Il coperchio della flangia terminale del robot è dotato di due connettori a 8 pin con specifica M8 e fare riferimento alla figura riportata di seguito per la posizione e la forma.
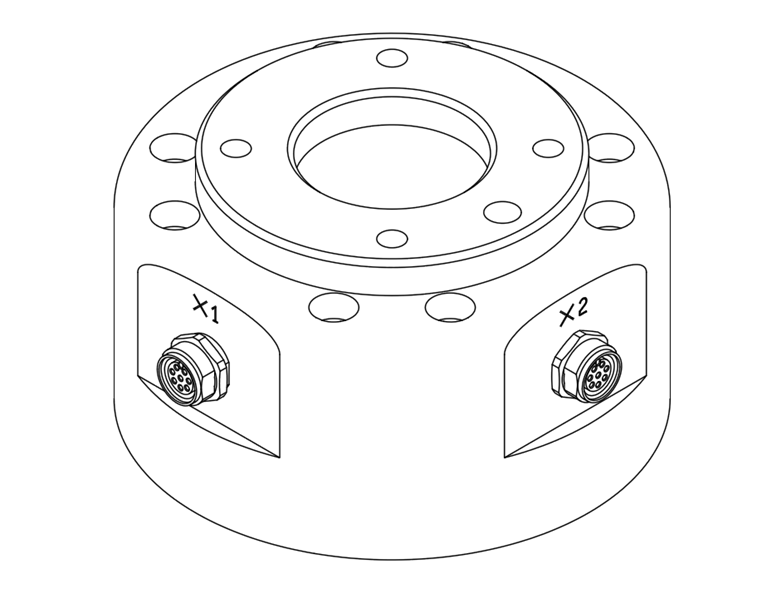
Il connettore fornisce l'alimentazione e i segnali di controllo necessari per azionare la pinza o i sensori incorporati in attrezzi robotizzati specifici. Di seguito sono riportati i cavi industriali di esempio (è possibile utilizzare cavi equivalenti):
-
Phoenix Contact 1404178, maschio (diritto)
-
Phoenix Contact 1404182, maschio (ad angolo retto)
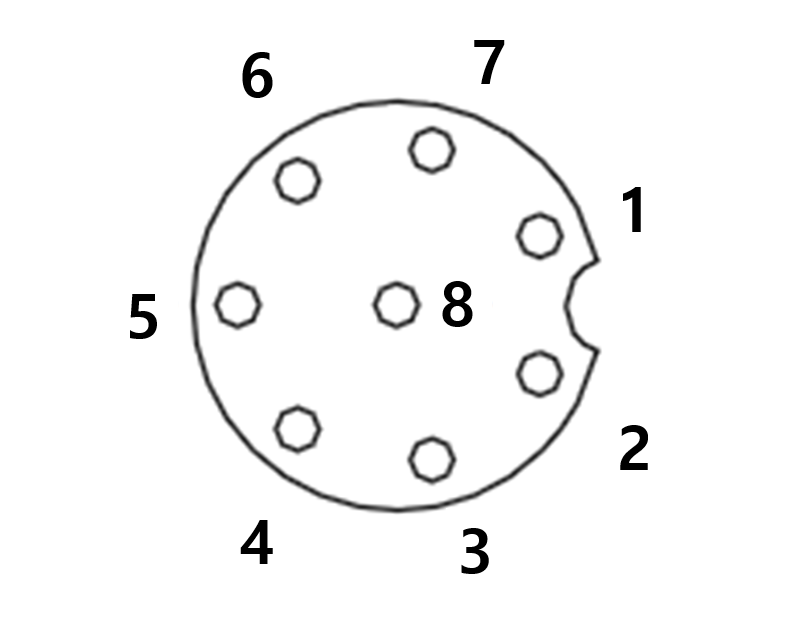
Diagramma schematico
La mappa dei pin di ciascun connettore è la seguente:
Le funzioni i/o fornite tramite i connettori X1 e X2 sono diverse l'una dall'altra e fare riferimento alla tabella riportata di seguito per le impostazioni i/O.
Impostazione X1
|
No |
Tipo di segnale |
Descrizione |
|---|---|---|
|
1 |
Ingresso digitale 1 |
PNP (tipo sorgente, predefinito) |
|
2 |
Uscita digitale 1 |
Impostato su PNP (tipo sorgente, predefinito) o NPN (tipo di dissipatore) |
|
3 |
Uscita digitale 2 |
Impostato su PNP (tipo sorgente, predefinito) o NPN (tipo di dissipatore) |
|
4 |
Ingresso analogico 1 / RS-485 + |
Impostare su tensione (0-10 V) o corrente (4-20 ma, impostazione predefinita) / |
|
5 |
Potenza |
Impostare l'alimentazione interna su +24V (impostazione predefinita), +12V o 0V |
|
6 |
Ingresso analogico 2 / RS-485 - |
Impostare su tensione (0-10 V) o corrente (4-20 ma, impostazione predefinita) / |
|
7 |
Ingresso digitale 2 |
PNP (tipo sorgente, predefinito) |
|
8 |
MASSA |
|
Impostazione x2
|
No |
Tipo di segnale |
Descrizione |
|---|---|---|
|
1 |
Ingresso digitale 3 |
PNP (tipo sorgente, predefinito) |
|
2 |
Uscita digitale 3 |
Impostato su PNP (tipo sorgente, predefinito) o NPN (tipo di dissipatore) |
|
3 |
Uscita digitale 4 |
Impostato su PNP (tipo sorgente, predefinito) o NPN (tipo di dissipatore) |
|
4 |
Ingresso analogico 3 / RS-485 + |
Impostare su tensione (0-10 V) o corrente (4-20 ma, impostazione predefinita) / velocità di trasmissione max 1M |
|
5 |
Potenza |
Impostare l'alimentazione interna su +24V (impostazione predefinita), +12V o 0V |
|
6 |
Ingresso analogico 4 / RS-485 - |
Impostare su tensione (0-10 V) o corrente (4-20 ma, impostazione predefinita) / velocità di trasmissione max 1M |
|
7 |
Ingresso digitale 4 |
PNP (tipo sorgente, predefinito) |
|
8 |
MASSA |
|
La potenza iniziale di ingresso/uscita (i/o) della flangia è impostata su 24 V e può essere impostata su 0 V o 12 V.
Fare riferimento alla tabella riportata di seguito per le specifiche di alimentazione dettagliate durante il collegamento i/O.
|
Parametro |
Min |
Tipo |
Max |
Unità |
|---|---|---|---|---|
|
Tensione di alimentazione (modalità 12 V) |
11,4 |
12 |
12,6 |
V |
|
Tensione di alimentazione (modalità 24 V) |
22,8 |
24 |
25,2 |
V |
|
Corrente di alimentazione |
- |
- |
3 |
A. |
Avvertenza
-
Posizionare l'attrezzo e la pinza in modo che non causino pericoli quando l'alimentazione viene interrotta.
(ad esempio, il pezzo che cade dall'utensile) -
Il terminale N. 5 di ciascun connettore emette sempre 24 V mentre il robot è alimentato, quindi assicurarsi di interrompere l'alimentazione al robot quando si configura l'utensile e la pinza.
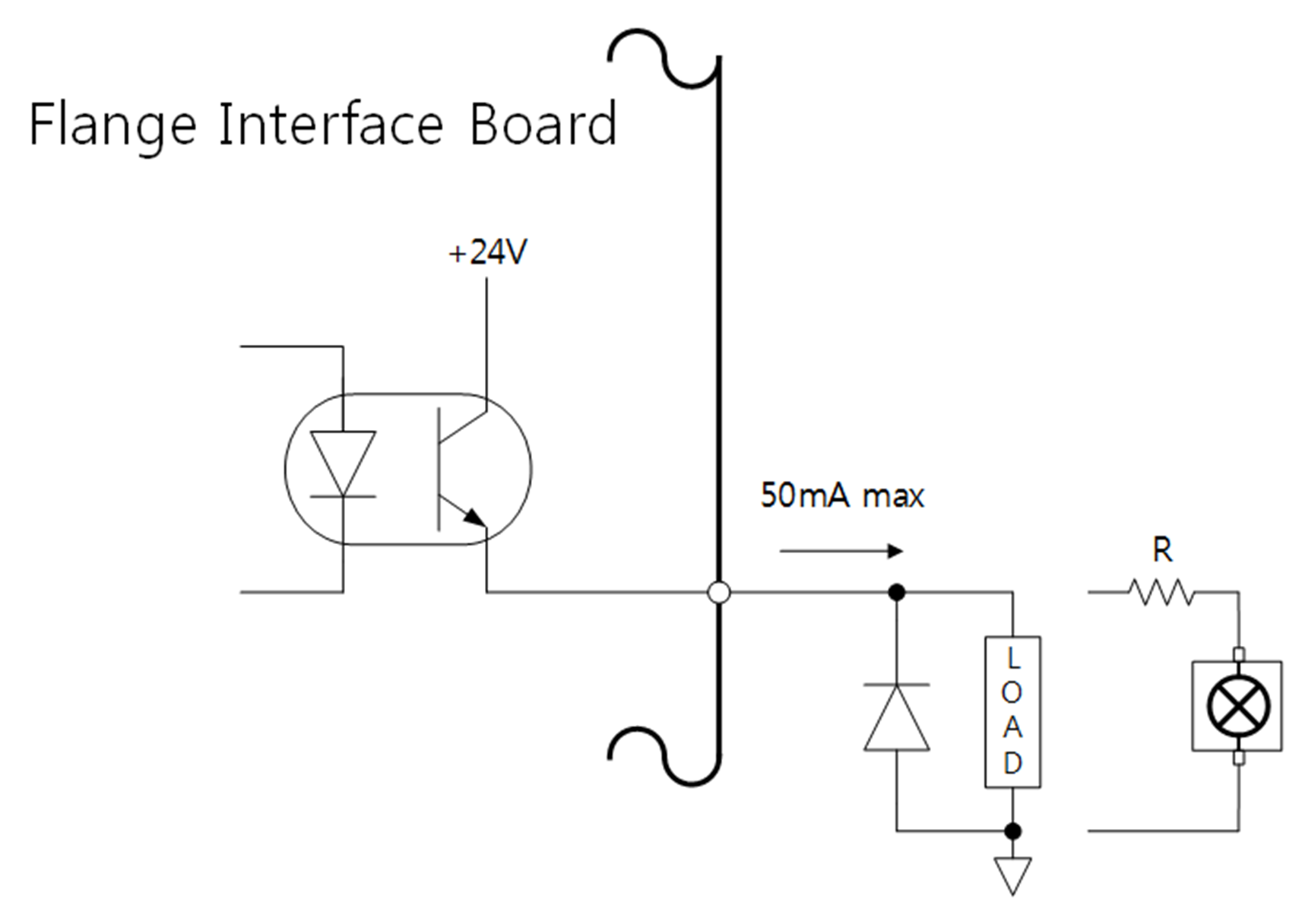
Specifiche uscita digitale flangia
L'uscita digitale della flangia è una specifica PNP e l'uscita del fotoaccoppiatore è impostata nell'uscita.
Il canale di uscita corrispondente diventa +24V quando viene attivata l'uscita digitale. Quando l'uscita digitale è disabilitata, lo stato del canale di uscita corrispondente è aperto (flottante).
Le specifiche elettriche dell'uscita digitale sono le seguenti:
|
Parametro |
Min |
Tipo |
Max |
Unità |
|---|---|---|---|---|
|
Tensione durante l'azionamento di 10 ma |
23 |
- |
- |
V |
|
Tensione durante la guida di 50 ma |
22,8 |
- |
23,7 |
V |
|
Corrente durante la guida |
0 |
- |
50 |
Ma |
L'impostazione è stata modificata come segue dall'11 aprile 2024
Le uscite Ou digitali supportano due diverse modalità:
|
Modalità |
Attivo |
Inattivo |
|---|---|---|
|
PNP (tipo sorgente, predefinito) |
Alto |
Aperto |
|
NPN (tipo a lavandino) |
Basso |
Aperto |
La potenza iniziale di ingresso/uscita (i/o) della flangia è impostata su 24 V e può essere impostata su 0 V o 12 V.
Il canale di uscita corrispondente diventa ++12V o ++24V quando l'uscita digitale è attivata.
Quando l'uscita digitale è disabilitata, lo stato del canale di uscita corrispondente è aperto (flottante).
Le specifiche elettriche dell'uscita digitale sono le seguenti:
|
Parametro |
Min |
Tipo |
Max |
Unità |
|---|---|---|---|---|
|
Tensione durante la guida in modalità 12 V. |
11,4 |
12 |
12,6 |
V |
|
Tensione durante la guida in modalità 24 V. |
22,8 |
24 |
25,2 |
V |
|
Corrente durante la guida |
0 |
- |
50 |
Ma |
Attenzione
-
L'uscita digitale non è soggetta a limitazioni di corrente. Il mancato rispetto delle specifiche sopra indicate durante il funzionamento può causare danni permanenti al prodotto.
-
La figura riportata di seguito è un esempio di configurazione di un'uscita digitale, quindi fare riferimento ad essa durante il collegamento dell'utensile e della pinza.
-
Assicurarsi di scollegare l'alimentazione dal robot durante la configurazione del circuito.
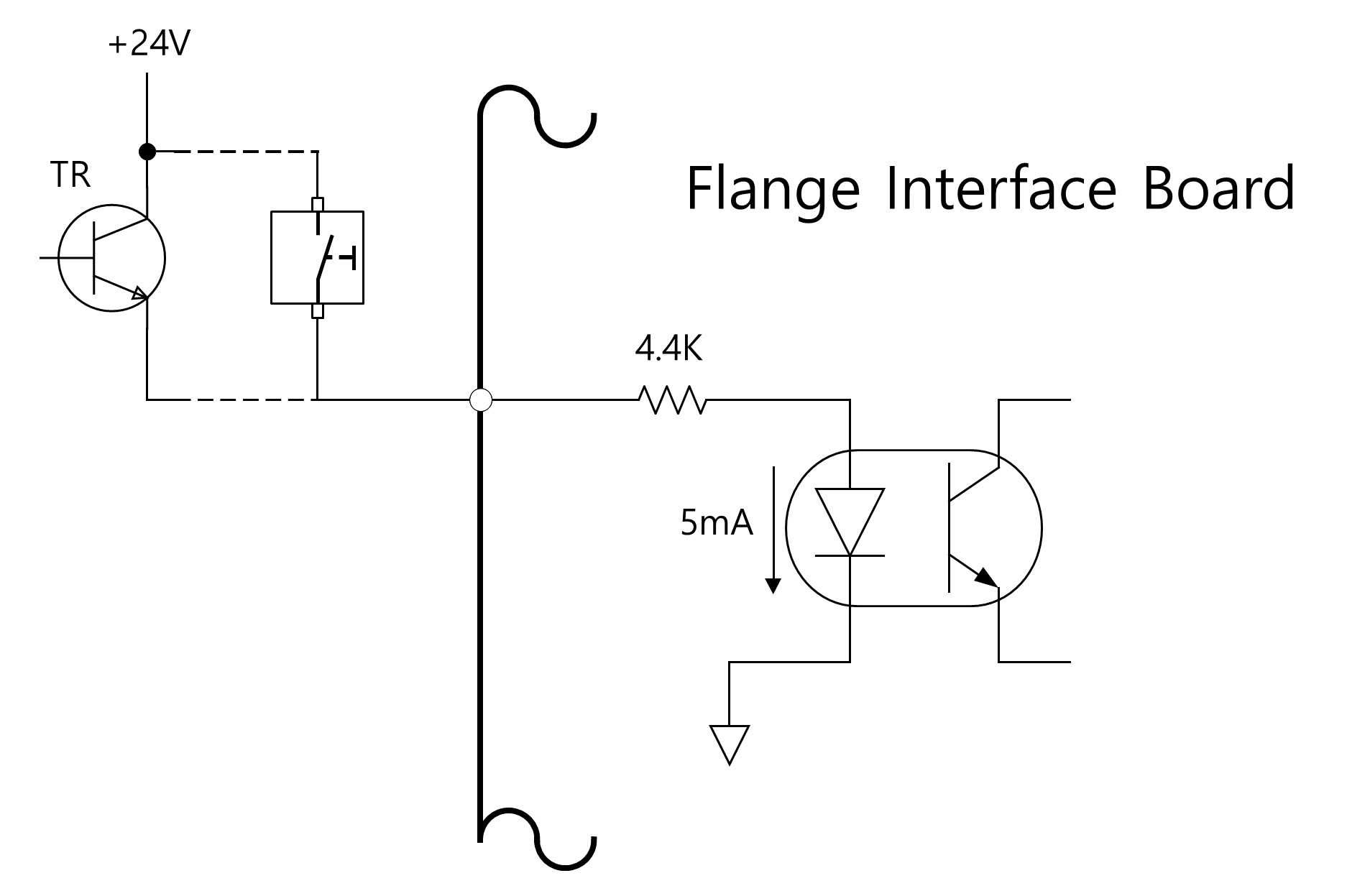
Specifiche ingresso digitale flangia
L'ingresso digitale flangia è dotato di un ingresso accoppiatore fotografico.
La corrente basata sull'ingresso a 24 V è limitata a 5 ma dalla resistenza interna.
Le specifiche elettriche dell'ingresso digitale sono le seguenti:
|
Parametro |
Min |
Tipo |
Max |
Unità |
|---|---|---|---|---|
|
Tensione di ingresso |
0 |
- |
26 |
V |
|
Logico alto |
4,4 |
- |
- |
V |
|
Logicamente basso |
0 |
- |
0,7 |
V |
|
Resistenza in ingresso |
- |
4,4k |
- |
Ω |
Attenzione
-
La figura riportata di seguito è un esempio di configurazione di un ingresso digitale, quindi fare riferimento ad esso durante il collegamento di un dispositivo di input.
-
Assicurarsi di scollegare l'alimentazione dal robot durante la configurazione del circuito.
Specifiche ingresso analogico flangia
Riceve segnali di tensione o corrente da dispositivi esterni.
L'ingresso analogico può essere impostato su tensione (0-10 V) o corrente (4-20 ma).
Le specifiche elettriche sono riportate di seguito.
|
Parametro |
Min |
Tipo |
Max |
Unità |
|---|---|---|---|---|
|
Tensione di ingresso in modalità tensione |
0 |
- |
10 |
V |
|
Corrente di ingresso in modalità corrente |
4 |
- |
20 |
Ma |
|
Risoluzione |
- |
12 |
- |
bit |