Comune
-
L'area effettiva può essere selezionata come interna/esterna.
-
Il tipo di forma può essere selezionato come sfera, cilindro, cuboide, cuboide inclinato o casella multipiano. Per ulteriori informazioni, vedere Panoramica delle impostazioni limite di spazio e zona.
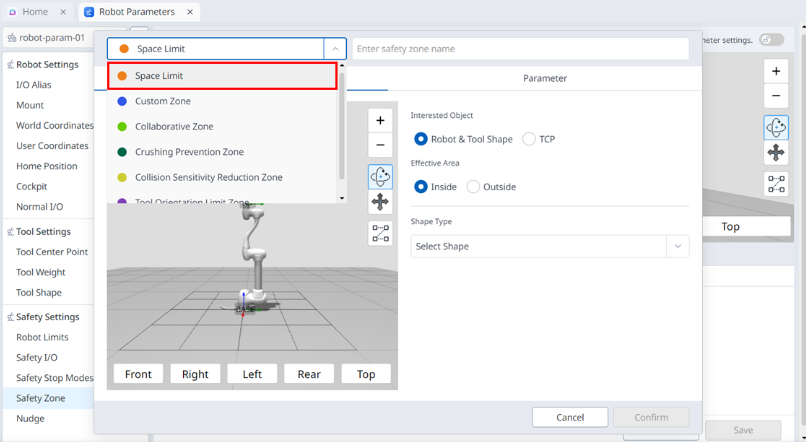
Impostazione del limite di spazio
Il limite di spazio è una funzione che imposta una recinzione virtuale nell'area più esterna del robot. È possibile utilizzare il robot senza impostare un limite di spazio, ma si consiglia di impostare un limite di spazio per un utilizzo sicuro.
È possibile impostarlo selezionando "limite spazio" in parametri robot > zona di sicurezza > Aggiungi > in alto a sinistra nella finestra a comparsa.
-
È possibile selezionare uno dei robot e Tool Shape/TCP per l'oggetto interessato.
-
Il robot deve trovarsi all'interno dell'area limite di spazio impostata per essere impostato normalmente.
Nota
A seconda della modalità di impostazione, esiste il valore predefinito di espansione spazio.
-
Impostazione forma utensile, quando si seleziona "TCP" per l'ispezione, valore del margine TCP 0 mm
-
Impostazione forma utensile, quando si seleziona "forma robot e utensile" per l'ispezione, valore del margine TCP 0 mm
-
Forma utensile non impostata, quando si seleziona "TCP" per l'ispezione, valore del margine TCP 0 mm
-
Forma utensile non impostata, quando si seleziona "forma robot e utensile" per l'ispezione, valore del margine TCP 60 mm
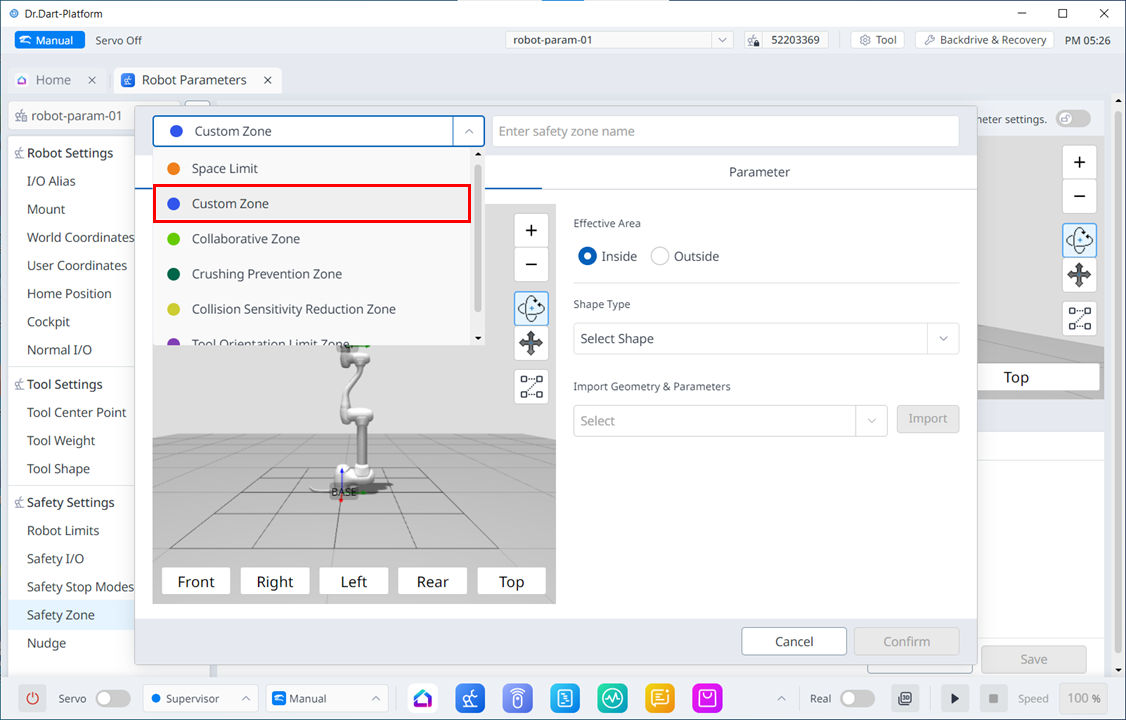
Impostazione della zona personalizzata
Custom zone è la zona di sicurezza più flessibile in cui è possibile impostare liberamente i parametri di sicurezza. È possibile configurare tutte le impostazioni, come i limiti del robot, la modalità di arresto sicuro, la velocità dei giunti e i limiti dell'angolo, in base alle proprie esigenze.
È possibile impostarlo selezionando "Custom zone" (zona personalizzata) in robot Parameters (parametri robot) > Safety zone (zona di sicurezza) > Add (Aggiungi) > popup in alto a sinistra.
Nota
Se il TCP si trova in una posizione in cui più aree si sovrappongono, le seguenti regole si applicano singolarmente a ciascuna funzione di sicurezza.
-
Modalità normale
-
Se nessuna zona è impostata su zone ad alta priorità, il valore limite di sicurezza più ristretto delle zone sovrapposte sarà il valore di riferimento dell'ispezione.
-
Se esiste una zona impostata come zona ad alta priorità, il valore limite per tale zona è il valore di riferimento dell'ispezione.
-
Se vi sono più di due zone impostate come zone ad alta priorità, il valore limite di sicurezza più rilassato delle zone sarà costituito dai criteri di ispezione.
-
-
Modalità riduzione
-
Se nessuna zona è impostata su zone ad alta priorità, il valore limite di sicurezza più ristretto delle zone sovrapposte sarà il valore di riferimento dell'ispezione.
-
Se una zona è impostata su una zona ad alta priorità, l'opzione di esclusione per quella zona determina il valore di riferimento dell'ispezione.
-
Se l'opzione di esclusione non è selezionata, il valore del limite di sicurezza più limitato tra la zona di priorità alta e il limite globale ridotto sarà il valore di riferimento dell'ispezione.
-
Se l'opzione di esclusione è selezionata, la zona ad alta priorità è il valore di riferimento del controllo.
-
-
Se vi sono più zone impostate su una zona ad alta priorità, l'opzione di esclusione per quella zona determina il valore di riferimento dell'ispezione.
-
Se l' opzione di esclusione non è selezionata per nessuna delle zone con priorità alta, la zona con priorità più alta per cui l'opzione di esclusione non è selezionata e il valore del limite di sicurezza più limitato del limite globale ridotto sarà il valore di riferimento dell'ispezione.
-
Se l' opzione di esclusione per tutte le zone con priorità alta è selezionata, il valore limite di sicurezza più rilassato tra le zone con priorità alta sarà costituito dai criteri di ispezione.
-
-
Impostazione della zona collaborativa
La zona collaborativa è una zona progettata per lavorare in sicurezza con i robot. Fornisce i limiti del robot, come le velocità di decelerazione necessarie per il lavoro a distanza ravvicinata e le impostazioni della modalità di arresto di sicurezza.
È possibile impostarlo selezionando "zona collaborativa" in robot Parameters (parametri robot) > Safety zone (zona di sicurezza) > Add (Aggiungi) > popup in alto a sinistra.
Unknown Attachment
Impostazione della zona di prevenzione frantumazione
La zona di prevenzione dello schiacciamento è una zona che impedisce i pericoli di schiacciamento che possono verificarsi tra il robot e altri oggetti. In questa zona, quando viene violato il limite di collisione e forza esterna, la modalità di arresto di sicurezza è fissata a RS1 (Reflex Stop) e la sensibilità di collisione è impostata al 100%, in modo che quando viene rilevata una collisione, il robot reagisce il più possibile alla forza esterna e quindi si arresta in sicurezza attraverso la reazione flottante.
È possibile impostarlo selezionando "zona di prevenzione schiacciamento" in parametri robot > zona di sicurezza > Aggiungi > popup in alto a sinistra.
Unknown Attachment
Impostazione della zona di riduzione della sensibilità alla collisione
La zona di riduzione della sensibilità di collisione è una zona che regola la sensibilità di rilevamento delle collisioni del robot quando si lavora con materiali o superfici diversi. Fornisce le impostazioni di sensibilità alla forza e alla collisione.
È possibile impostarlo selezionando "Collision Sensitivity Reduction zone" (zona di riduzione della sensibilità alla collisione) in robot Parameters (parametri robot) > Safety zone (zona di sicurezza) > Add (Aggiungi) > Top Left (in alto a sinistra della finestra popup.
Unknown Attachment
Impostazione della zona limite di orientamento utensile
La zona limite di orientamento dell'utensile è una zona che limita l'orientamento del TCP. Assicura che il TCP si trovi di fronte a una direzione specifica e impedisce che si trovi in una direzione non sicura definendo la direzione e il margine angolare.
È possibile impostarlo selezionando "Tool Orientation Limit zone" (zona limite orientamento utensile) in robot Parameters (parametri robot) > Safe zone (zona sicura) > Add (Aggiungi) > Top Left (in alto a sinistra del popup.
Unknown Attachment