Collegare il controller al robot
OBBLIGATORIO FACILE 1 MIN

Collegare il cavo di collegamento del manipolatore ai collegamenti corrispondenti sul controller e montare l'anello elastico per evitare che il cavo si allenti.
-
Collegare l'estremità opposta del cavo del robot al collegamento corrispondente del controller finché non scatta in posizione e assicurarsi che il cavo sia inserito saldamente.
ㅤ
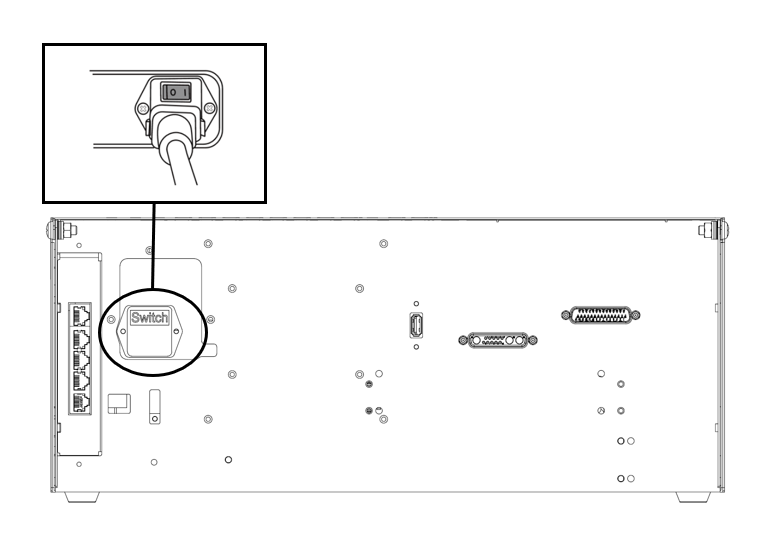
Collegamento dell'alimentazione al controller
OBBLIGATORIO FACILE 1 MIN
Per alimentare il controller, collegare il cavo di alimentazione del controller a una presa di alimentazione IEC standard.
-
Assicurarsi che il robot sia correttamente collegato a terra dopo aver collegato i cavi di alimentazione (collegamenti elettrici a massa).
-
Stabilire una massa comune per tutte le attrezzature del sistema con bulloni non utilizzati correlati al simbolo di massa all'interno della centralina. Il conduttore di terra deve soddisfare la corrente nominale massima del sistema.
-
Per ulteriori informazioni, fare riferimento a collegamento dell'alimentazione al controller.
L'alimentazione deve soddisfare requisiti minimi quali la messa a terra e gli interruttori automatici. Le specifiche elettriche del controller CA in dotazione sono le seguenti:
|
Parametro |
Specifiche |
|---|---|
|
Tensione di ingresso |
100 – 240 V CA |
|
Fusibile di alimentazione in ingresso (a 100-240V) |
15 A |
|
Frequenza di ingresso |
47–63 Hz |
Fare riferimento alla seguente appendice per informazioni sulla centralina opzionale.
Centralina di posizione
OBBLIGATORIO FACILE 1 MIN
Quando si installa il controller sul pavimento, assicurarsi almeno 50 mm di spazio su ciascun lato del controller per consentire la ventilazione.
Attenzione
-
Assicurarsi che i cavi abbiano curvature superiori al raggio di curvatura minimo. Per ulteriori informazioni, vedere posizionamento del cavo.