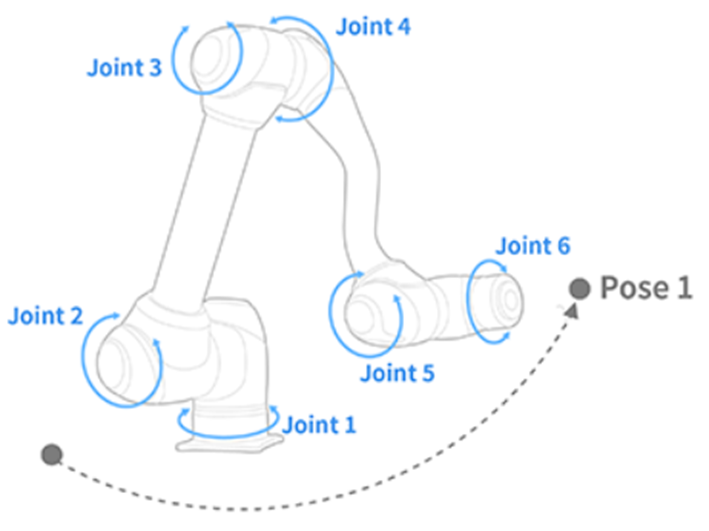
I robot Doosan Robotics offrono 9 movimenti. Il movimento del robot è controllato da movimenti standard, MoveJ e MoveL e 7 movimenti derivati da questi due movimenti.
Tipi di movimento del robot
|
|
Movimento |
Funzione |
|---|---|---|
|
1 |
MoveJ |
Ogni giunto del robot si sposta dall'angolo corrente all'angolo target e si arresta contemporaneamente
|
|
2 |
MoveL |
Il robot si sposta verso il punto target mantenendo il TCP del robot dritto
|
|
3 |
MoveSJ |
Il robot si muove in tutte le angolazioni impostate dal robot
|
|
4 |
MoveSX |
Il TCP del robot si sposta in tutti i punti
|
|
5 |
MoveJX |
La posa del robot viene designata quando il TCP del robot si sposta verso il punto target
|
|
6 |
MoveC |
Il TCP del robot si sposta verso il punto target mantenendo un arco 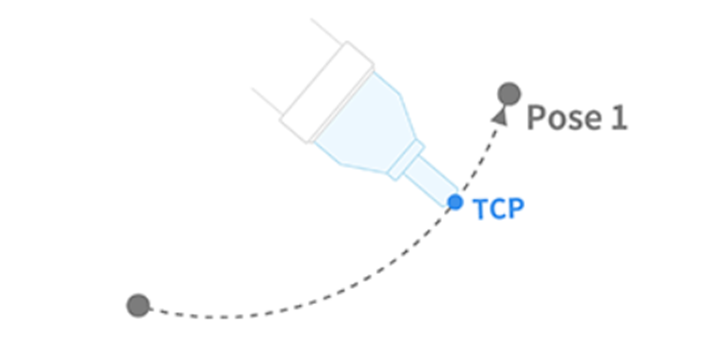
|
|
7 |
MoveB |
Il robot si sposta verso il punto finale target attraverso una sezione costituita da linee rette continue e archi 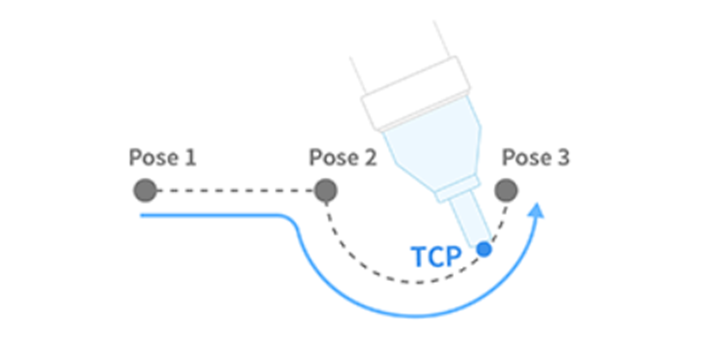
|
|
8 |
MoveSpiral |
Il robot si sposta dal centro della spirale al raggio massimo 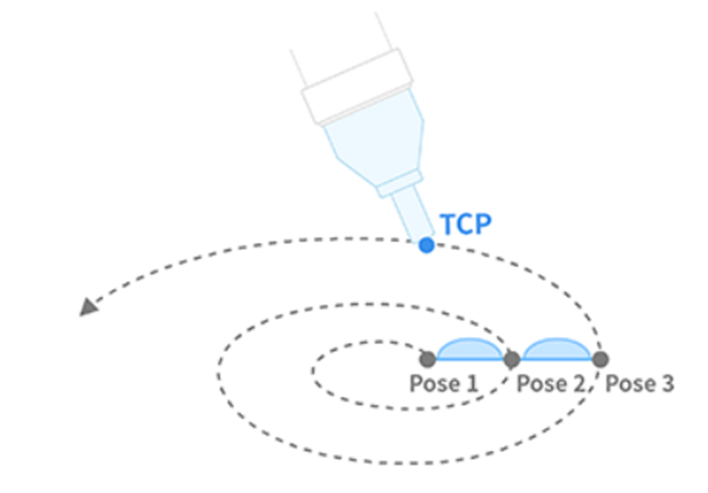
|
|
9 |
MovePeriodic |
Il robot si muove in un percorso con ampiezza e ciclo costanti 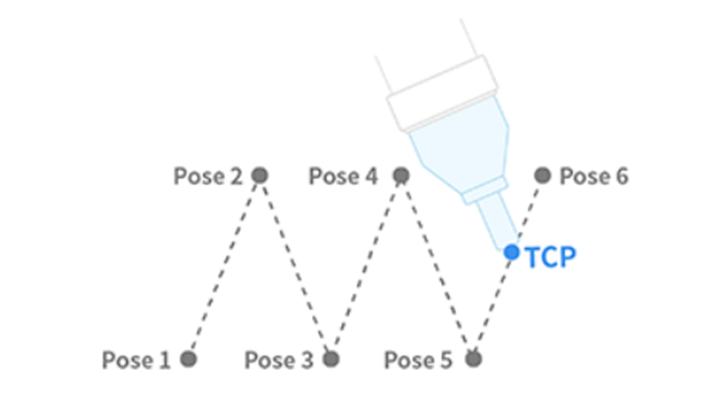
|
MoveJ&MoveL
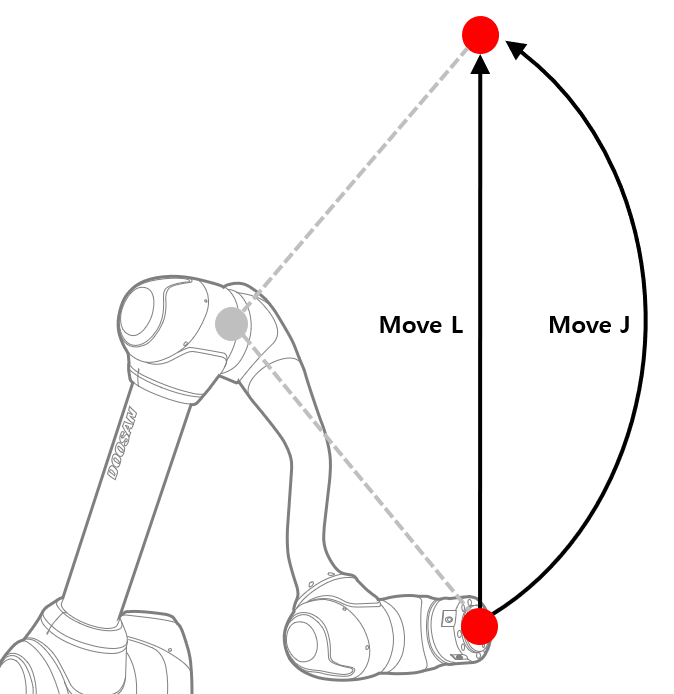
Prima di utilizzare il movimento del robot, è fondamentale comprendere i movimenti standard MoveJ e MoveL.
-
J in MoveJ si riferisce ai giunti. In questo movimento, ogni giunto si sposta verso l'angolo target e si arresta contemporaneamente.
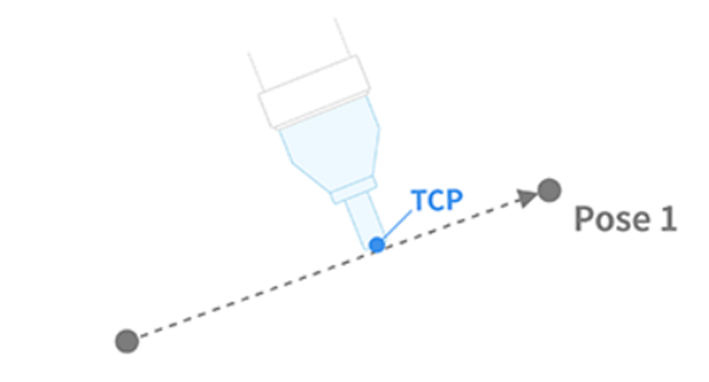
-
L in MoveL si riferisce a lineare. In questo movimento, il TCP sull'estremità del robot si sposta verso la posizione target (posizione e angolo) con movimento lineare.
|
|
Tipo |
MoveJ |
MoveL |
|---|---|---|---|
|
1 |
Sposta metodo |
|
|
|
2 |
Vantaggio |
|
|
|
3 |
Svantaggio |
|
|
|
4 |
Utilizzo |
|
|