|
No |
Tema |
Descripción |
|---|---|---|
|
1 |
Botón de guía manual |
Este botón se puede utilizar para ajustar o cambiar la pose del robot. |
|
2, 3 |
Botón de configuración del usuario |
Este botón puede modificar la pose del robot introduciendo una pose de acuerdo con una condición de bloqueo correspondiente a un modo.
|
|
4 |
Guardar botón Pose |
Guarda la pose actual del robot. |
|
5 |
Una línea hacia arriba |
Mueve el foco mostrado en la pantalla una línea hacia arriba |
|
6 |
Una línea hacia abajo |
Mueve el foco mostrado en la pantalla una línea hacia abajo |
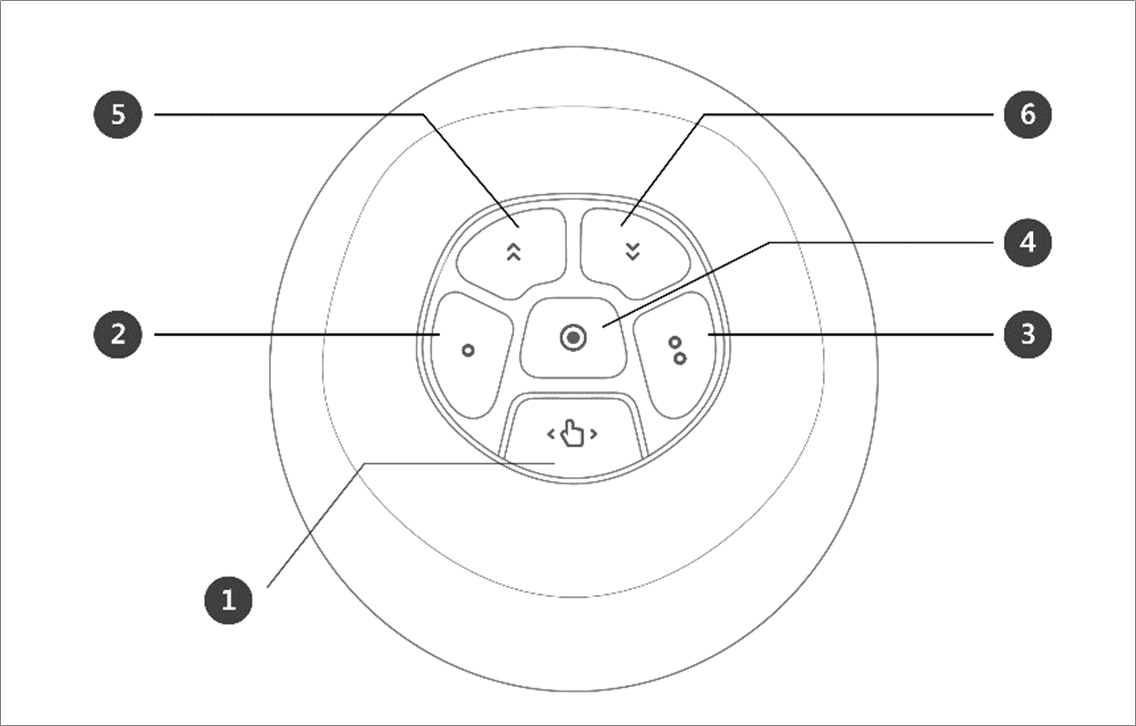
Enseñanza directa (guía manual)
La guía manual se utiliza para sostener el extremo del robot con las manos para empujar y tirar del robot a la pose deseada, y aplicar la postura al movimiento seleccionado actualmente.
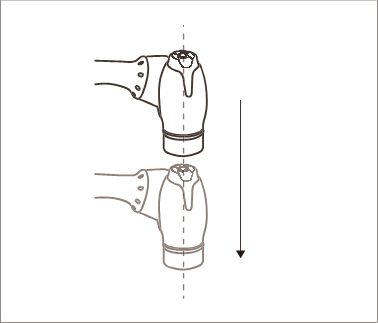
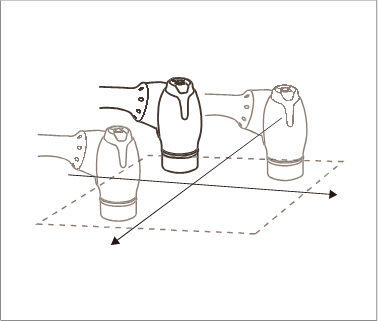
Hay dos métodos de enseñanza directa.
-
FreeDrive: Cada articulación se mueve en la dirección que el usuario aplicó la fuerza
-
Movimiento restringido: El extremo del robot se mueve o gira solo en la dirección establecida en el movimiento restringido incluso cuando se aplica fuerza desde una dirección aleatoria
FreeDrive
Cuando se presiona el botón 1, se activa el modo FreeDrive, permitiendo que el robot se mueva libremente. Cada articulación se mueve en la dirección que el usuario aplicó la fuerza. El robot no se puede mover a mano una vez que se suelta el botón.
-
Durante la enseñanza directa, el robot led parpadea cian.
-
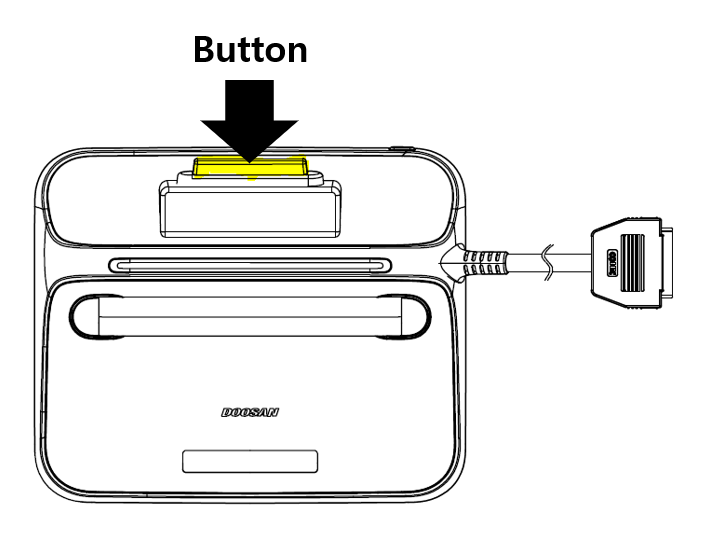
Al presionar el botón de guía manual en la parte posterior del colgante Teach se activará el modo FreeDrive, al igual que presionando el botón 1, y el robot se puede mover libremente.
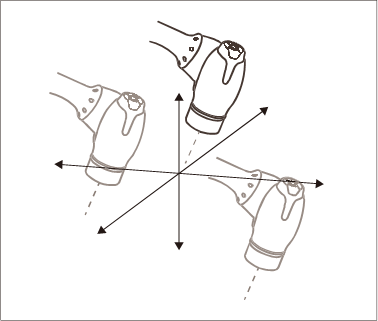
Movimiento restringido
Cuando se presiona el botón 2 y el botón 3, el extremo del robot se mueve solo en la dirección que coincide con la condición de restricción, incluso cuando se aplica fuerza desde una dirección aleatoria. La condición de restricción se puede establecer con 2 de 4 de las condiciones en la siguiente figura: Eje Z restringido, arreglo plano restringido, superficie restringida y dirección restringida.
Configuración de los botones de la cabina
Unknown Attachment
Menú
|
Temas |
Descripción |
|
|---|---|---|
|
1 |
Imagen de cabina |
Esta es una imagen para la configuración de Cockpit. |
|
2 |
Restablecer |
Este botón le permite inicializar los valores establecidos. |
|
3 |
1 ajuste de botón |
Esta es la sección donde se puede seleccionar la función que se va a configurar para el botón 1. |
|
4 |
Ajuste de 2 botones |
Esta es la sección donde se puede seleccionar la función que se va a configurar para el botón 2. |
|
5 |
1+2 Botones de ajuste |
Esta es la sección donde puede seleccionar si desea habilitar la sujeción de los botones 1+2. |
|
6 |
Guía de imagen |
Una imagen de guía para los elementos de configuración de Cockpit. |
Obtención del estado del botón de cabina
El usuario puede obtener información sobre si el botón Cockpit está presionado o liberado.
El robot proporciona la función de controlar el botón Cockpit, lo que permite su uso en diversas aplicaciones.
-
El "Monitoreo de datos" en la API de comunicación proporciona información en el botón Cockpit.
-
Si presiona el botón Cockpit del robot o viceversa, puede detectarlo a través de la API DRL.
-
API DRL: Get_cockpit_input (Por favor, consulte el Manual de Programación.)
-
Parámetros: índice (int)
-
Devoluciones: (int) 1: Pulsado (se presiona el botón), 0: Liberado (el botón no está presionado)
-