ellenőrzést.
-
Üzemmód: Ki
-
-
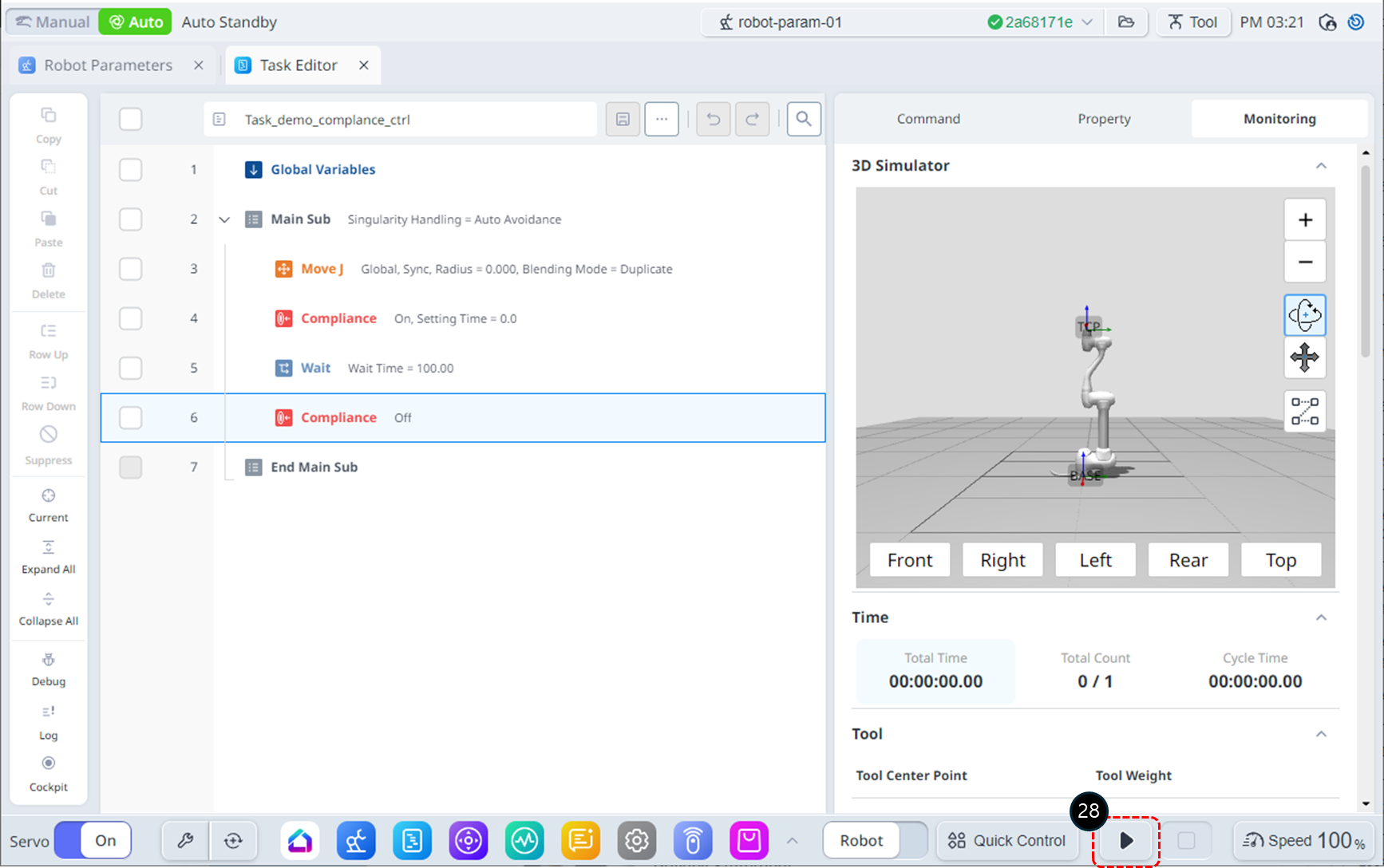
Állítsa a működési módot Auto (Automatikus) állásba. A Tulajdonság lap automatikusan átvált a Monitorozás lapra.
-
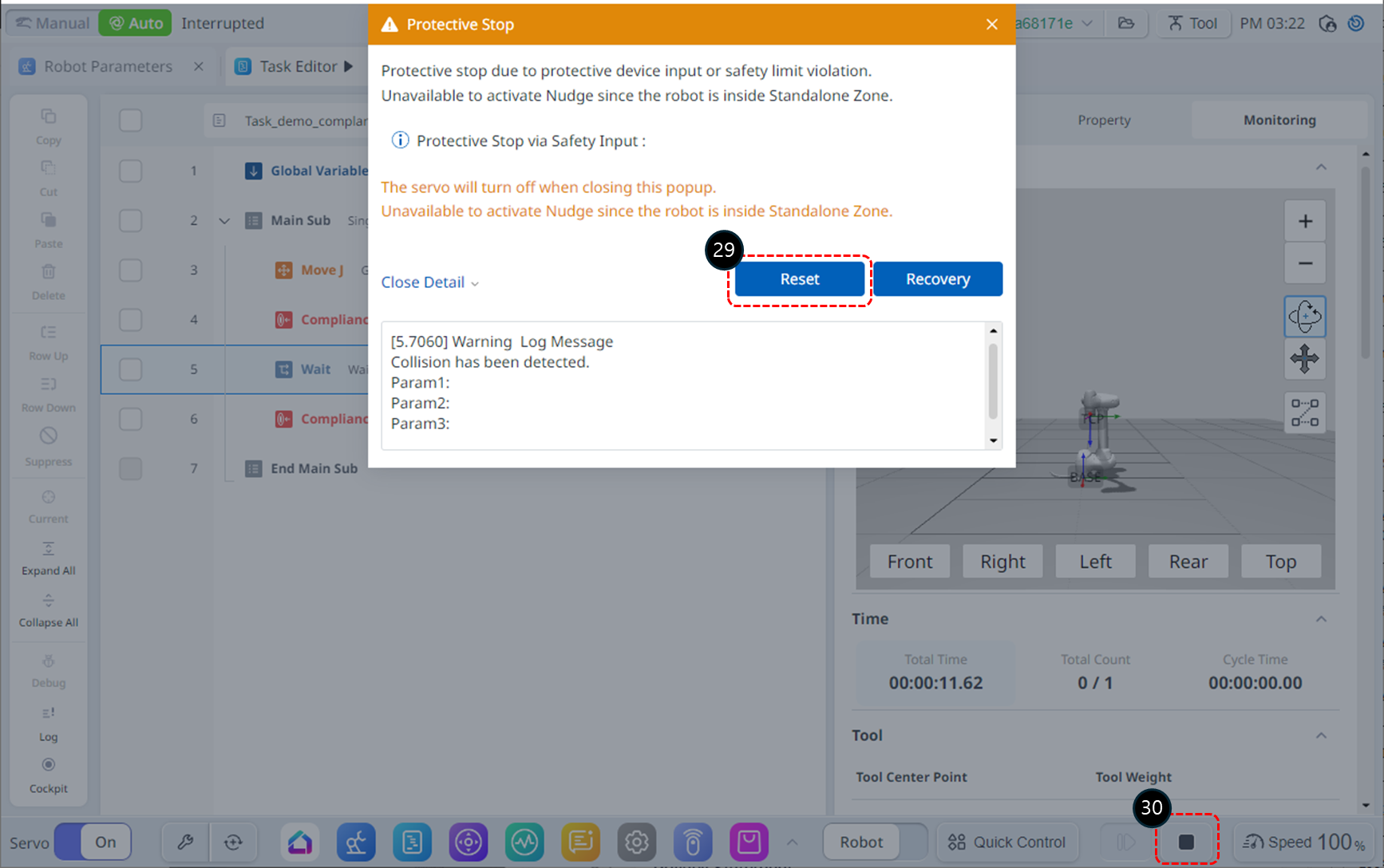
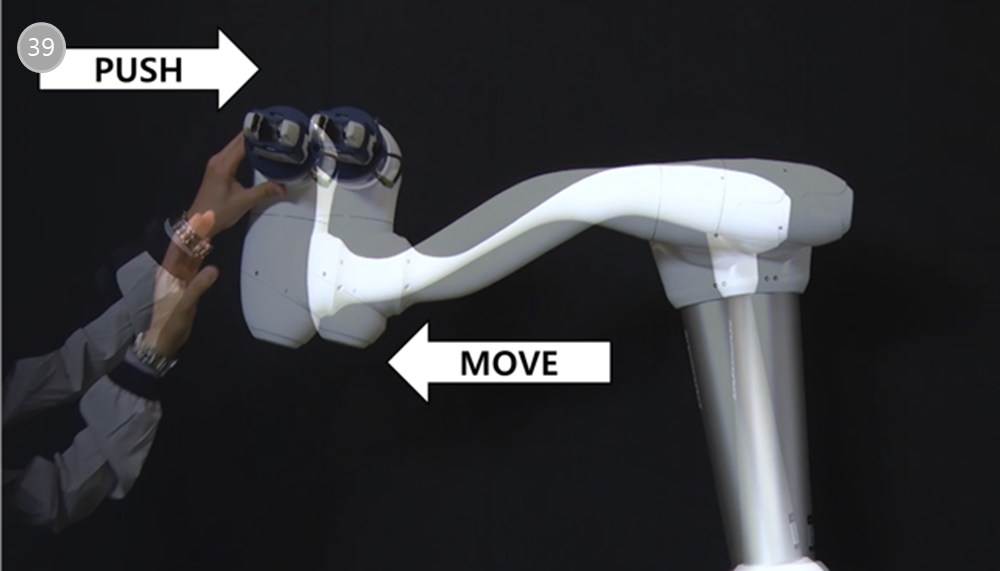
Kattintson a Futtatás gombra. A robot kiinduló helyzetbe kerül, elindítja a megfelelőségi ellenőrzést, és 100 másodpercig álló helyzetben marad. Ez idő alatt óvatosan tolja a robot végszabályozóját a robot teste felé. A robot ütközési hibával (vagy TCP Force Limit hibával) leáll. Az ütközés által okozott biztonsági ütközési állapotban a robot LED-je sárga színű lesz.
-
Kattintson a Reset (Visszaállítás) gombra a biztonsági leállítás figyelmeztető ablakában. A munkaprogram folytatja a műveletet.
-
Kattintson a Leállítás gombra a program befejezéséhez.
-
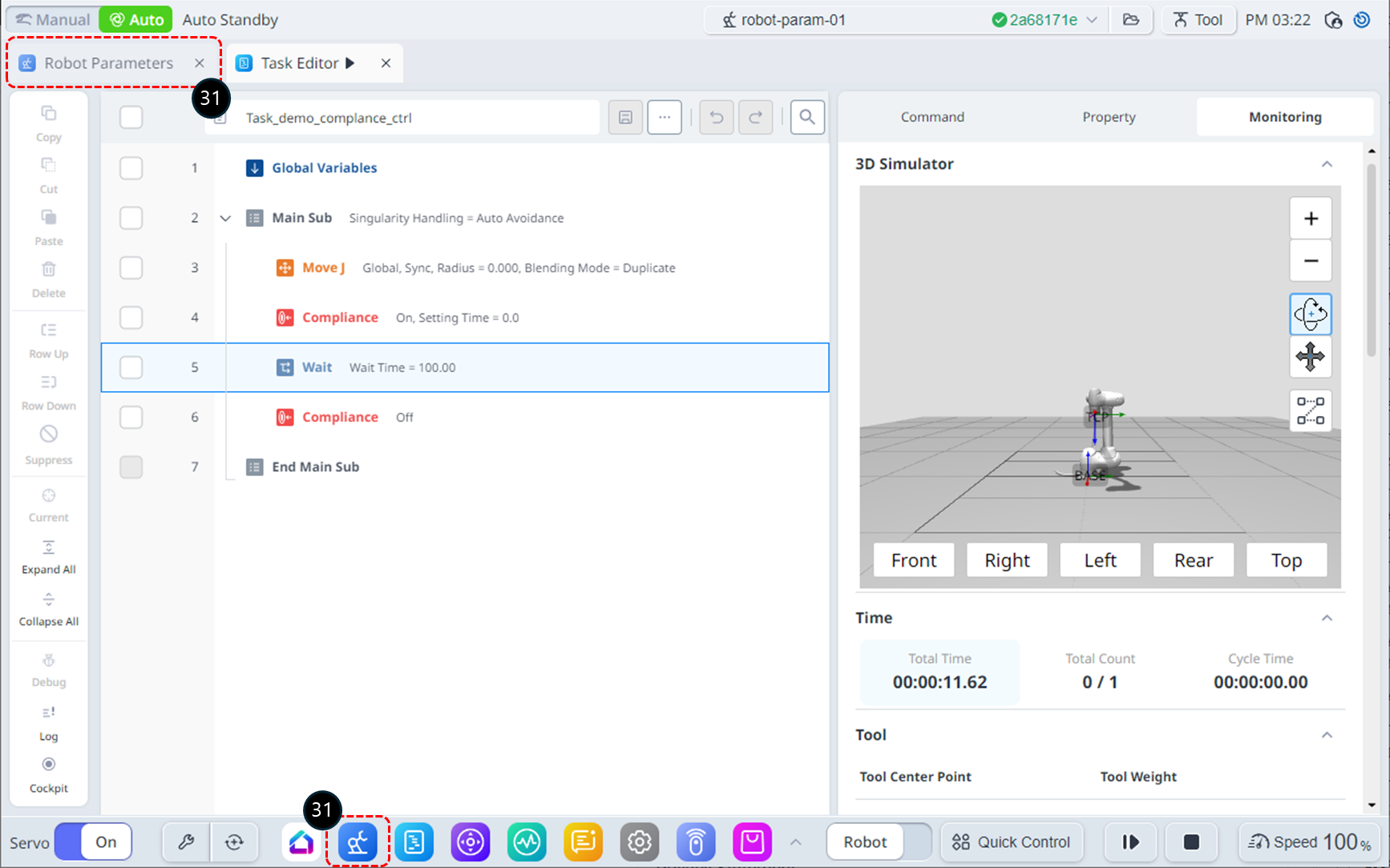
Az ütközési problémák megoldása érdekében a biztonsági beállításokban csökkenteni kell az ütközési érzékenységet. (TCP erőkorlát probléma esetén a TCP erőparaméter értékét növelni kell.) Válassza ki a Robot Parameters (Robot paraméterek) modult az alsó menüből. A bal felső sarokban is kiválaszthatja a Robot Parameters (Robot paraméterek) modul fület, amely ugyanúgy működik.
-
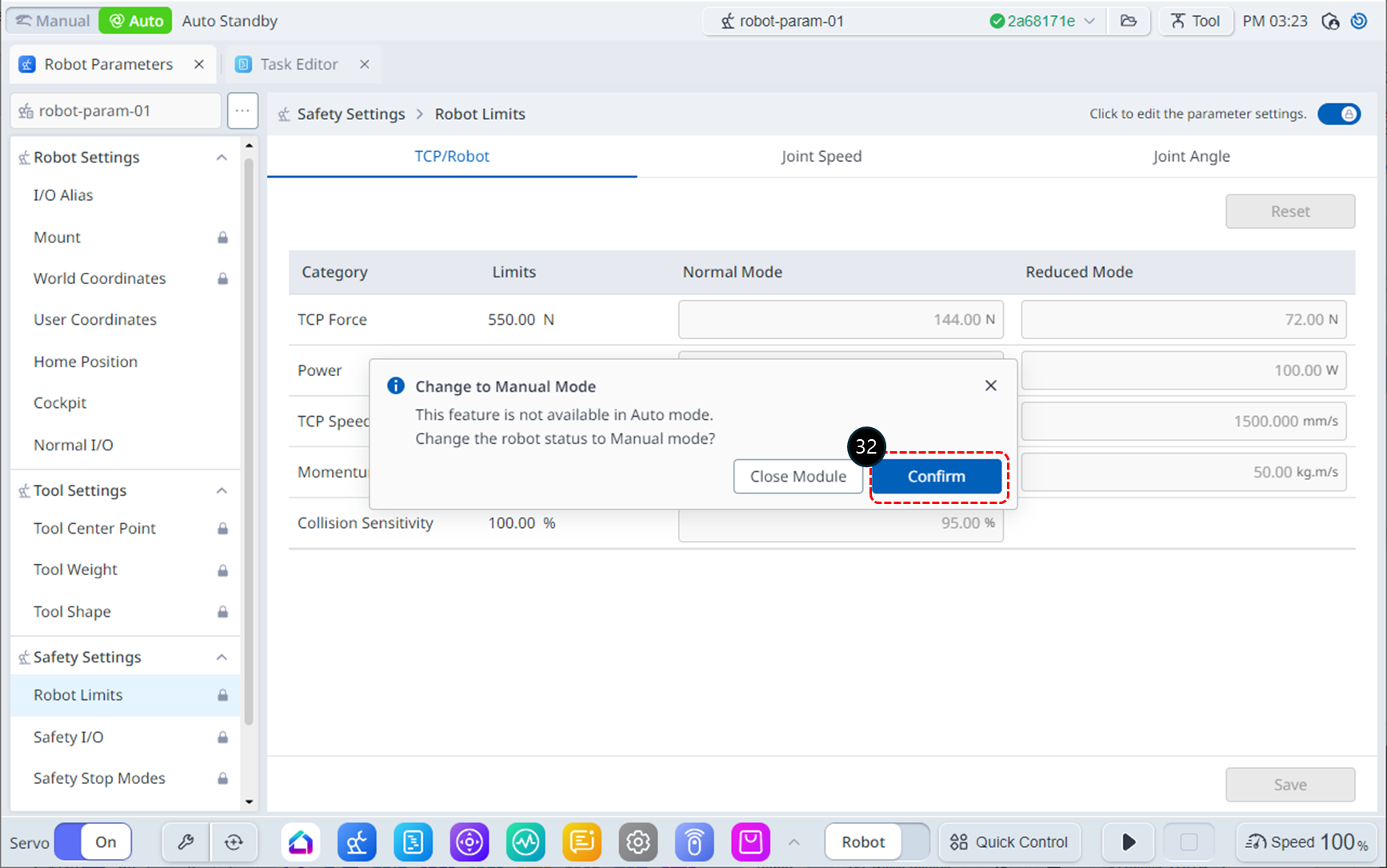
Automatikus módban a Robot Parameters (Robot paraméterek) modul elérése értesítési ablakot vált ki. Kattintson a Confirm (Megerősítés) gombra a Manuális üzemmódba való váltáshoz.
-
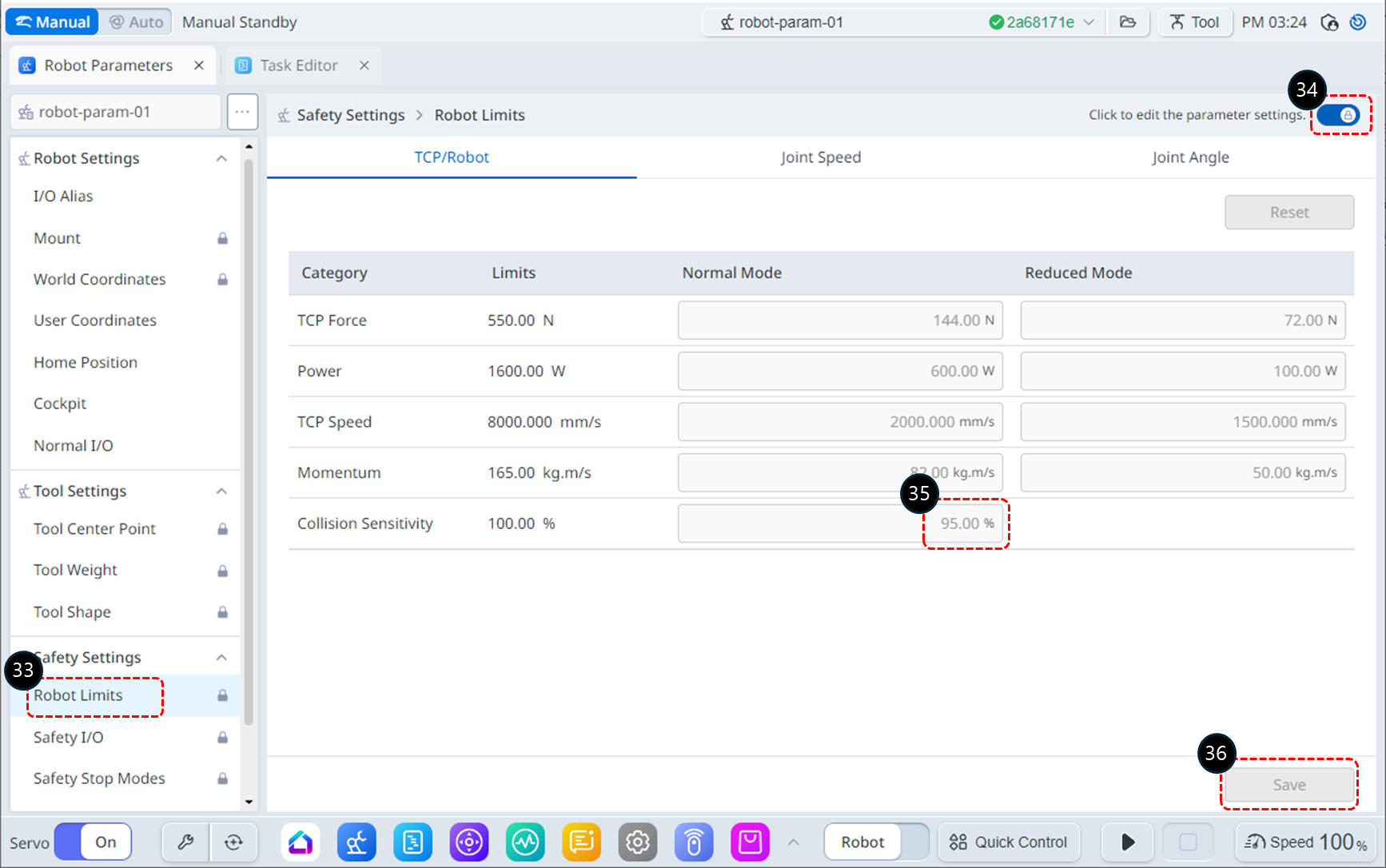
Válassza ki a Robot Limits (Robot határértékek)
-
Engedélyezze a paraméter szerkesztési állapotát. Ha megjelenik egy jelszó beviteli ablak, olvassa el a 6–7. Lépést.
-
Módosítsa az ütközési érzékenységet 50%-ra.
-
A beállítások mentéséhez kattintson a Mentés gombra. Ha megjelenik a Robot Parameters Review (Robot paraméterek áttekintése) ablak, tekintse át a módosításokat, és kattintson az Apply (alkalmaz) gombra.
-
Válassza a Feladatszerkesztő modul fület.
-
Váltson automatikus üzemmódra a Feladatprogram végrehajtásához.
-
Kattintson a Futtatás gombra. A várakozási idő alatt óvatosan tolja a robot végszabályozóját a robot teste felé. A robot a toló erő miatt mozog, és amint elengedi a kezét, visszatér az eredeti helyére.