Attenzione
Prima di provare il campione, leggere e seguire le precauzioni. Per ulteriori informazioni, fare riferimento ALLA PARTE 1. Manuale di sicurezza.
Nota
Questo esempio richiede il file di scrittura attività creato negli esempi di comando prova conformità
-
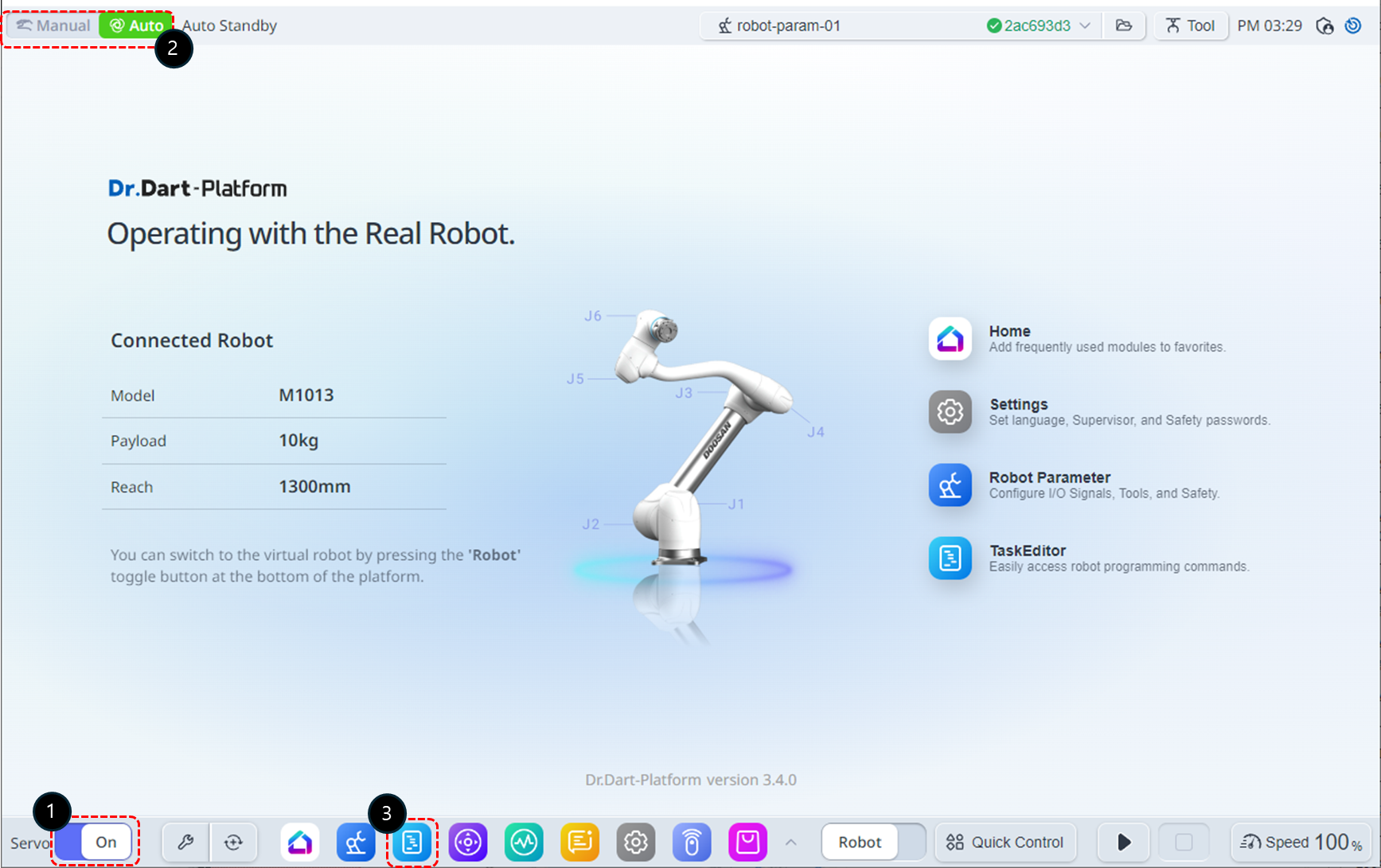
Modificare lo stato del servomeccanismo su On.
-
Impostare la modalità operativa su Manuale.
-
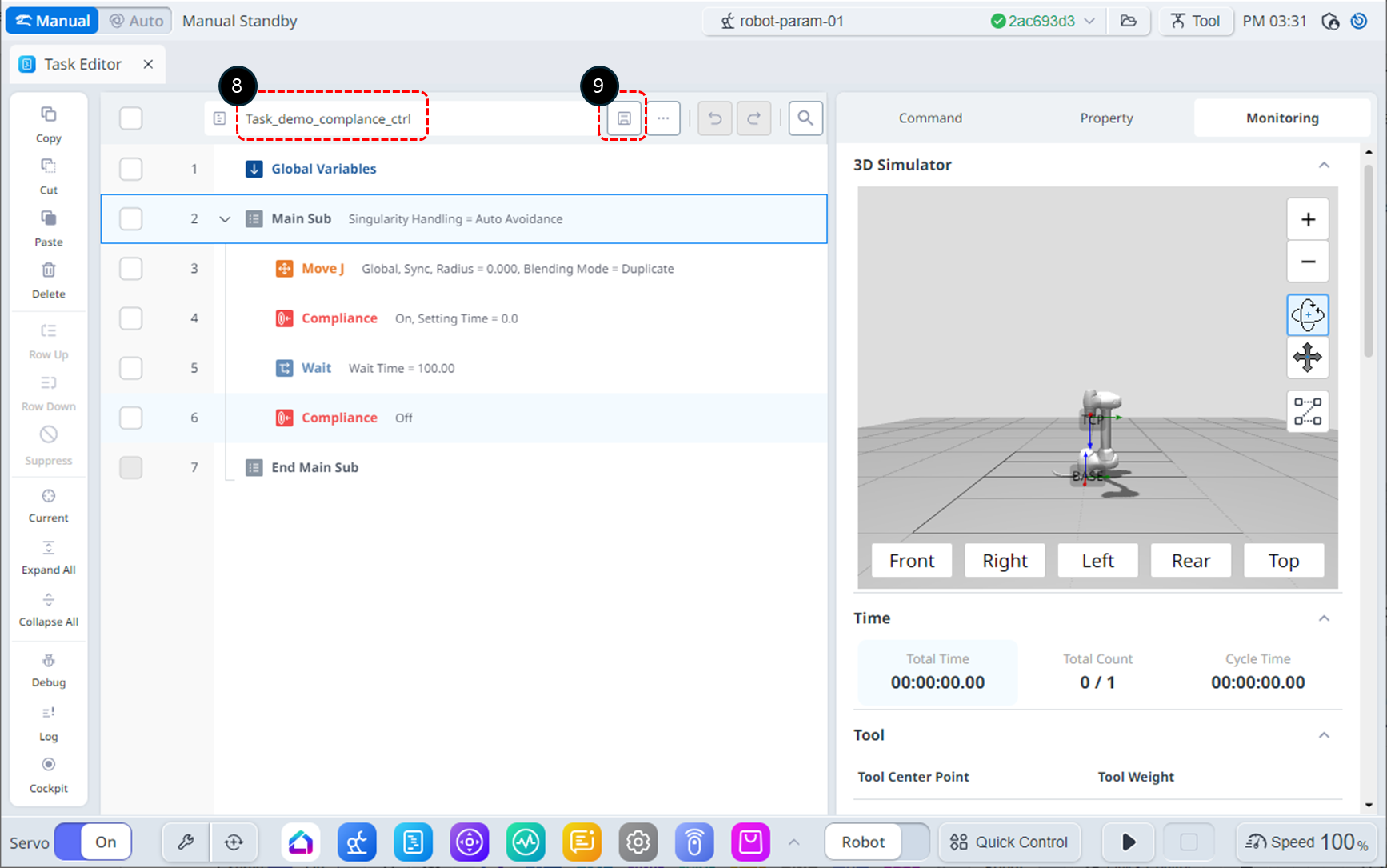
Selezionare il modulo Editor operazioni dal menu in basso.
-
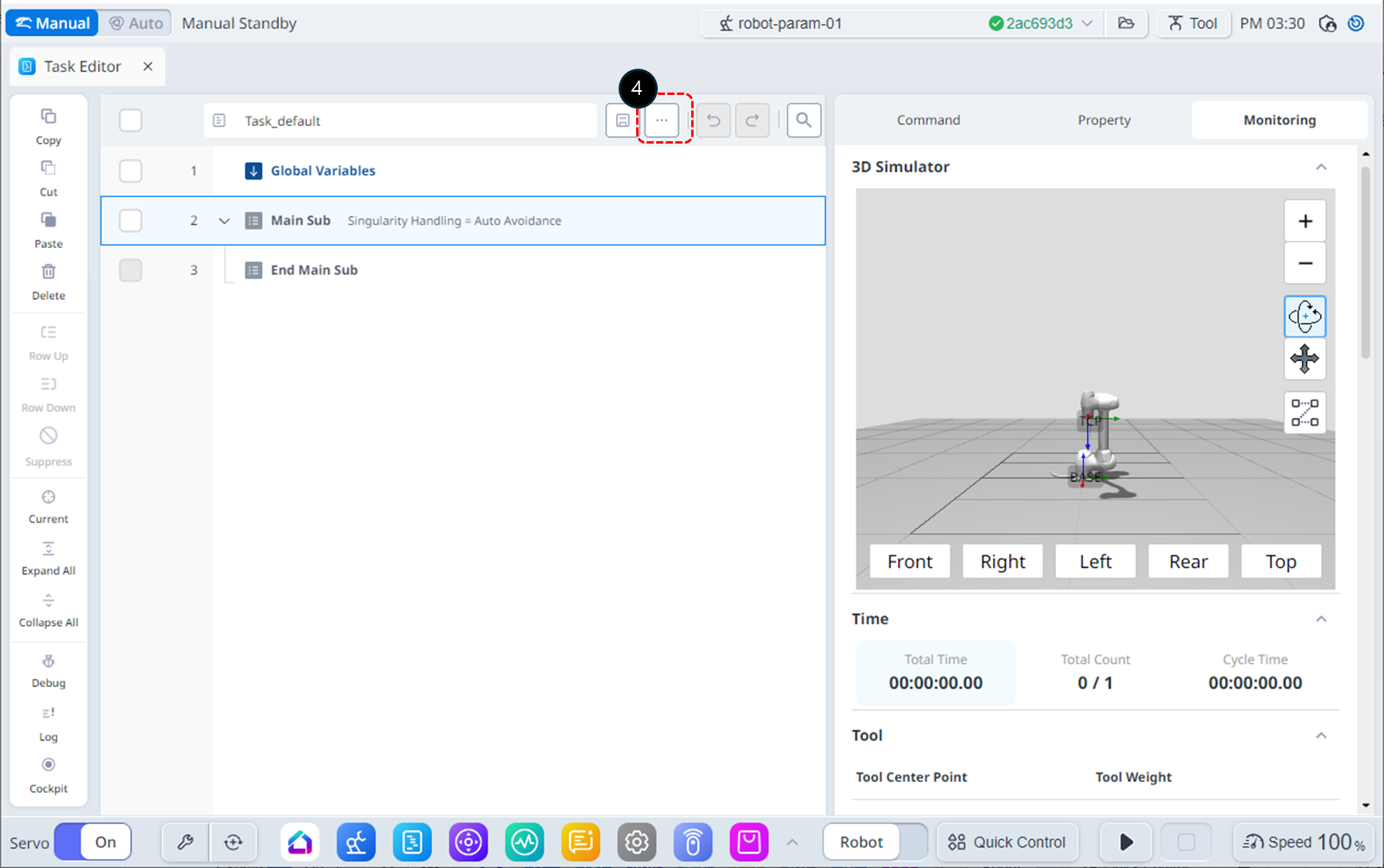
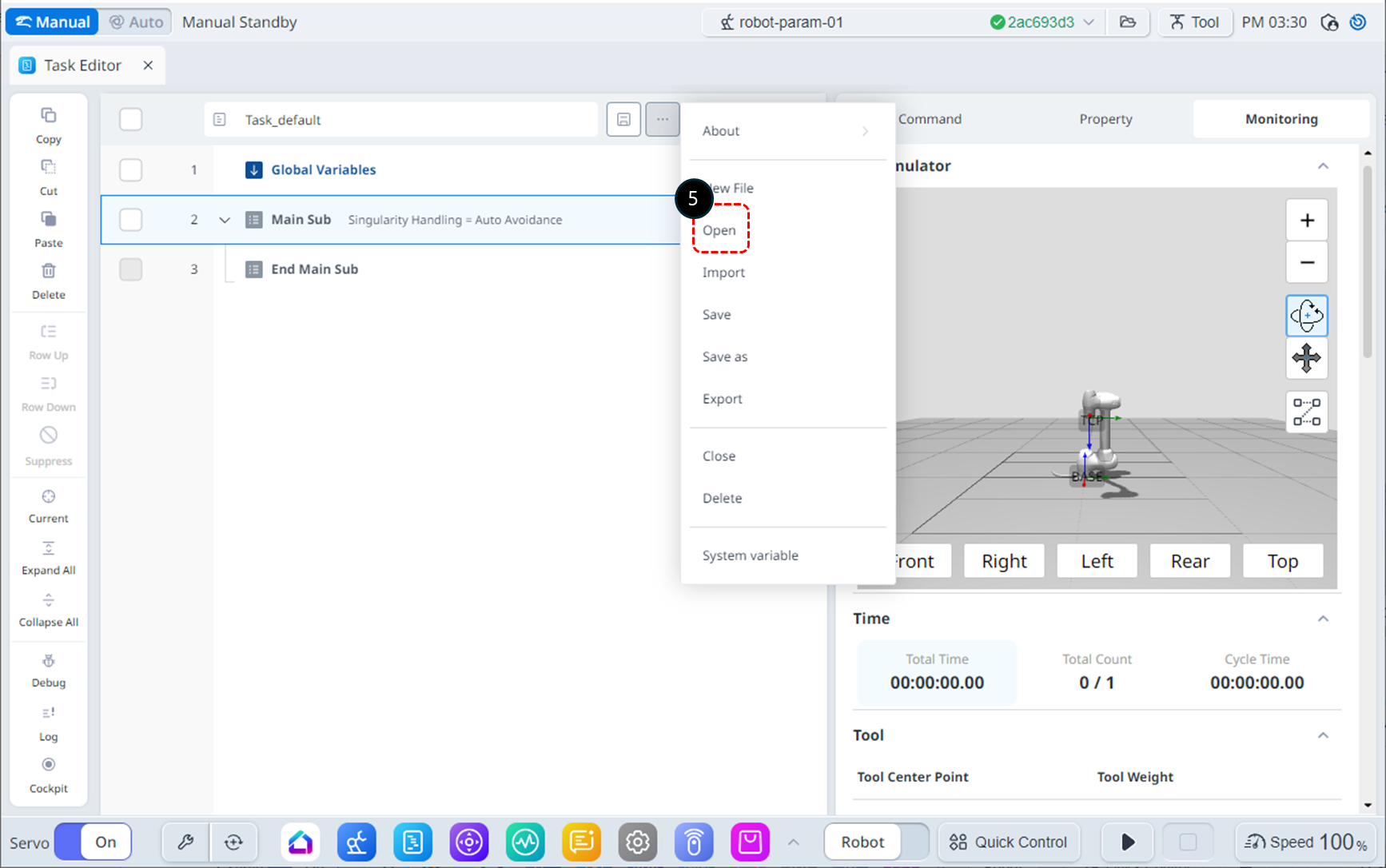
Fare clic sul pulsante file.
-
Fare clic sul pulsante Apri.
-
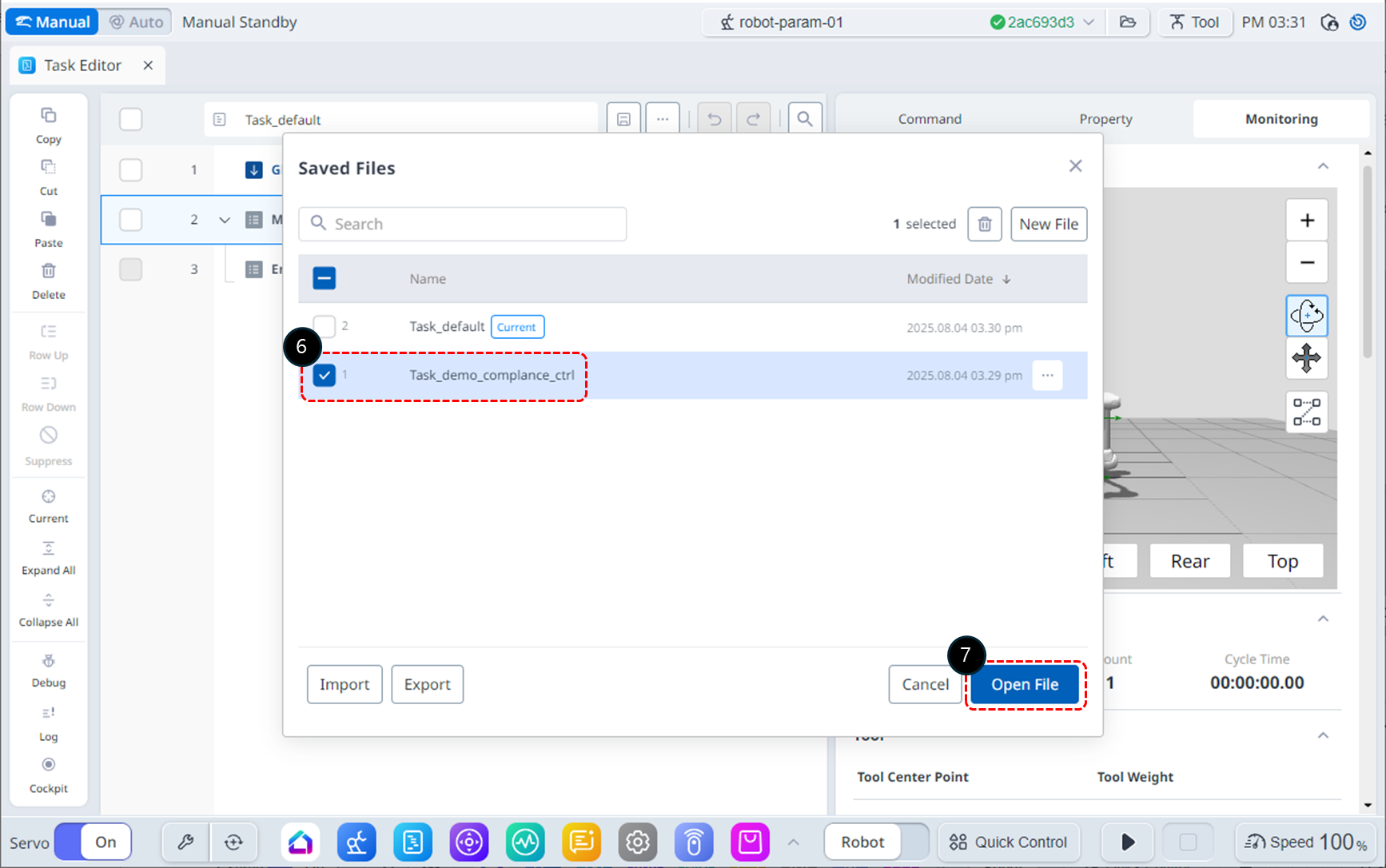
Selezionare il file Task_demo_compliance_ctrl creato negli esempi di comando prova conformità.
-
Fare clic sul pulsante Apri file.
-
Rinominare il file in Task_demo_force_ctrl.
-
Fare clic sul pulsante Salva per salvare il nome del file.
-
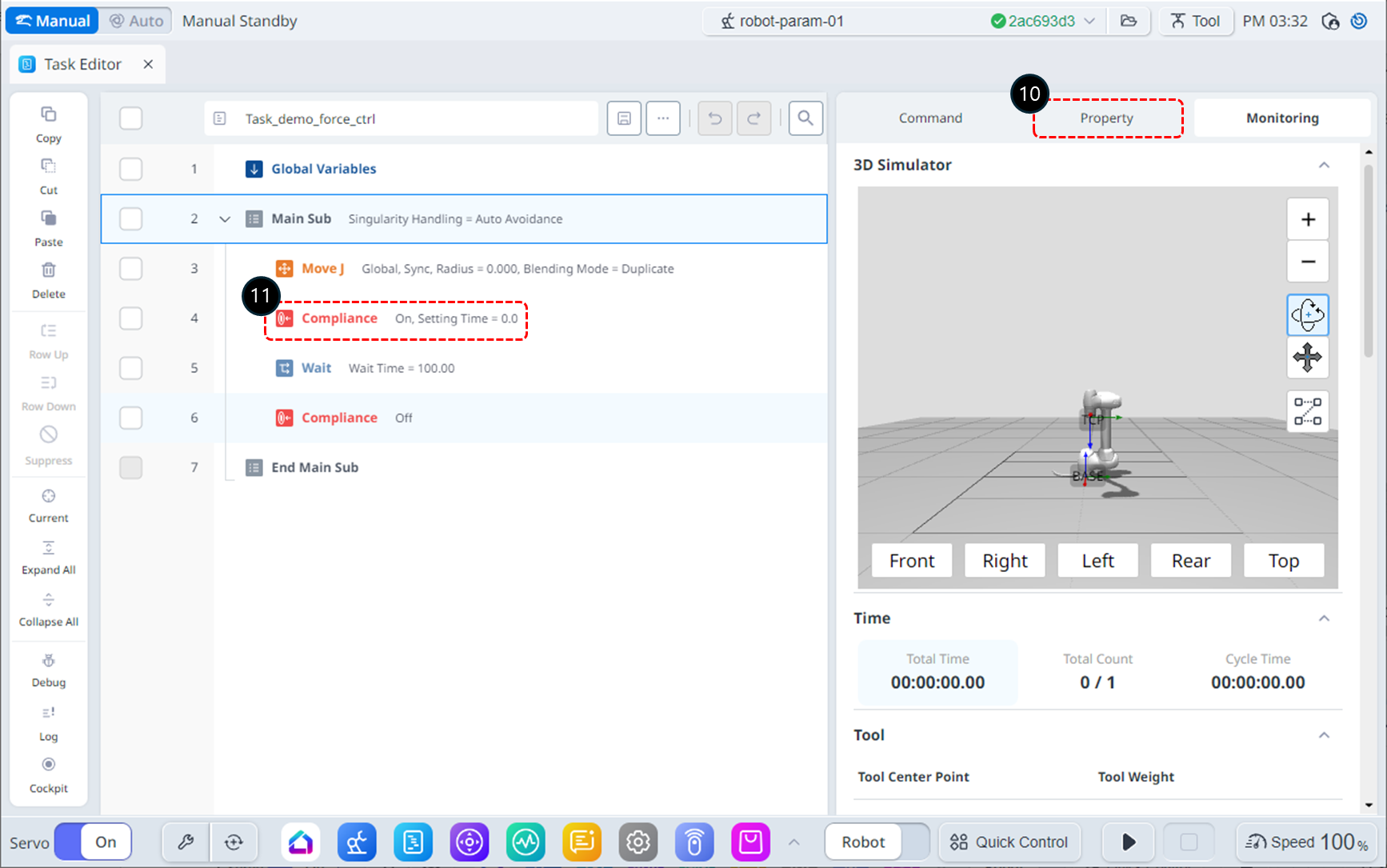
Selezionare la scheda Proprietà.
-
Scegliere il comando Compliance (conformità) sulla quarta riga.
-
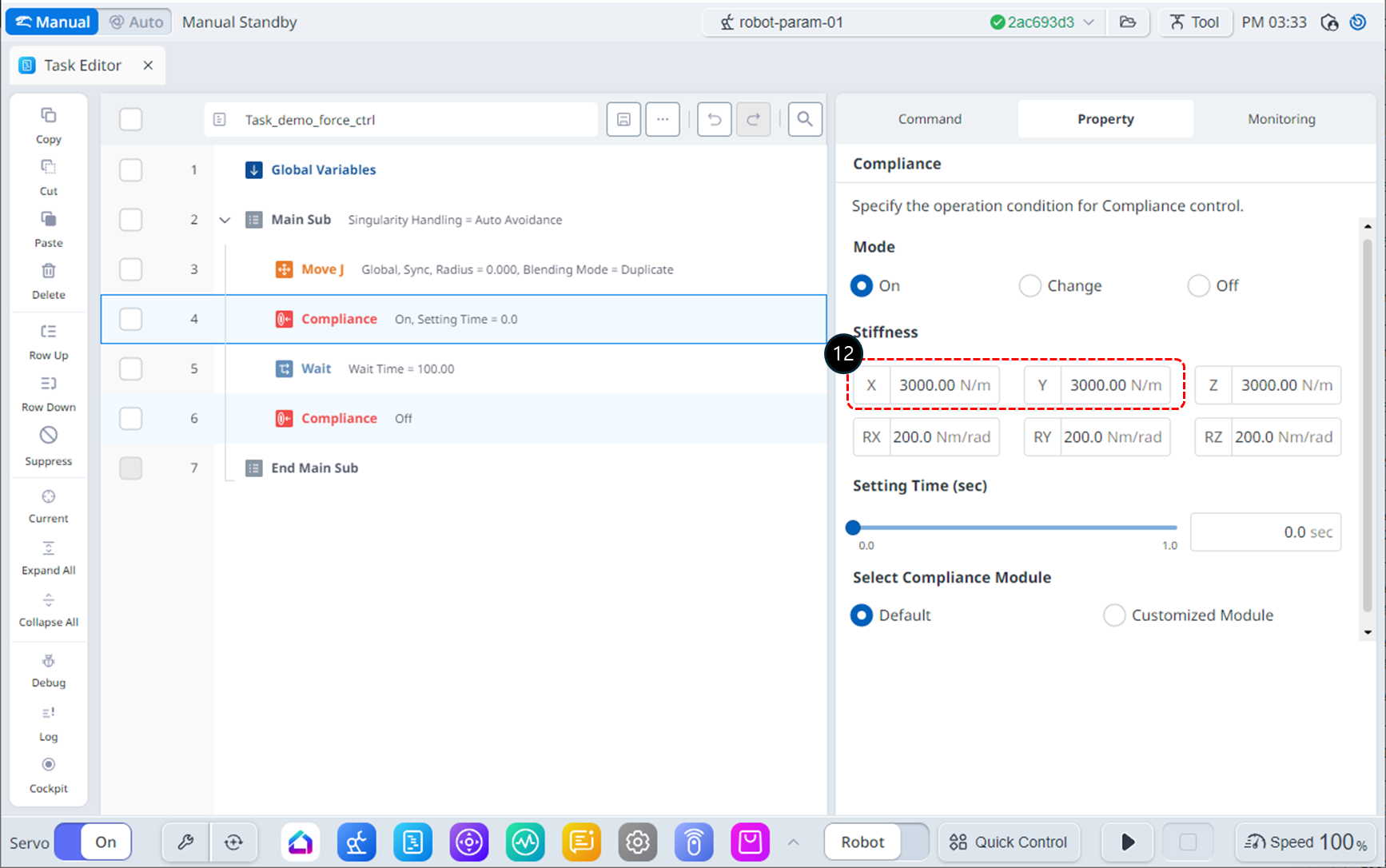
Impostare rigidità sui valori di default come segue.
-
X, Y, Z : 3000 N/m (impostazione predefinita)
-
Rx, Ry, Rz: 200 Nm/rad (impostazione predefinita)
-
-
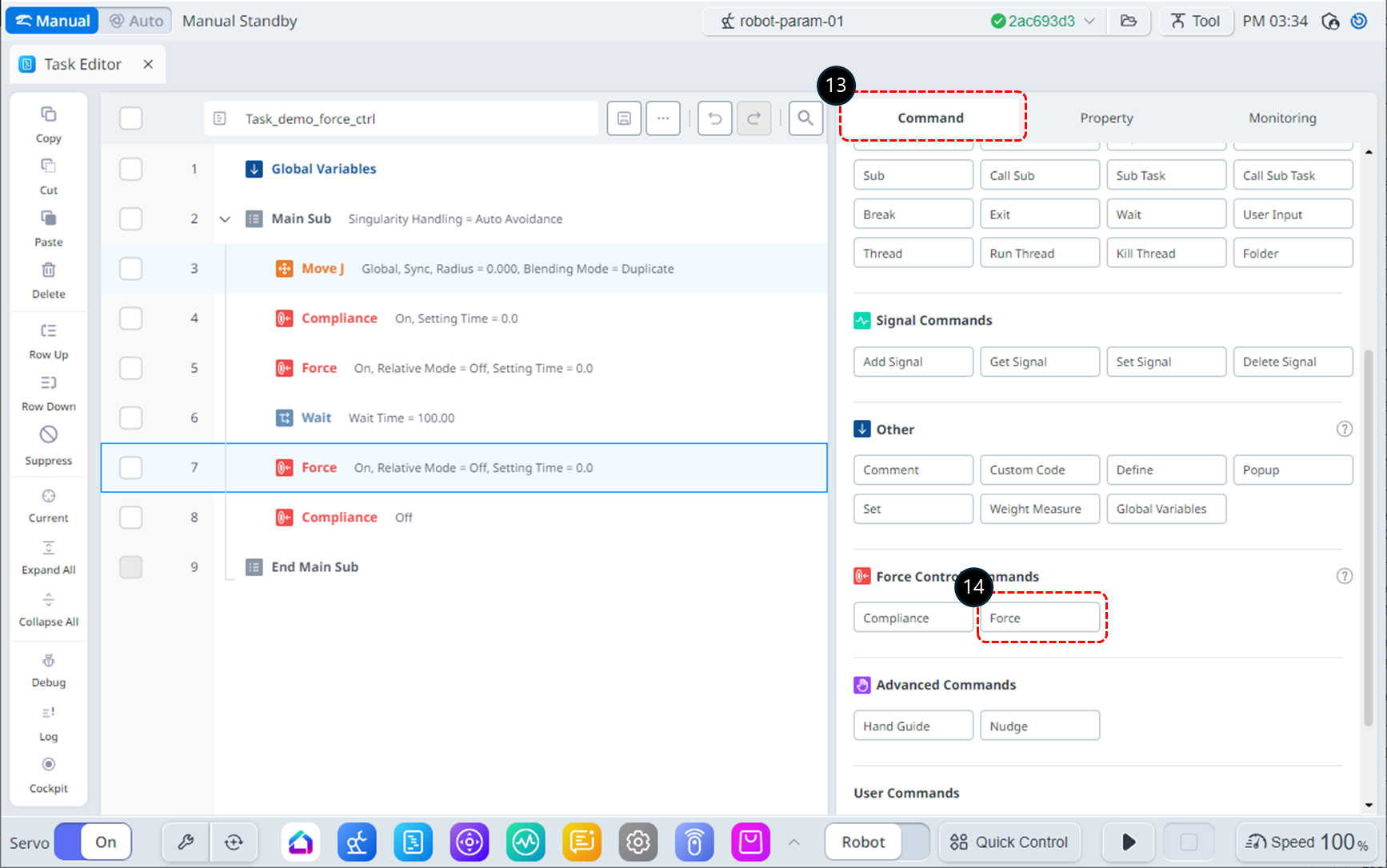
Selezionare la scheda comando.
-
Aggiungere un comando forza alle linee 5a e 7a. Questi comandi verranno utilizzati per attivare e disattivare il controllo della forza.
-
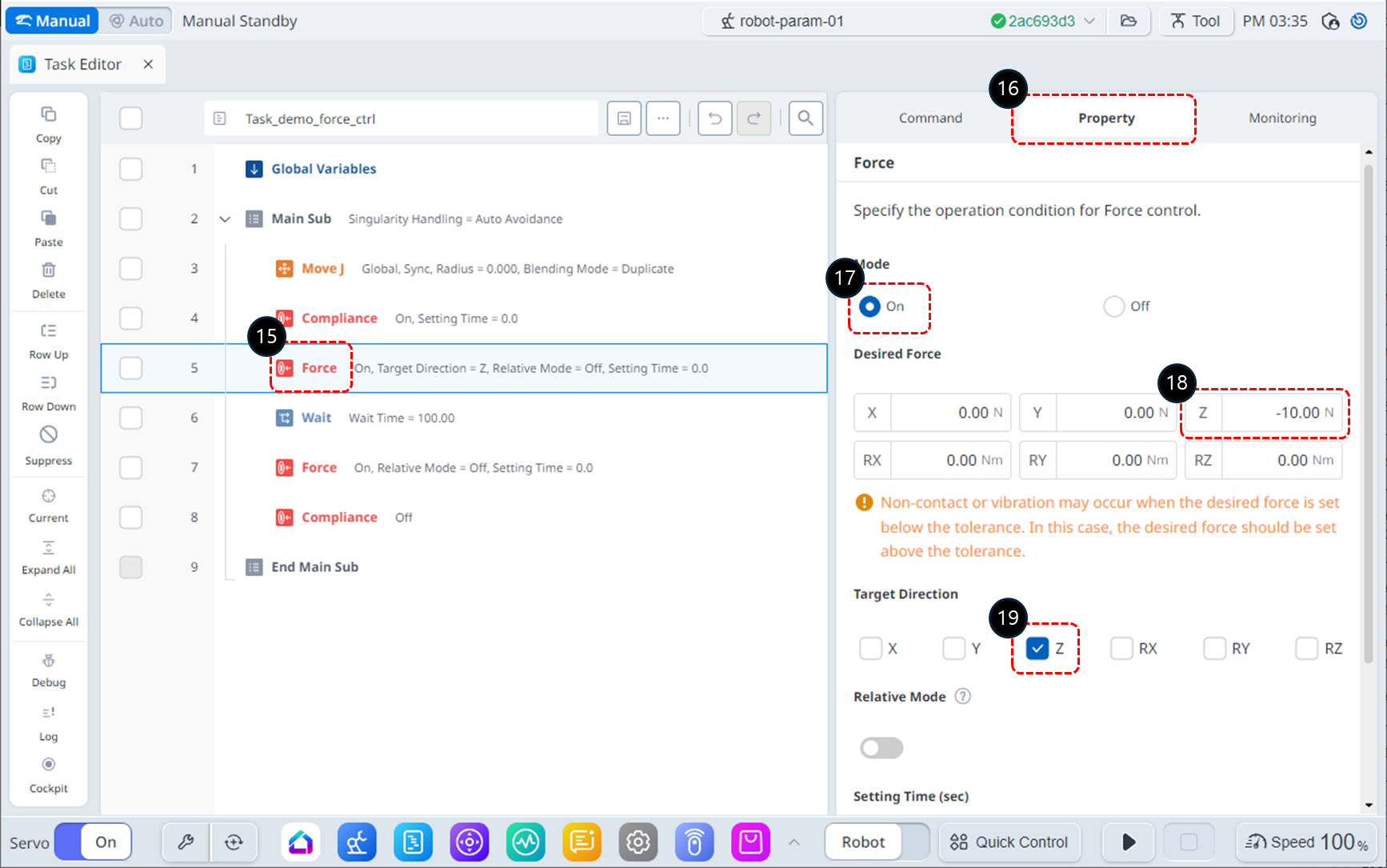
Selezionare il comando forza sulla quinta riga.
-
Andare alla scheda Proprietà.
-
Impostare la modalità come segue: La modalità attiva attiva il controllo della forza.
-
Modalità: Acceso
-
-
Impostare la forza desiderata come segue.
-
X : 0 N (impostazione predefinita)
-
Y : 0 N (impostazione predefinita)
-
Z : -10 N.
-
Rx, Ry, Rz: 0 Nm/rad (impostazione predefinita)
-
-
In direzione di destinazione, selezionare solo l'asse z.
-
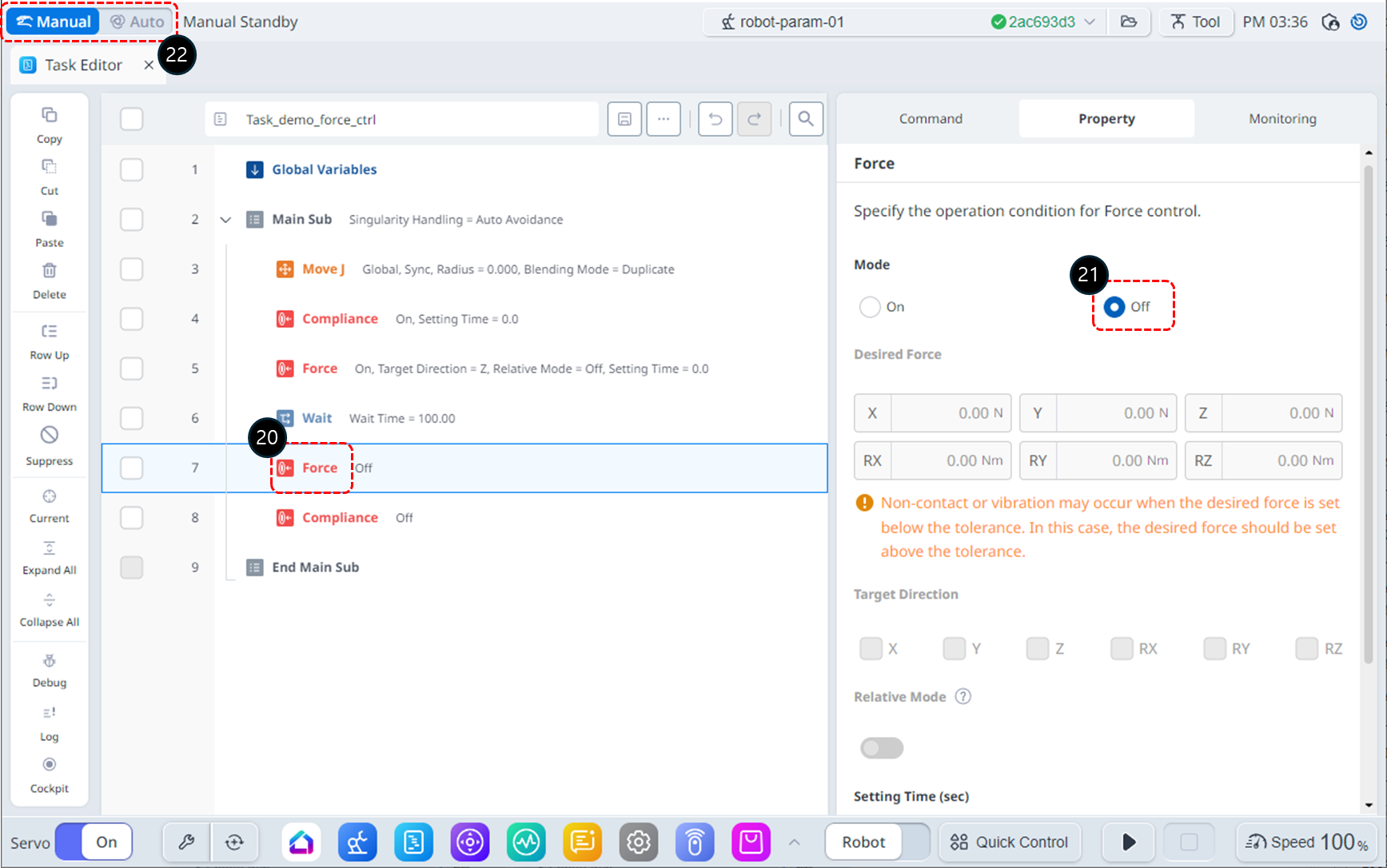
Nel Task List (elenco operazioni), selezionare il comando Force (forza) sulla riga 7.
-
Impostare la modalità come segue: La modalità disattivata disattiva il controllo della forza.
-
Modalità: Spento
-
-
Impostare la modalità operativa su Auto. La scheda Proprietà passa automaticamente alla scheda monitoraggio.
Unknown Attachment
-
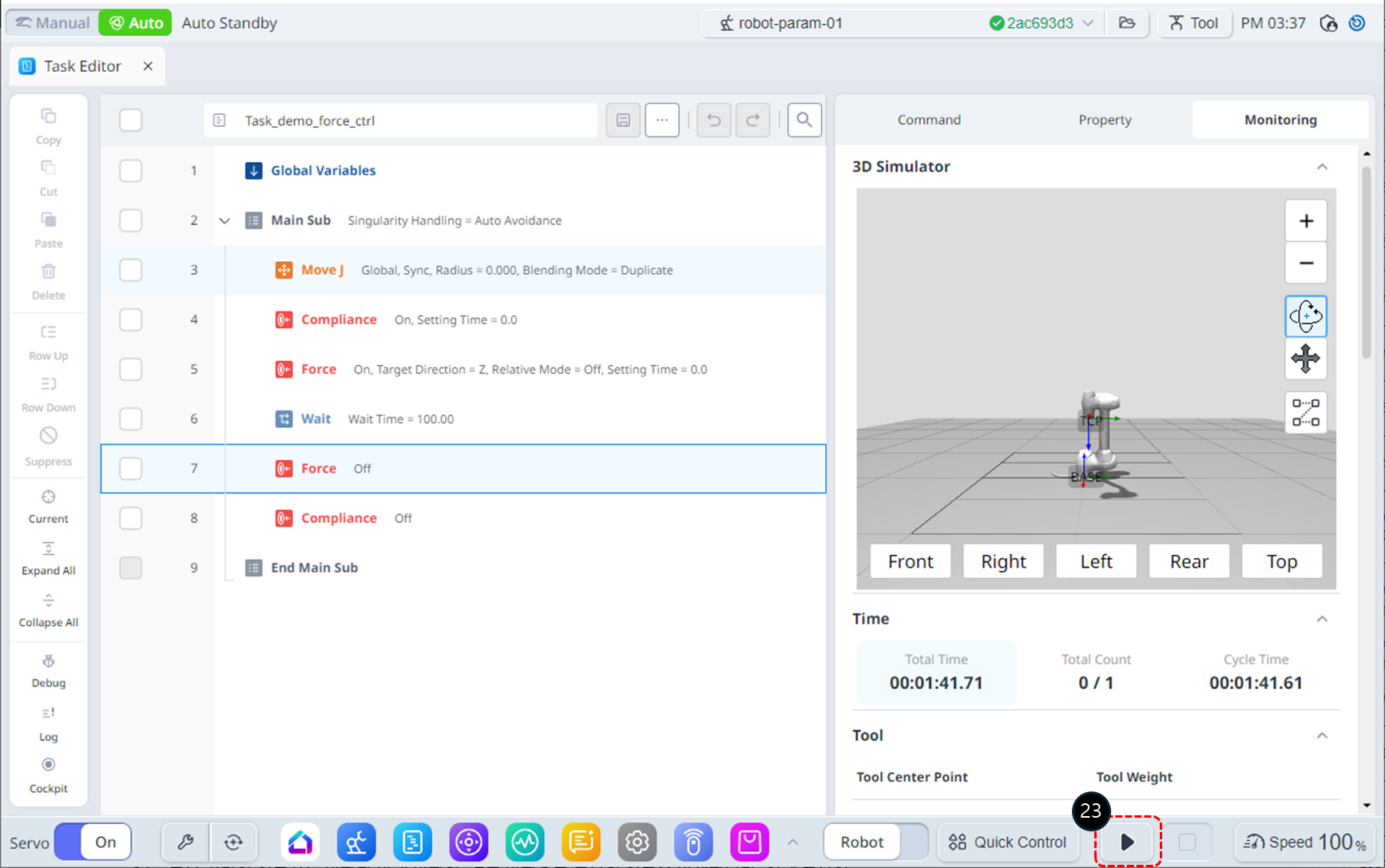
Fare clic sul pulsante Esegui. Nello stato di attesa, il robot funziona come segue:
-
Una forza di -10N viene applicata all'attuatore finale del robot, facendo muovere lentamente il robot nella direzione -Z.
-
Applicare una forza di contrasto in direzione +Z, in opposizione al movimento del robot. Quando la forza applicata dal robot e la forza opposta sono bilanciate, il robot sembra mantenere la sua posizione come se fosse fermo.
-
Se al robot viene applicata una forza superiore a +10N, si sposterà nella direzione della forza applicata.
-
-
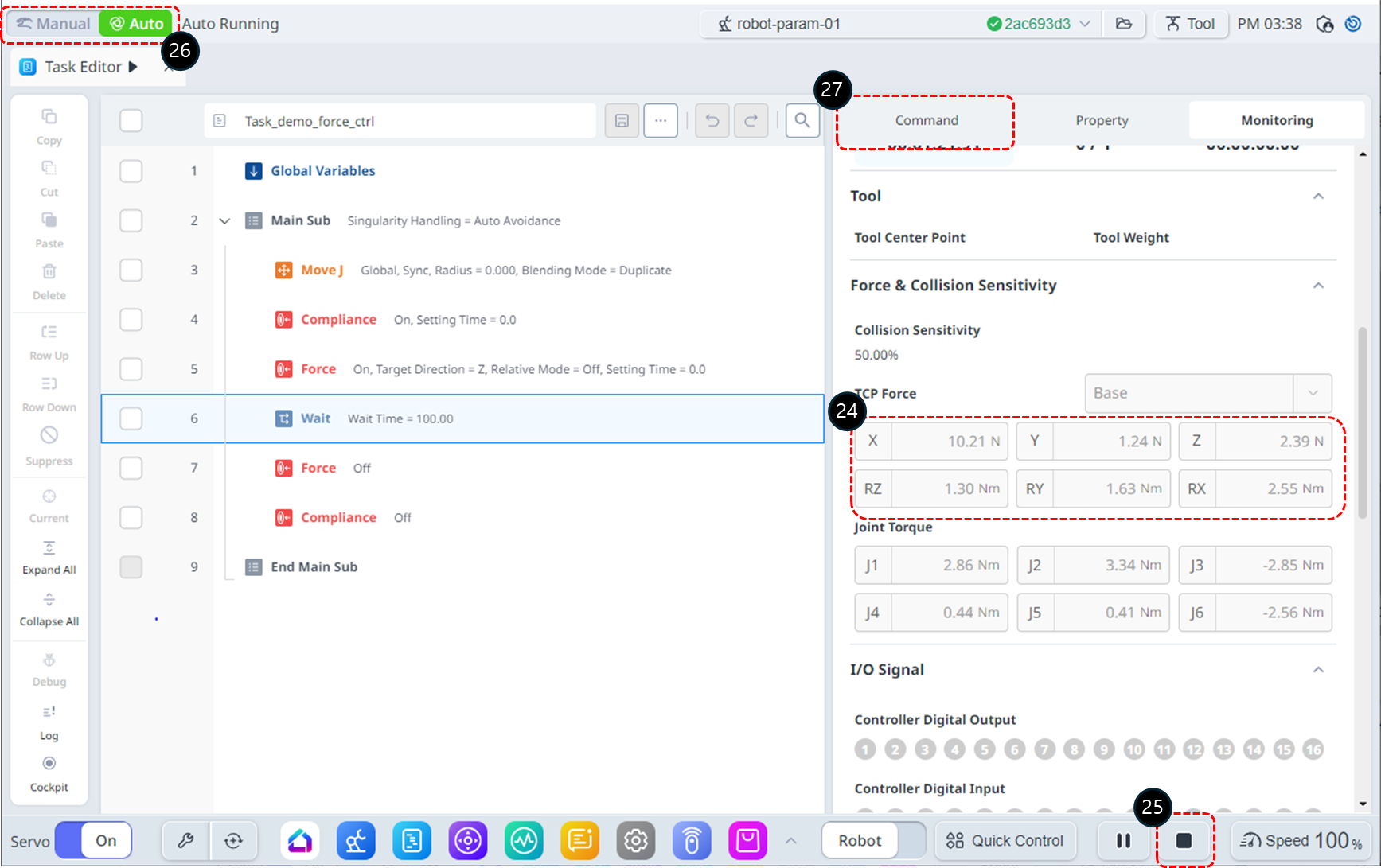
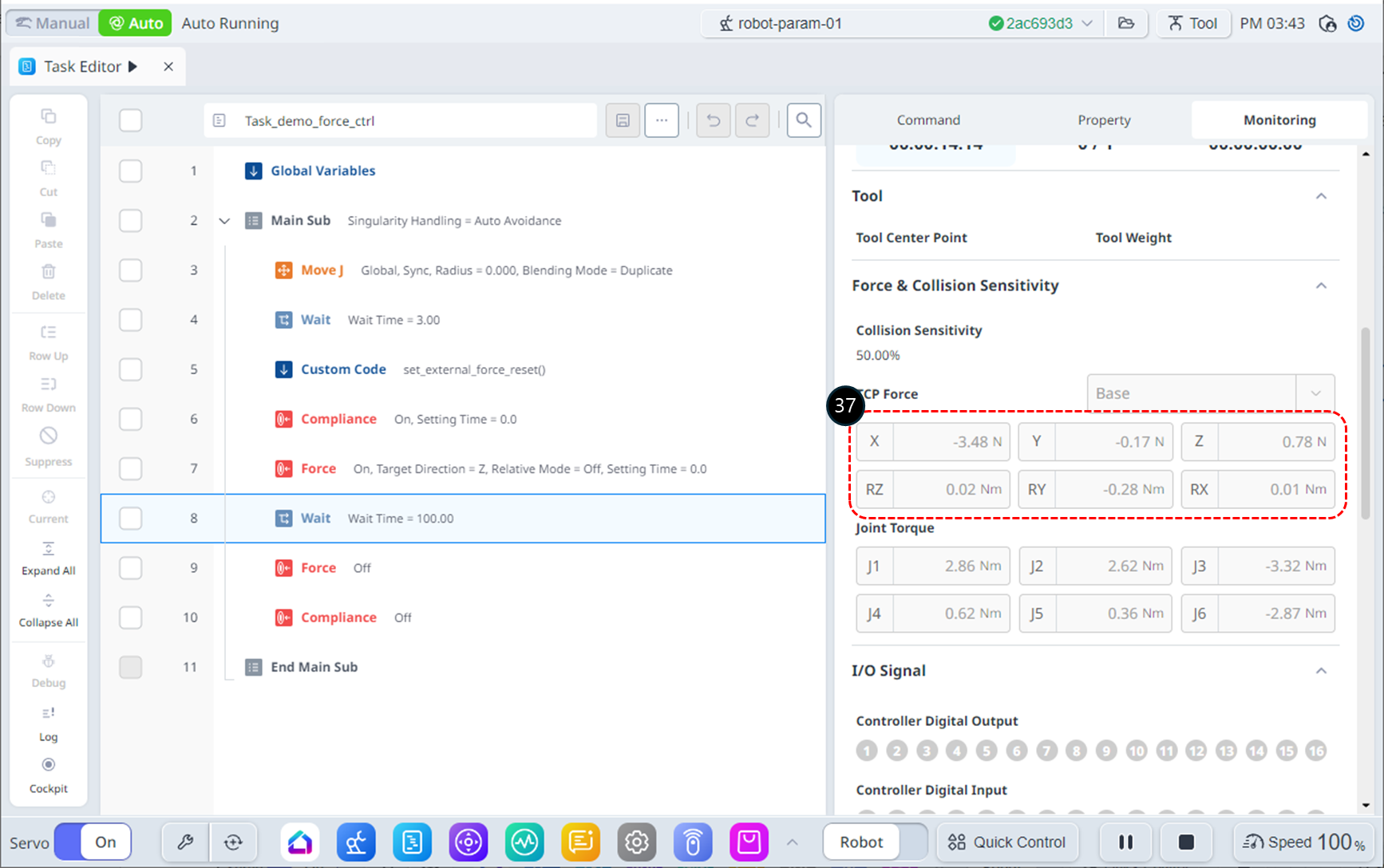
Durante il funzionamento, è possibile monitorare la forza TCP in tempo reale nella sezione forza TCP della scheda monitoraggio. Se non viene applicata alcuna forza all'effettore finale del robot, i valori della forza TCP dovrebbero essere tutti 0, ma è possibile che vengano visualizzati componenti di errore. Di seguito è riportata un'ulteriore spiegazione per risolvere questo problema.
-
Fare clic sul pulsante Arresta per terminare l'attività.
-
Impostare la modalità operativa su Manuale per la modifica dell'attività.
-
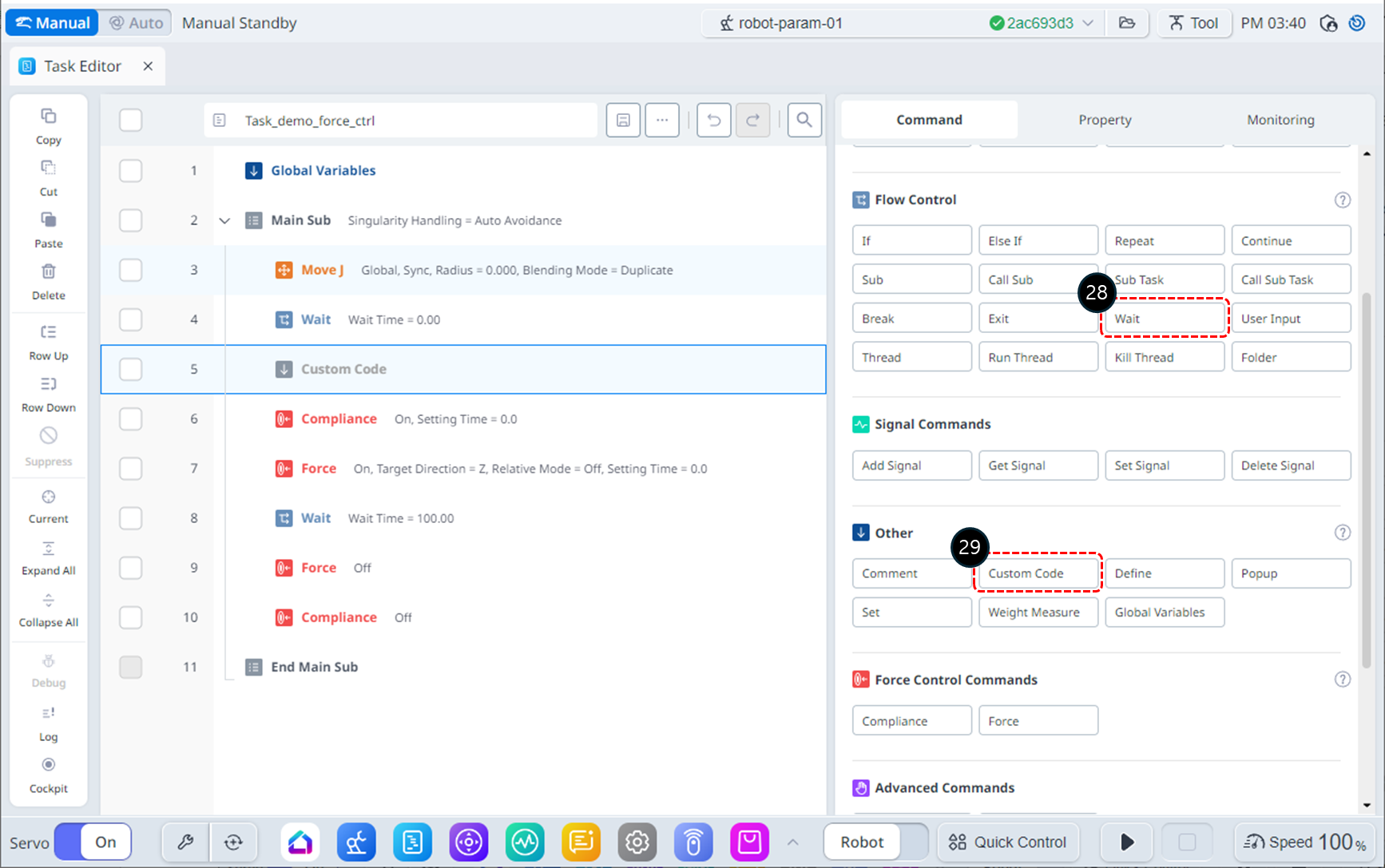
Selezionare la scheda comando.
-
Aggiungere un comando di attesa alla riga 4 dell'elenco operazioni.
-
Aggiungere un comando codice personalizzato alla riga 5 dell'elenco attività.
-
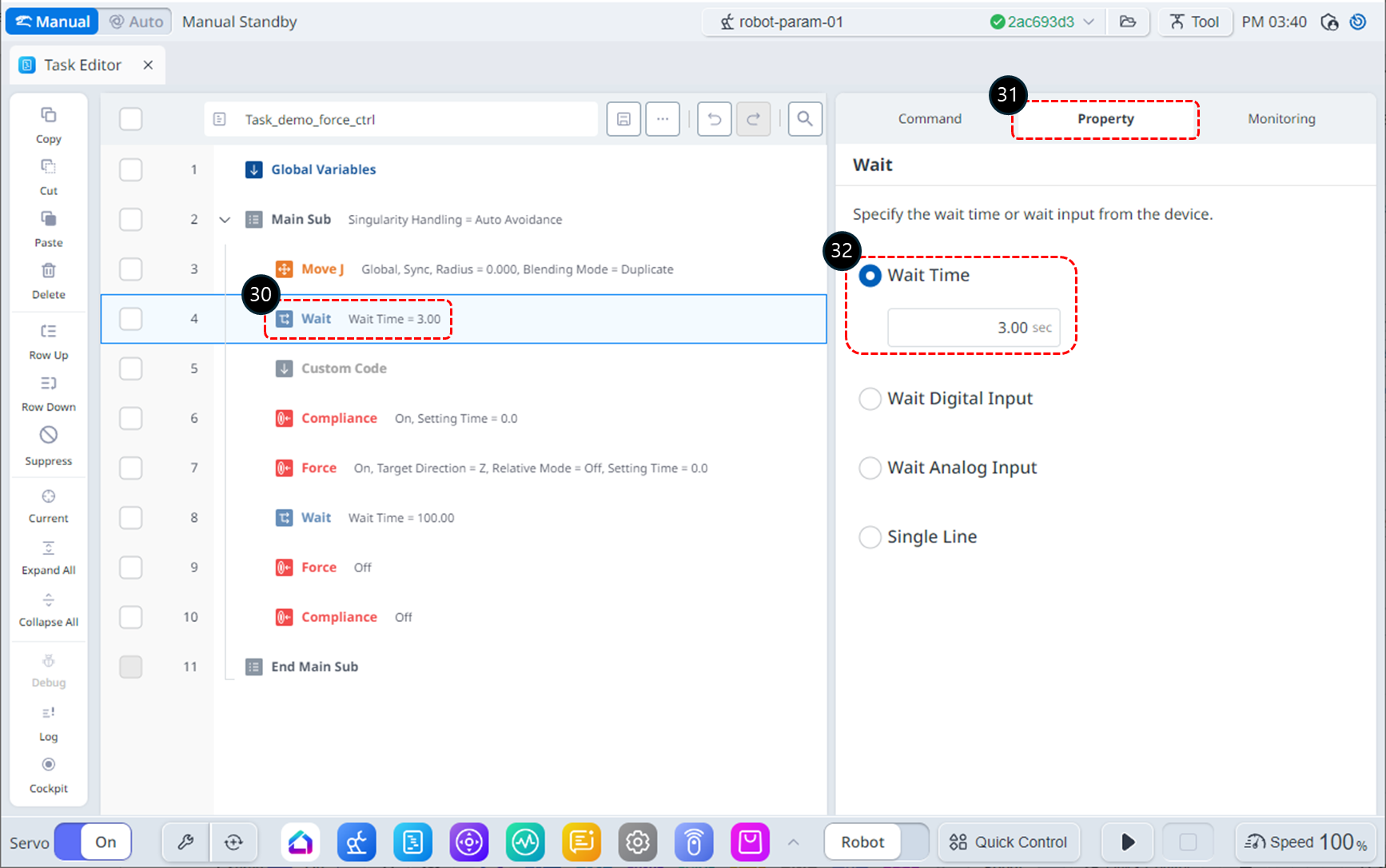
Selezionare il comando Wait (attesa) sulla riga 4.
-
Selezionare la scheda Proprietà.
-
Impostare il tempo di attesa come indicato di seguito.
-
Tempo di attesa: 3 sec.
-
-
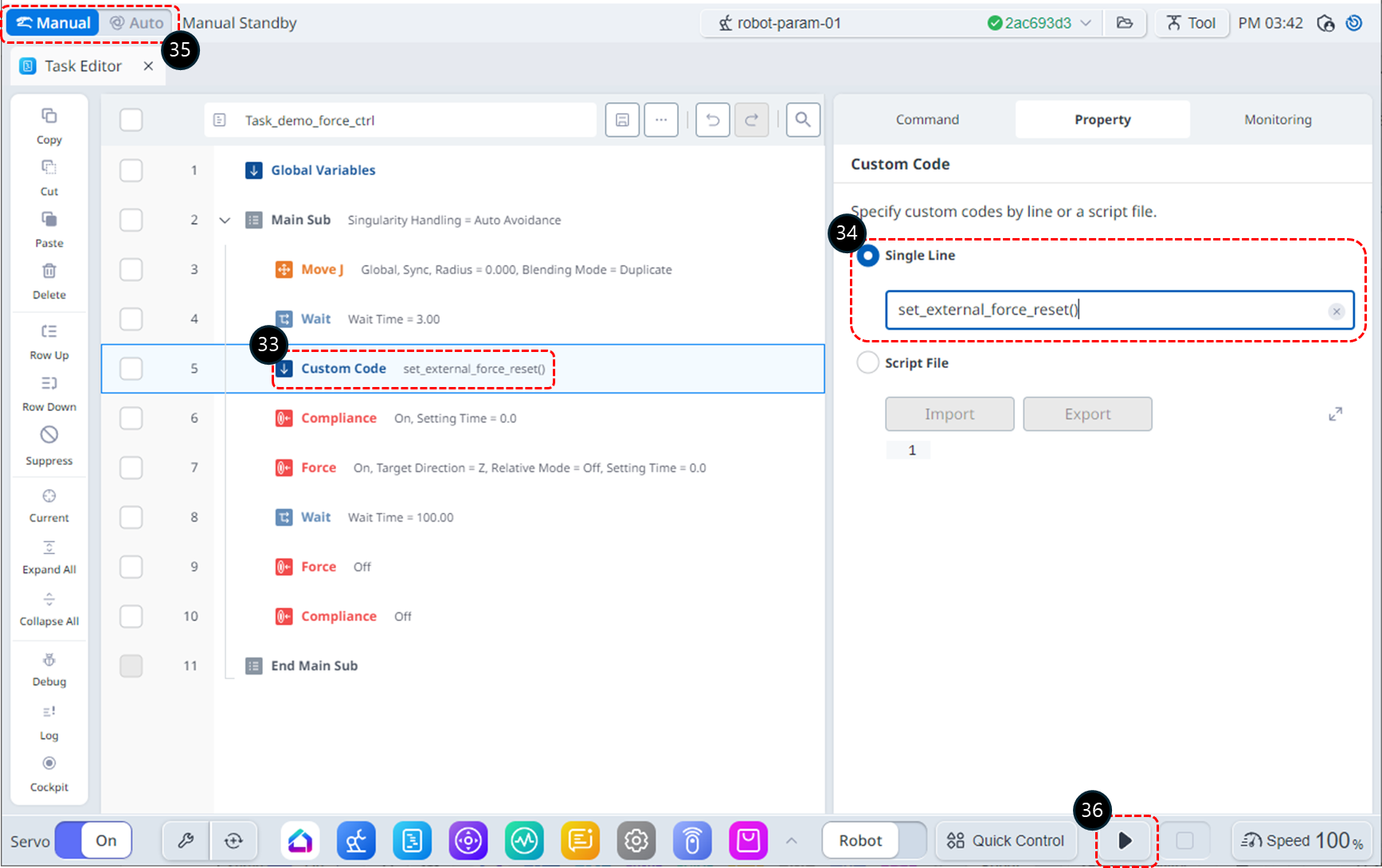
Selezionare il comando codice personalizzato sulla riga 5.
-
Scegliere riga singola e aggiungere il seguente comando DRL: Questo comando ripristina i valori del sensore di forza esterno per rimuovere eventuali errori.
-
set_externl_force_reset()
-
-
Impostare la modalità operativa su Auto. La scheda Proprietà passa automaticamente alla scheda monitoraggio.
-
Fare clic sul pulsante Esegui.
-
Nella scheda Monitoring (monitoraggio), controllare i valori della forza TCP. Si noterà che l'errore è stato ridotto rispetto a prima di utilizzare il comando set_external_force_reset().