世界坐标
机器人的世界坐标可以从世界坐标设置。如果机器人坐标是基准坐标,则可以跳过此步骤。
世界坐标可以在 机械手参数>机械手设置>世界坐标中设置。
-
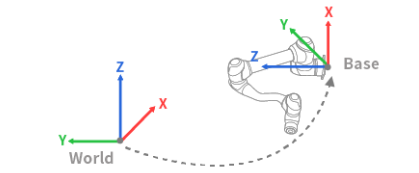
当机械手底座安装位置物理移动/旋转时,使用世界坐标。
-
更改世界坐标将对机械手模拟器屏幕应用相同的移动/旋转。
注意
即使在机器人教学后更改了基准位置和角度,也可以使用世界坐标。如果过去通过机器人教学创建的任务坐标从基座更改为世界坐标,则与世界坐标移动/旋转对应的偏移将应用到所有运动坐标。
Unknown Attachment
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
锁定切换按钮 |
用于锁定设定值。修改设定值需要安全密码。 |
|
2 |
信息图像 |
这是设置所需的信息性图像。 |
|
3 |
信息消息 |
这是设置所需的信息性消息。 |
|
4 |
安装姿势 |
此部分包括A,B和C的安装姿势值 |
|
5 |
点,直线和基准面设置 |
您可以在此处选择和设置点,线和基准面之间的所需项目。 |
|
6 |
教学指南 |
这是设置点,线和基准面的指南。 |
|
7 |
坐标 |
您可以在此处选择基体和世界之间所需的坐标。 |
|
8 |
点1设置 |
在这里,您可以设置6个轴的设置,以及设置姿势和移动到。 |
|
9 |
"应用教学要点"按钮 |
此按钮允许您输入所需的设置并应用它们。 |
|
10 |
世界到基准坐标重置 |
此按钮允许您将World to Base坐标重置为已输入的基准坐标。 |
|
11 |
世界到基准坐标设置 |
您可以在此处输入6轴的设置。 |
|
12 |
应用按钮 |
可以应用设置值。 |
用户坐标
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
新增 |
使用此按钮可以删除选定的用户坐标。最多可添加100个用户坐标。 |
|
2 |
删除 |
使用此按钮可以删除选定的用户坐标。 |
|
3 |
选定的用户坐标 |
这是添加的用户坐标列表。 |
|
4 |
用户坐标名称 |
您可以在此处设置用户坐标的名称。可以输入一个介于101到200之间的数字,最大长度为40个字符。 |
|
5 |
点,直线和基准面设置 |
您可以在此处设置每个点,直线和基准面。 |
|
6 |
信息图标 |
提供了用户坐标指南。 |
|
7 |
坐标 |
您可以在此处选择Base或World作为所需值的基础。 |
|
8 |
点1设置 |
在这里,您可以为Point 1的6个轴中的每一个输入值,然后运行Get Position或Move To。 |
|
9 |
应用教学要点 |
使用此按钮可以在输入所需值后应用这些值。 |
|
10 |
用户坐标 |
在User Coordinates (用户坐标)部分,您可以输入每个所需的值。 |
|
11 |
保存 |
此按钮允许保存设置值。 |