I terminali i/o del controller possono essere utilizzati per collegare apparecchiature esterne diverse dai manipolatori e teach pendant al controller. Oltre ai dispositivi di sicurezza come l'interruttore di arresto di emergenza, la barriera fotoelettrica e i tappetini di sicurezza, è possibile collegare varie periferiche necessarie per configurare una cella di lavoro robotizzata, come elettrovalvole pneumatiche, relè, PLC e encoder del nastro trasportatore.
L'i/o del controller è organizzato come segue.
-
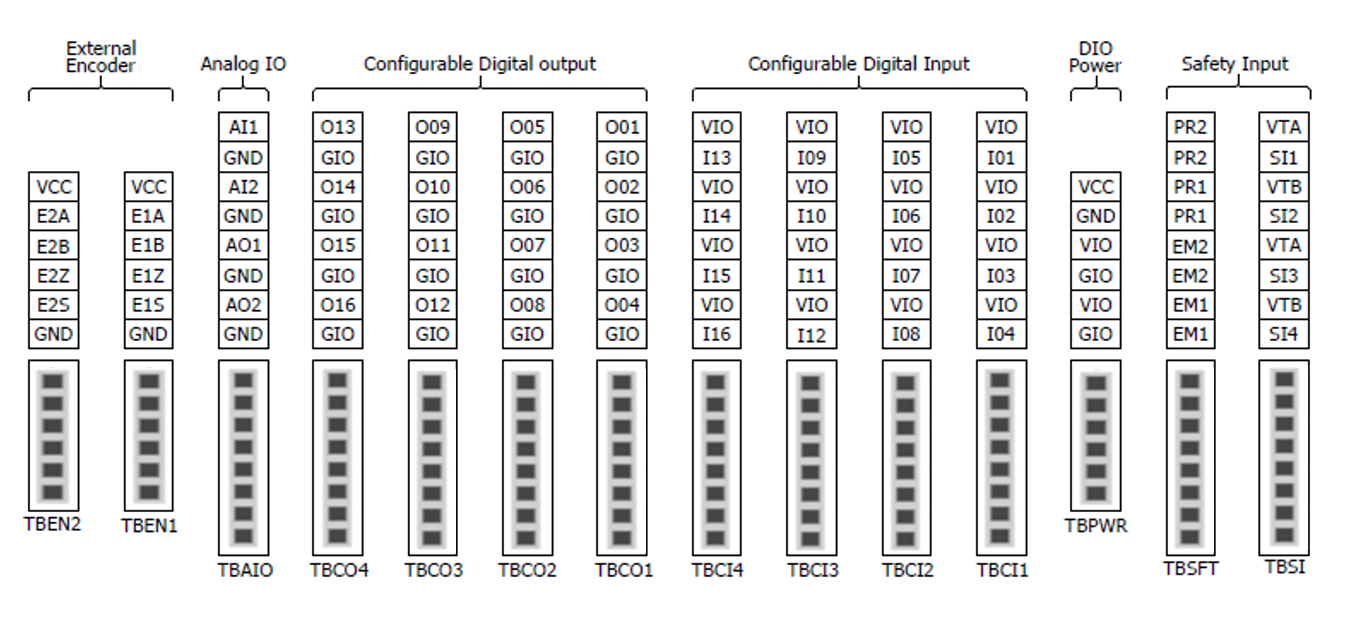
Morsettiera per ingresso contatto di sicurezza (TBSFT): Per il collegamento dei dispositivi necessari per l'arresto di emergenza e l'arresto protettivo
-
Morsettiera di alimentazione i/o digitale (TBPWR)
-
Blocco i/o digitale configurabile (TBCI1- 4, TBCO1– 4): Per il collegamento delle periferiche necessarie per il funzionamento del robot
-
Morsettiera i/o analogica (TBAIO)
-
Morsettiera per ingresso encoder (TBEN1, TBEN2)
-
Morsettiera con ingresso di sicurezza (TBSI): Utilizzato per collegare direttamente i sensori di sicurezza che generano segnali OSSD ai segnali di sicurezza del controller (gli OSSD sono generalmente utilizzati con sensori di sicurezza e barriere fotoelettriche o come uscite di controllo di sicurezza).
Attenzione
-
Per evitare il rischio di danni e malfunzionamenti del prodotto, assicurarsi di spegnere l'alimentazione quando si collegano i terminali all'i/o del controller
-
Se il prodotto è danneggiato o danneggiato a causa della negligenza dell'utente, Doosan Robotics non compensa.
-
Quando si spegne il controller, assicurarsi di spegnere anche la fonte di alimentazione esterna.