Unknown Attachment
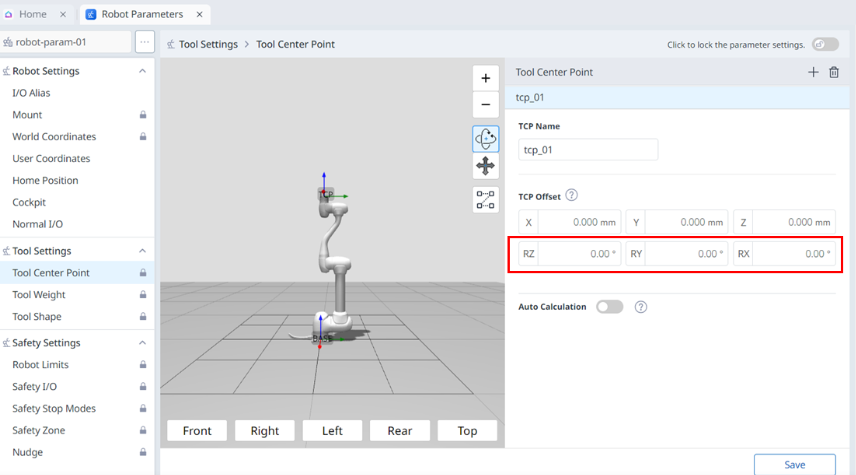
Punto centrale dello strumento
Quando si configura il punto centrale dell'utensile (TCP), è necessario definire anche la posizione e l'angolo di rotazione in base alle coordinate della flangia. ime, la distanza dal punto iniziale predefinito della coordinata della flangia al punto del centro utensile (TCP) nelle direzioni X, Y e Z non può essere impostata su un valore maggiore di 10000 mm. Inoltre, si noti che controllo forza, controllo conformità e fissaggio diretto del punto di apprendimento sono disponibili solo quando le lunghezze convertite di X, Y e Z ( ![]()
Se il punto centrale dell'utensile (TCP) è configurato utilizzando il calcolo automatico, il calcolo viene eseguito solo in base alle posizioni X, Y e Z, quindi è necessario immettere l'angolo di rotazione. L'angolo di rotazione può essere definito con RZ, RY e RX e si basa sul metodo di rotazione "Eulero Z-Y-Z".
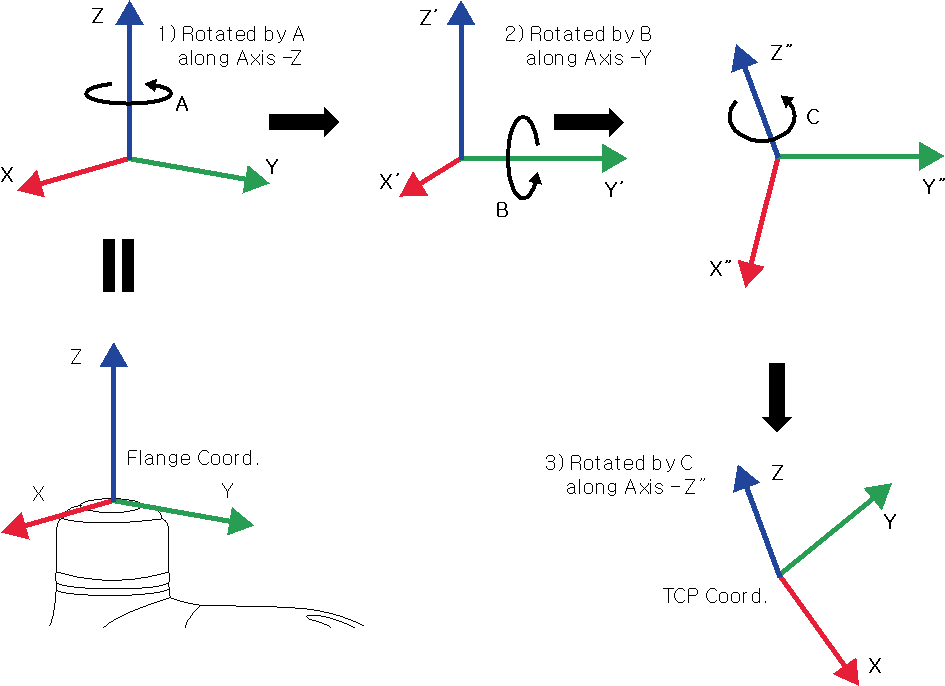
Le definizioni dell'asse delle coordinate espresse con x, y, z e dell'asse delle coordinate espresse con X, Y, Z sono le seguenti:
-
Asse di coordinate della “coordinata flangia” (x, y, z): La direzione dell'asse delle coordinate della "coordinata della flangia" definita all'estremità della flangia è identica alla coordinata del robot quando l'angolo di giunzione del robot è (0,0,0,0,0,0).
-
Asse di coordinate della "coordinata TCP" (X, Y, Z): Questo viene impostato all'estremità o al punto di lavoro dell'attrezzo montato sull'estremità della flangia. A questo punto, l'angolo di rotazione della "coordinata TCP" è definito in base alla "coordinata flangia" nell'ordine da 1) a 3) dei seguenti elementi:
-
Ruotare Di gradi lungo l'asse z della coordinata della flangia.
-
Ruotare B gradi lungo l’asse y’ della coordinata ruotata secondo il punto 1).
-
Ruotare C gradi lungo l’asse z’’ della coordinata ruotata secondo il punto 2).
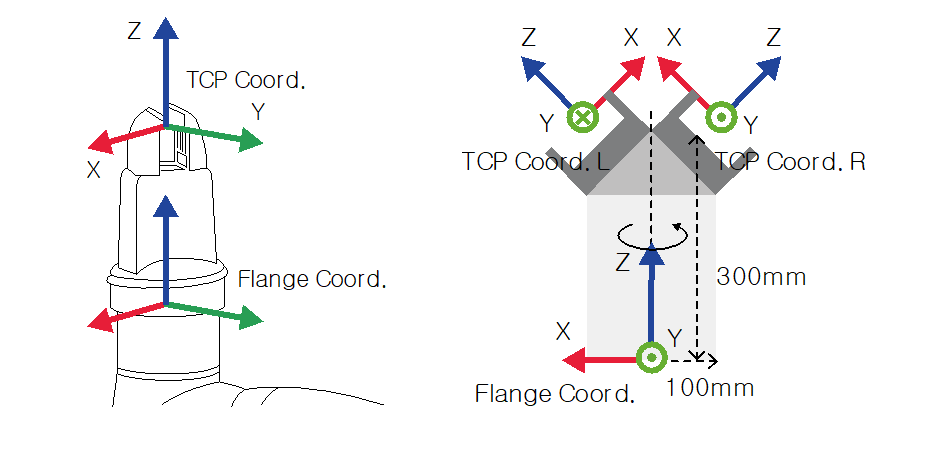
Di seguito sono riportati alcuni esempi di configurazione del TCP in base al metodo descritto in precedenza:
-
[X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pinza per uso generico con offset solo in direzione Z (TCP Coord)
-
[X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pinza sinistra con angolo di 45 gradi (TCP Coord. L)
-
[X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pinza destra con angolo di 45 gradi (TCP Coord. R)
Unknown Attachment
Menu
|
Elementi |
Descrizione |
|
|---|---|---|
|
1 |
Pulsante di attivazione/disattivazione blocco |
Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
|
2 |
Simulazione 3D. |
Qui è possibile simulare il punto centrale dello strumento configurato. |
|
3 |
Aggiunta |
Questo pulsante consente di aggiungere il protocollo TCP. |
|
4 |
Eliminazione |
Questo pulsante consente di eliminare il TCP selezionato. |
|
5 |
Salva |
Questo pulsante consente di salvare i valori di impostazione. |
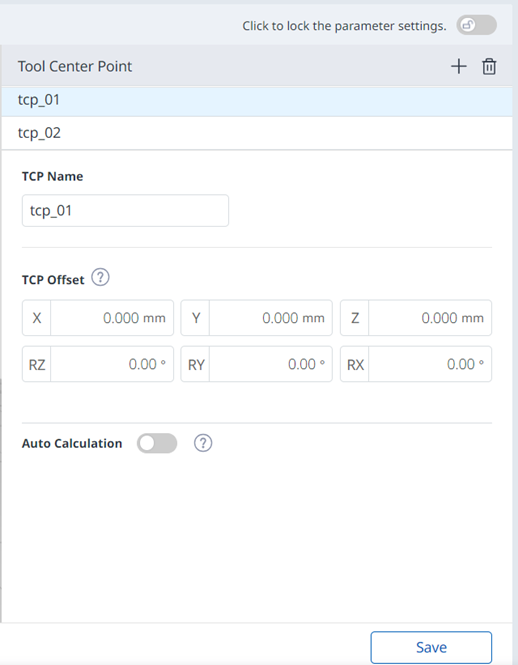
Quando le impostazioni sono bloccate, viene visualizzata la schermata riportata di seguito.
Unknown Attachment
A questo punto, il TCP selezionato viene visualizzato in blu, come mostrato di seguito.
Peso utensile
È possibile impostare il peso dello strumento montato sulla flangia aggiungendo un peso utensile. Il peso dell'utensile può essere impostato selezionando robot Parameters (parametri robot) > Tool Settings (Impostazioni utensile) > Tool Weight (peso utensile).
-
Il peso dell'utensile può essere misurato utilizzando la funzione di misurazione automatica.
-
Si consiglia di aggiungere un peso per ogni utensile con un pezzo. Se il peso del pezzo è troppo pesante, il robot potrebbe riconoscere il peso del pezzo come forza esterna. Ciò avviene perché il robot determina questa forza esterna come collisione e si arresta.
-
Quando si crea un'attività, modificare il peso in base al processo per modificare il peso dell'utensile. Ad esempio, è possibile configurare un'attività per selezionare il peso standard dell'utensile prima di prelevare un pezzo e selezionare il peso dell'utensile con il pezzo dopo averlo prelevato.
L'elemento di peso utensile attivato può essere impostato come peso utensile standard premendo l'icona Imposta strumento ( ![]()
-
L'impostazione dell'utensile è uguale a quella degli altri comandi. Il comando Set (Imposta) può essere utilizzato quando si modifica il peso utensile durante l'esecuzione di un'attività. Per ulteriori informazioni, fare riferimento al modulo Editor operazioni .
Nota
-
È possibile registrare fino a cinquanta pesi diversi.
-
Nel caso della serie M, la funzione di regolazione automatica dell'accelerazione viene eseguita quando il peso massimo dell'utensile supera il peso massimo dell'utensile.
Unknown Attachment
Unknown Attachment
Menu
|
Elementi |
Descrizione |
|
|---|---|---|
|
1 |
Pulsante di attivazione/disattivazione blocco |
Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
|
2 |
Aggiunta |
Questo pulsante consente di aggiungere un nuovo peso strumento. |
|
3 |
Eliminazione |
Questo pulsante consente di eliminare un peso utensile. |
|
4 |
Elenco pesi utensile |
Un elenco dei pesi utensile configurati. |
|
5 |
Nome peso utensile |
Qui è possibile immettere un nome per il peso utensile. |
|
6 |
Misurazione automatica del movimento |
Questo pulsante consente di eseguire la misurazione automatica. |
|
7 |
Misurazione automatica |
Questo pulsante consente di selezionare un'opzione ed eseguire una misurazione automatica. |
|
8 |
Selezione movimento |
È possibile selezionare il movimento desiderato dalle opzioni. |
|
9 |
Selezione dell'uso del peso |
È possibile scegliere se utilizzare il peso. Questa casella di selezione è disabilitata per la serie e o la serie A senza sensori FPT. |
|
10 |
Immissione peso |
Qui è possibile immettere il peso desiderato. |
|
11 |
Selezione dell'uso di Center of Gravity CX (Centro di gravità CX) |
È possibile selezionare l'uso del baricentro CX. |
|
12 |
Ingresso CX |
È possibile immettere CX. |
|
13 |
Selezione dell'uso del centro di gravità CY |
È possibile selezionare l'uso del baricentro CY. |
|
14 |
Ingresso CY |
È possibile immettere CY. |
|
15 |
Selezione dell'uso del Centro di gravità CZ |
È possibile selezionare l'uso del baricentro CZ. |
|
16 |
Ingresso CZ |
È possibile immettere CZ. |
|
17 |
Indica se usare inerzia |
Questa casella di controllo consente di scegliere se utilizzare l'inerzia. |
|
18 |
Ingresso lxx |
È possibile immettere una voce lxx per inerzia. |
|
19 |
Ingresso liy |
È possibile immettere una voce di lisi per inerzia. |
|
20 |
Ingresso lzz |
È possibile immettere una voce lzz per inerzia. |
|
21 |
Ingresso Lxy |
È possibile immettere una voce lxy per l'inerzia. |
|
22 |
Ingresso lyz |
È possibile immettere una voce lyz per inerzia. |
|
23 |
Ingresso lzx |
È possibile immettere una voce lzx per inerzia. |
|
24 |
Salva |
Questo pulsante consente di salvare i valori di impostazione. |
Forma utensile
La forma dell'attrezzo montato sulla flangia può essere impostata aggiungendo una forma dell'attrezzo.
La forma utensile può essere impostata nel modulo robot Parameters (parametri robot) > Tool Settings (Impostazioni utensile) > Tool Shape (forma utensile). Per ulteriori informazioni, fare riferimento a forma utensile.
-
Il robot determina lo stato di violazione del limite di spazio in base al TCP (Tool Center Point, punto centrale utensile) dell'estremità del robot e del corpo del robot. Se il robot effettivo ha una forma utensile più grande del TCP impostato, è necessario aggiungere una forma utensile per proteggere il pezzo e l'utensile.
-
Prestare attenzione poiché la zona che il robot può manovrare diminuisce se la forma dell'utensile è troppo grande.
L'elemento forma utensile è disponibile solo dopo la registrazione (confermata) e l'attivazione dell'interruttore a bilanciere. L'elemento forma utensile attivato può essere impostato come forma utensile standard premendo l'icona Imposta strumento ( ![]()
-
L'impostazione dell'utensile è uguale a quella degli altri comandi. Il comando Imposta può essere utilizzato quando si modifica la forma utensile durante l'esecuzione di un'attività. Per ulteriori informazioni, fare riferimento al modulo Editor operazioni.
Nota
È possibile registrare fino a cinquanta forme di utensile diverse.
Unknown Attachment
Menu
|
Elementi |
Descrizione |
|
|---|---|---|
|
1 |
Pulsante di attivazione/disattivazione blocco |
Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
|
2 |
Simulazione 3D. |
È qui che è possibile simulare il risultato della forma utensile configurata in 3D. |
|
3 |
Nome forma utensile |
Il nome dello strumento configurato. |
|
4 |
Forma dello strumento |
La forma dello strumento configurato. |
|
5 |
Modifica della forma dello strumento |
Questo pulsante consente di modificare la forma utensile configurata. |
|
6 |
Eliminazione della forma utensile |
Questo pulsante consente di eliminare la forma utensile selezionata. |
|
7 |
Aggiunta della forma strumento |
È possibile aggiungere una forma utensile. |
|
8 |
Applicazione |
Questo pulsante consente di applicare la forma utensile dopo averla impostata. |
Unknown Attachment
Menu
|
Elementi |
Descrizione |
|
|---|---|---|
|
1 |
Forma utensile |
Indica che questo riquadro è una finestra a comparsa forma strumento. |
|
2 |
Immissione di un nome |
Questo è un campo in cui è possibile immettere il nome della forma utensile. |
|
3 |
Messaggio di avvertimento |
Nota di attenzione durante la configurazione |
|
4 |
Aggiungi nuovo cuboide |
Questo pulsante consente di aggiungere un cuboide. |
|
5 |
Aggiungi nuova sfera |
Questo pulsante consente di aggiungere una sfera. |
|
6 |
Aggiungi nuova Capsula |
Questo pulsante consente di aggiungere una capsula. |
|
7 |
Annulla |
Questo pulsante consente di annullare l'impostazione. |
|
8 |
Confermare |
Questo pulsante consente di confermare l'impostazione. |
Una volta aggiunto il cubo/sfera/capsula, il display viene visualizzato come indicato di seguito.
|
Unknown Attachment |
Unknown Attachment |
|
Unknown Attachment |
|