注意
-
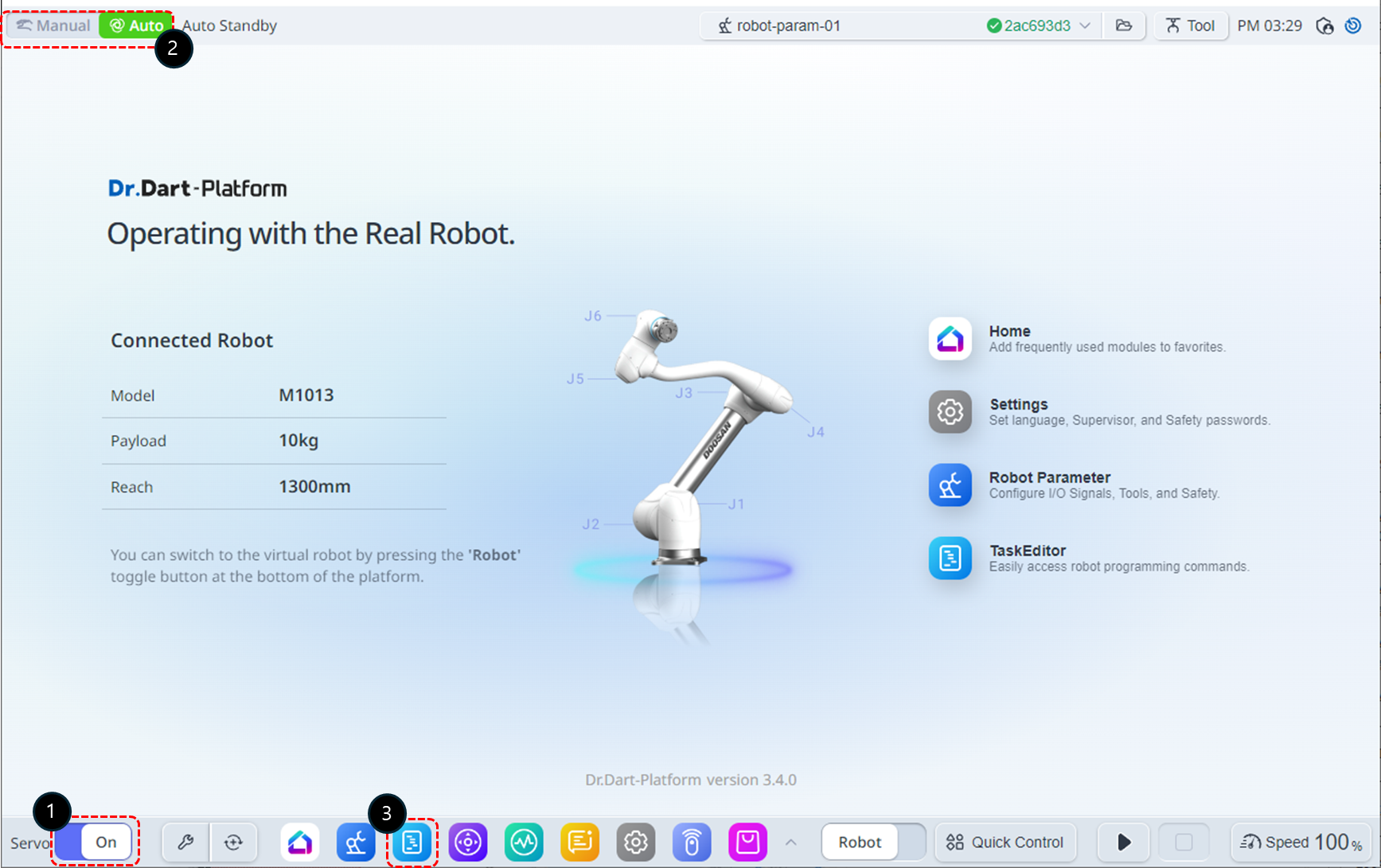
将伺服状态更改为开。
-
将操作模式切换为手动。
-
从底部菜单中选择任务编辑器模块。
-
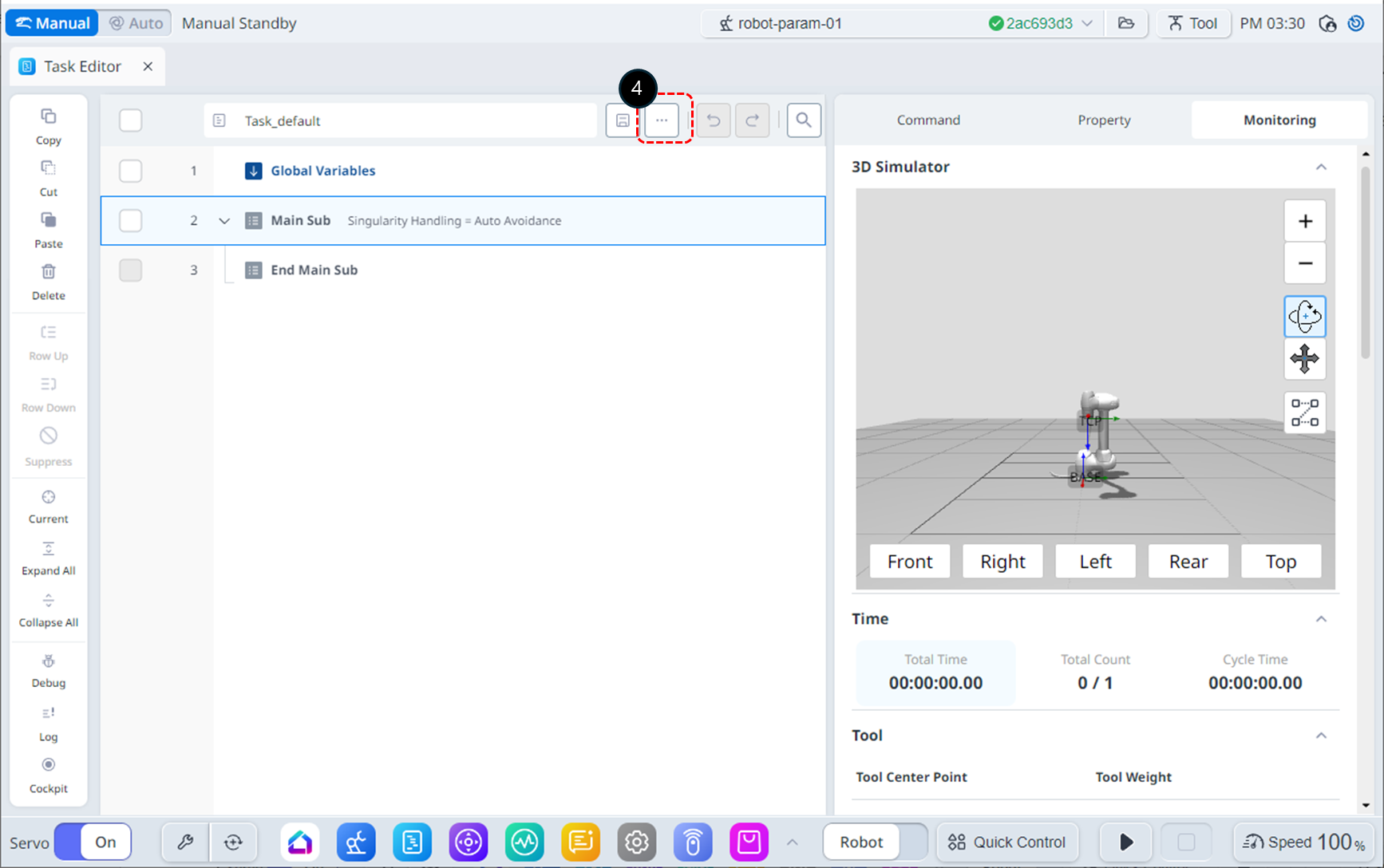
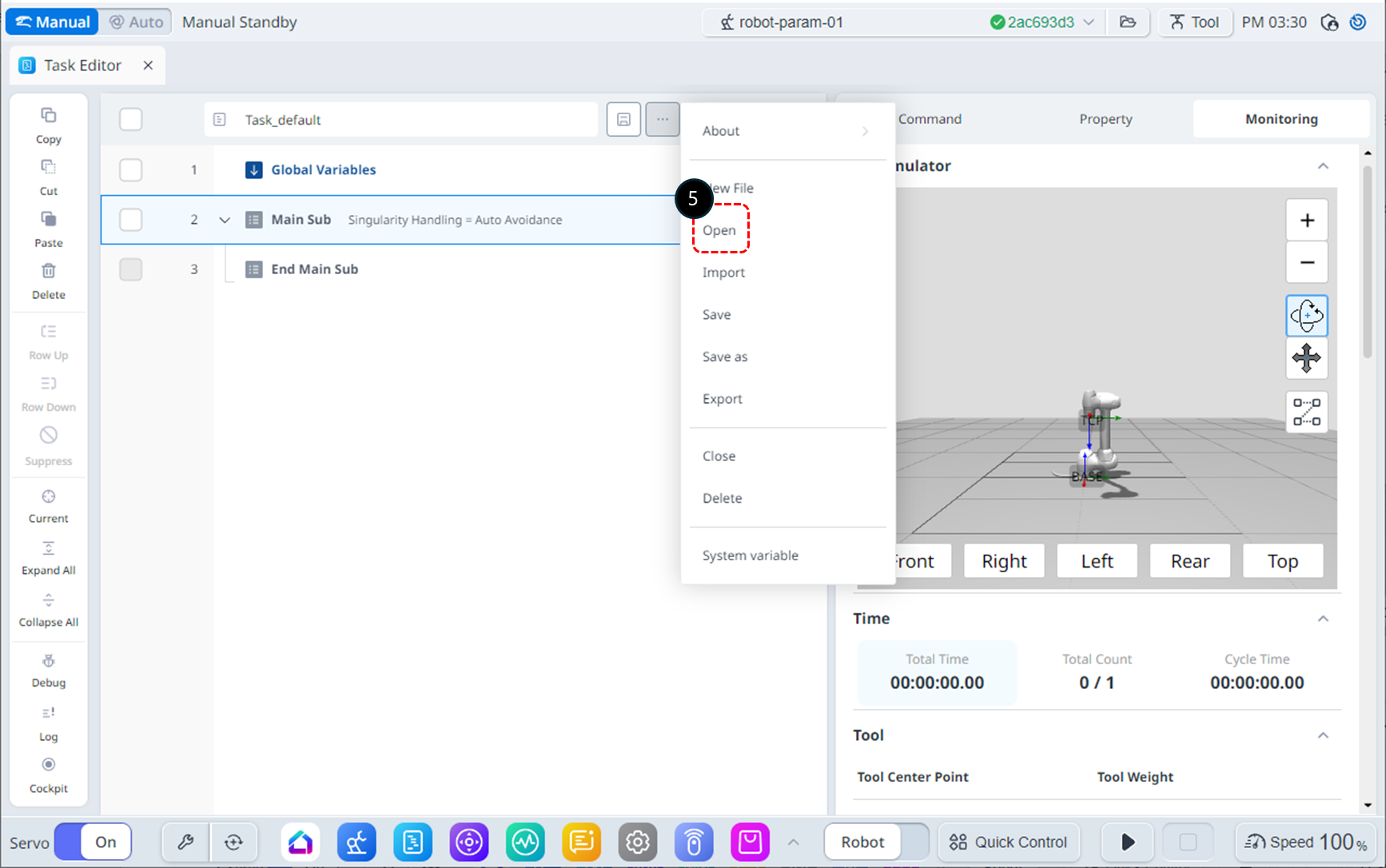
单击"File (文件)"按钮。
-
单击"Open (打开)"按钮。
-
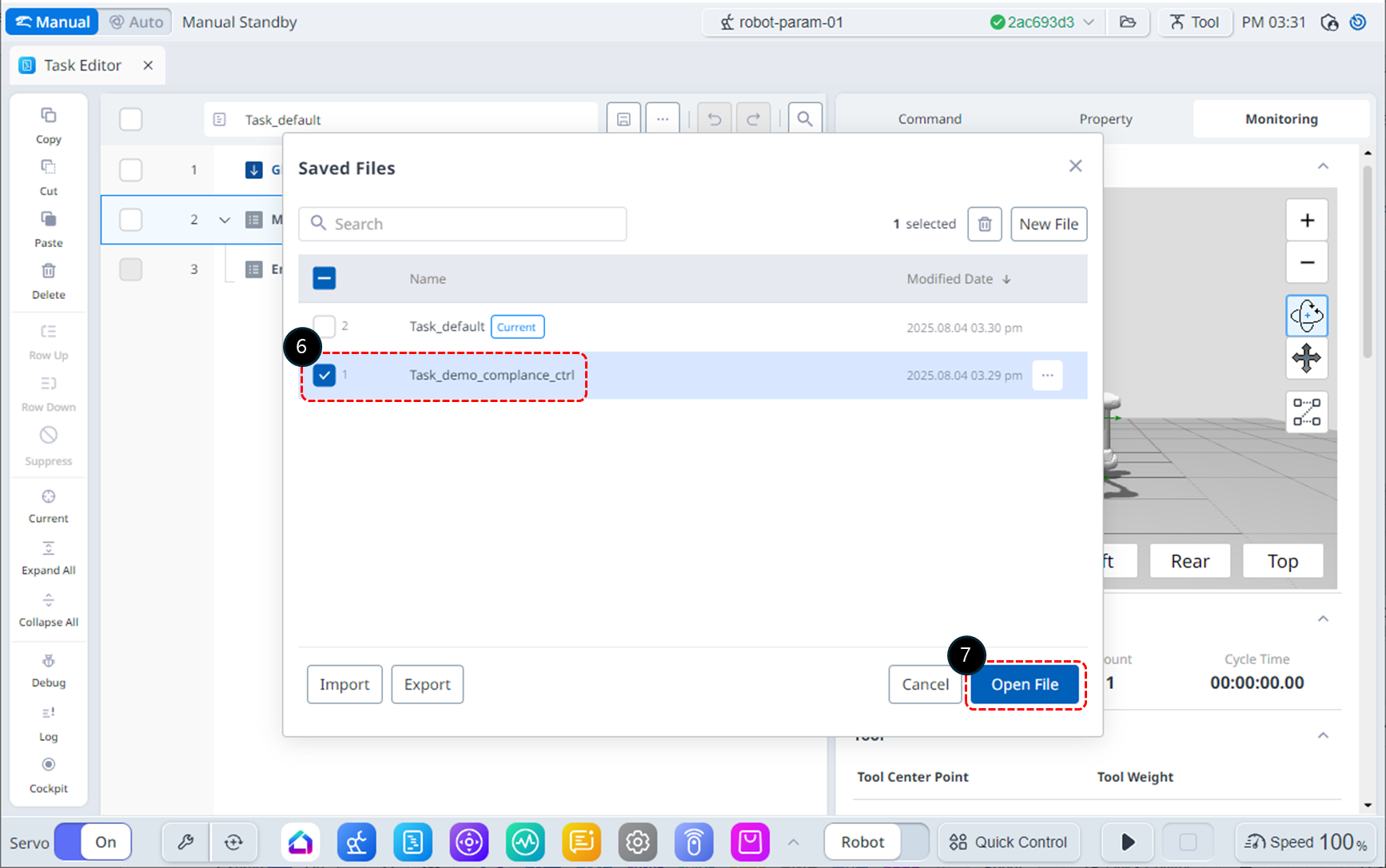
单击"Open File (打开文件)"按钮。
-
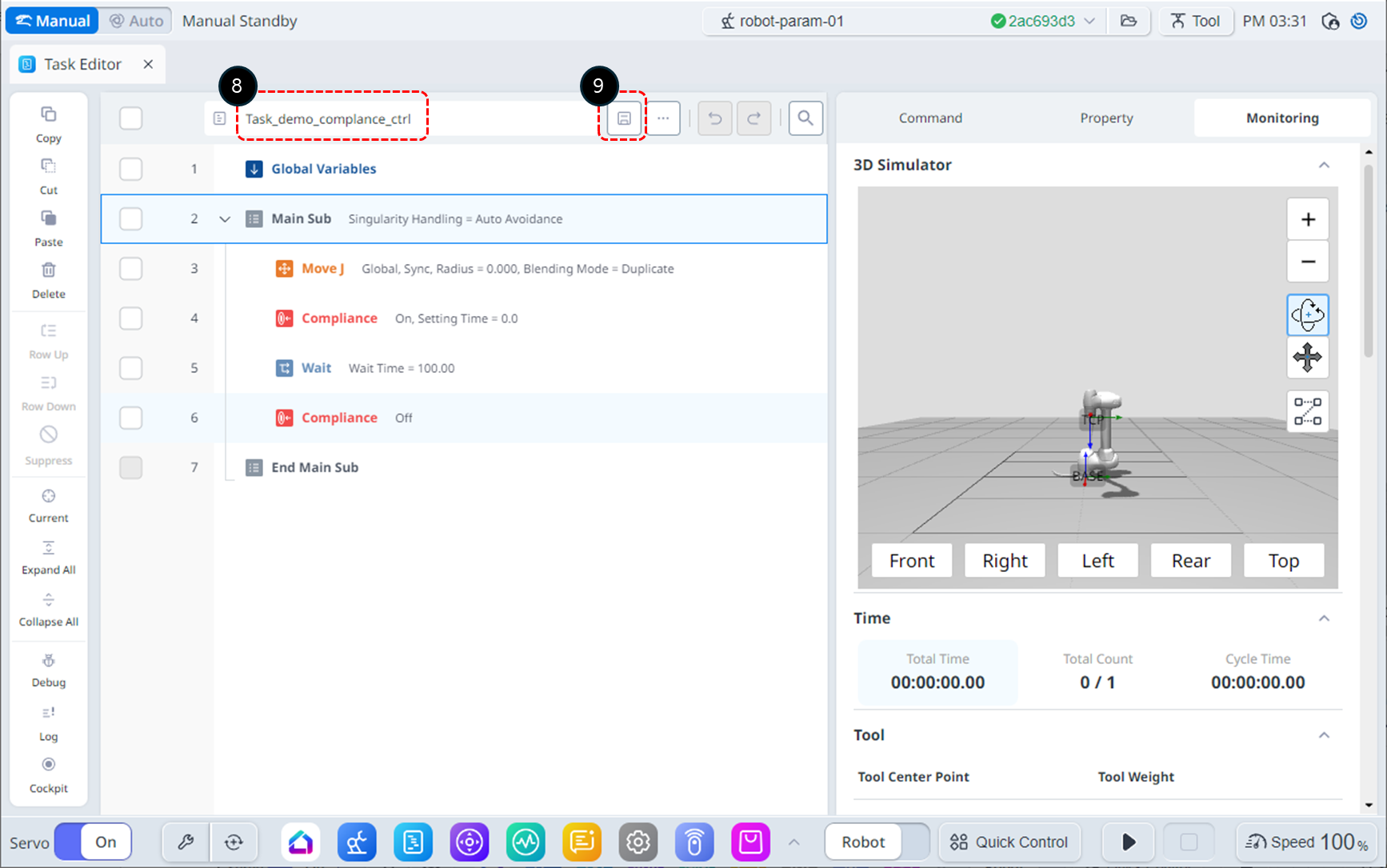
将文件重命名为Task_demo_force_ctrl。
-
单击保存按钮以保存文件名。
-
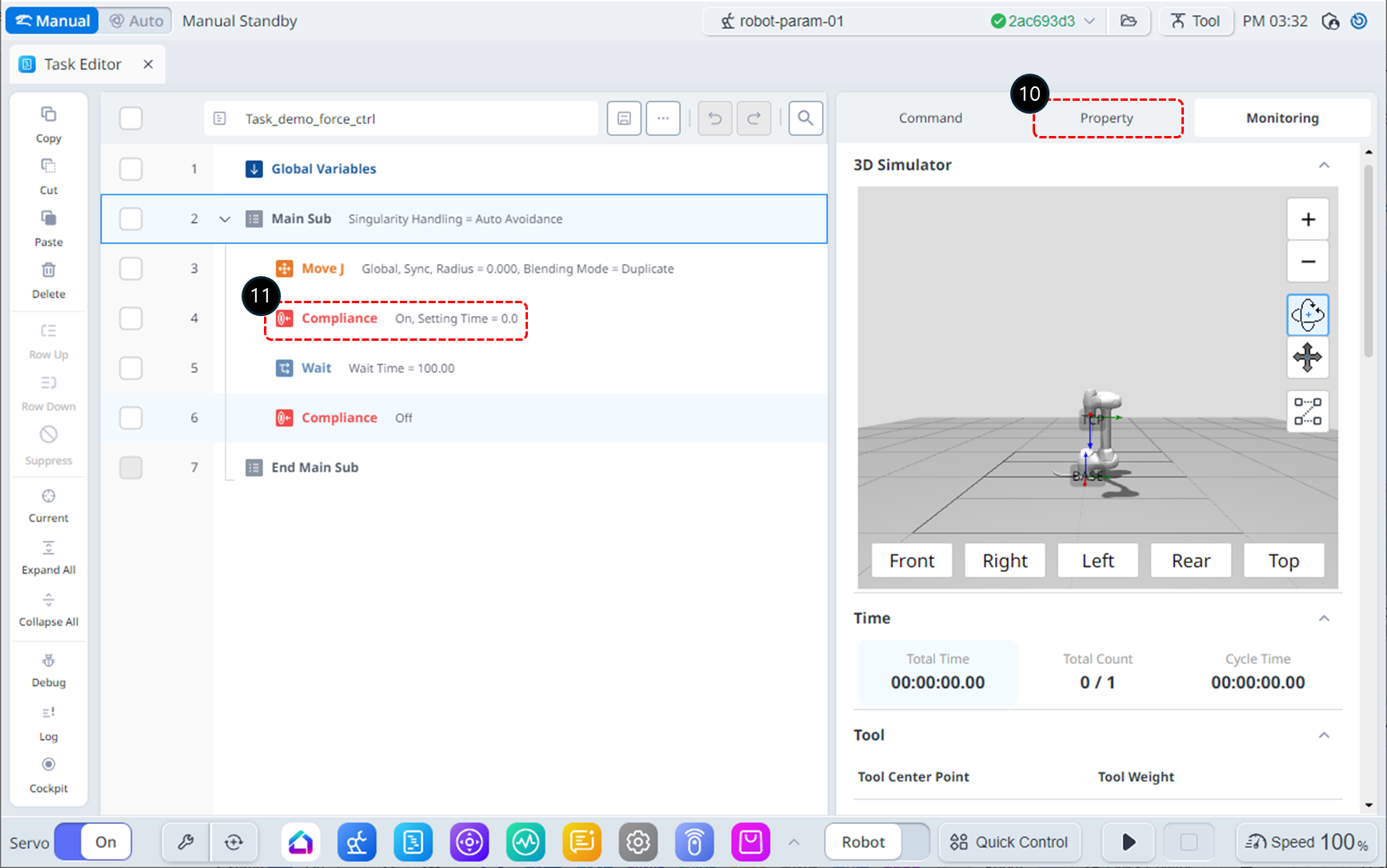
选择属性选项卡。
-
选择第4行上的"合规性"命令。
-
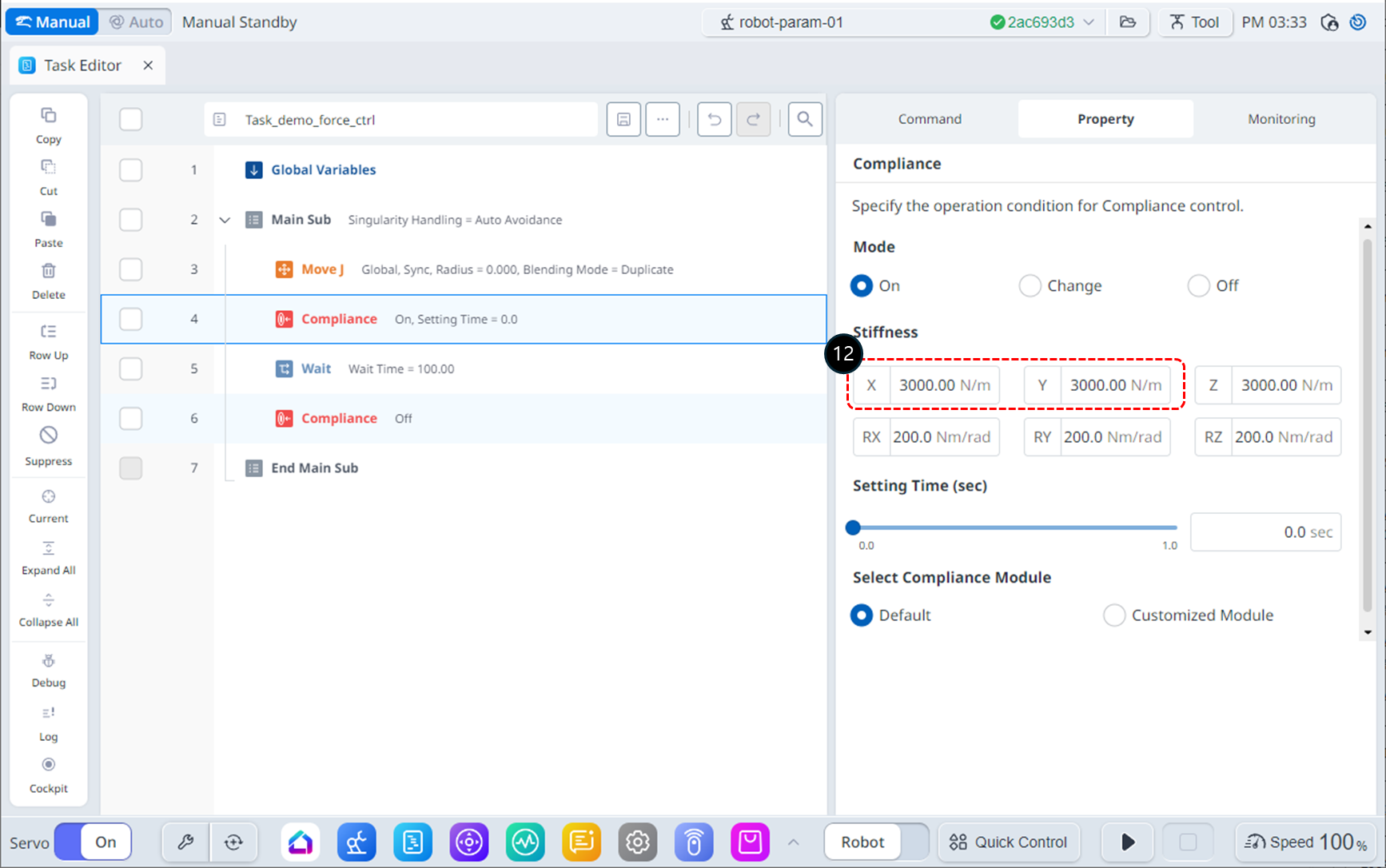
将刚度设置为默认值,如下所示。
-
X,Y,Z:3000 N/m (默认)
-
Rx, Ry, Rz:200 Nm/rad (默认)
-
-
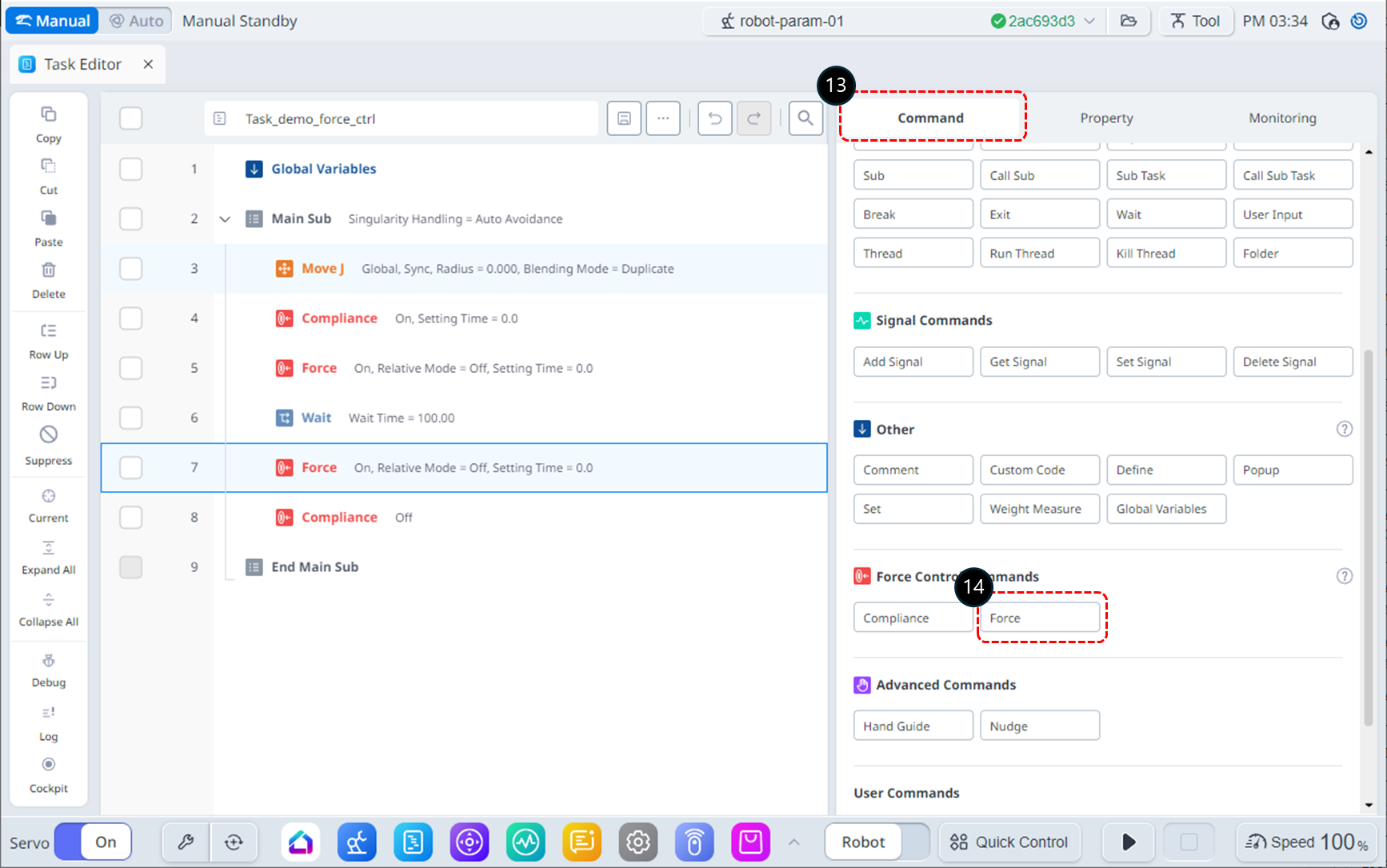
选择命令选项卡。
-
在第5行和第7行添加强制命令。这些命令将用于激活和停用力控制。
-
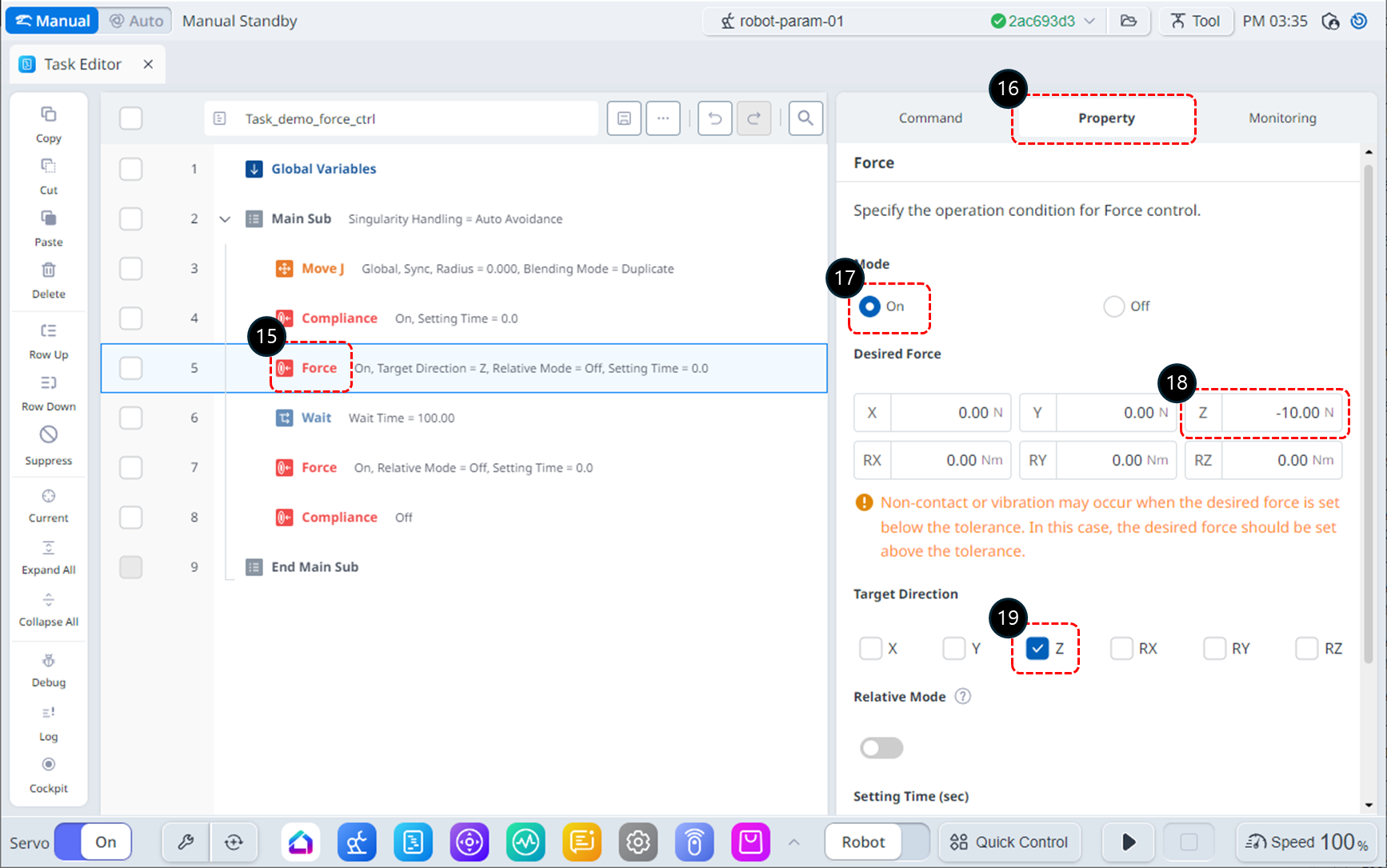
选择第5行上的强制命令。
-
转到属性选项卡。
-
按如下所示设置模式:打开模式激活力控制。
-
模式:开
-
-
按如下所示设置所需的力。
-
X:0 N (默认)
-
Y:0 N (默认)
-
Z:-10牛顿
-
Rx, Ry, Rz:0 Nm/rad (默认)
-
-
在目标方向上,仅检查z轴。
-
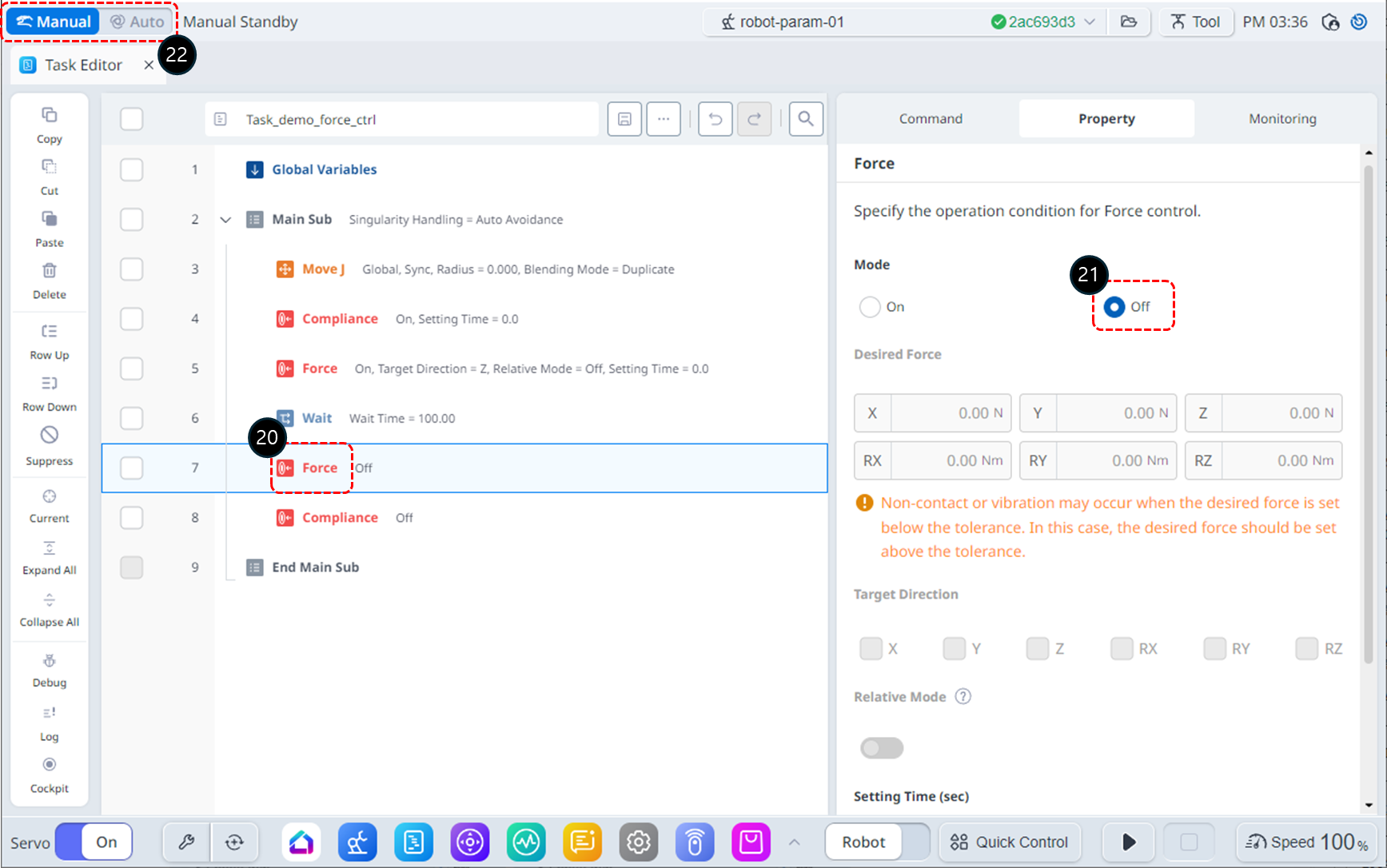
在任务列表中,选择第7行的强制命令。
-
按如下所示设置模式:模式关闭停用力控制。
-
模式:关闭
-
-
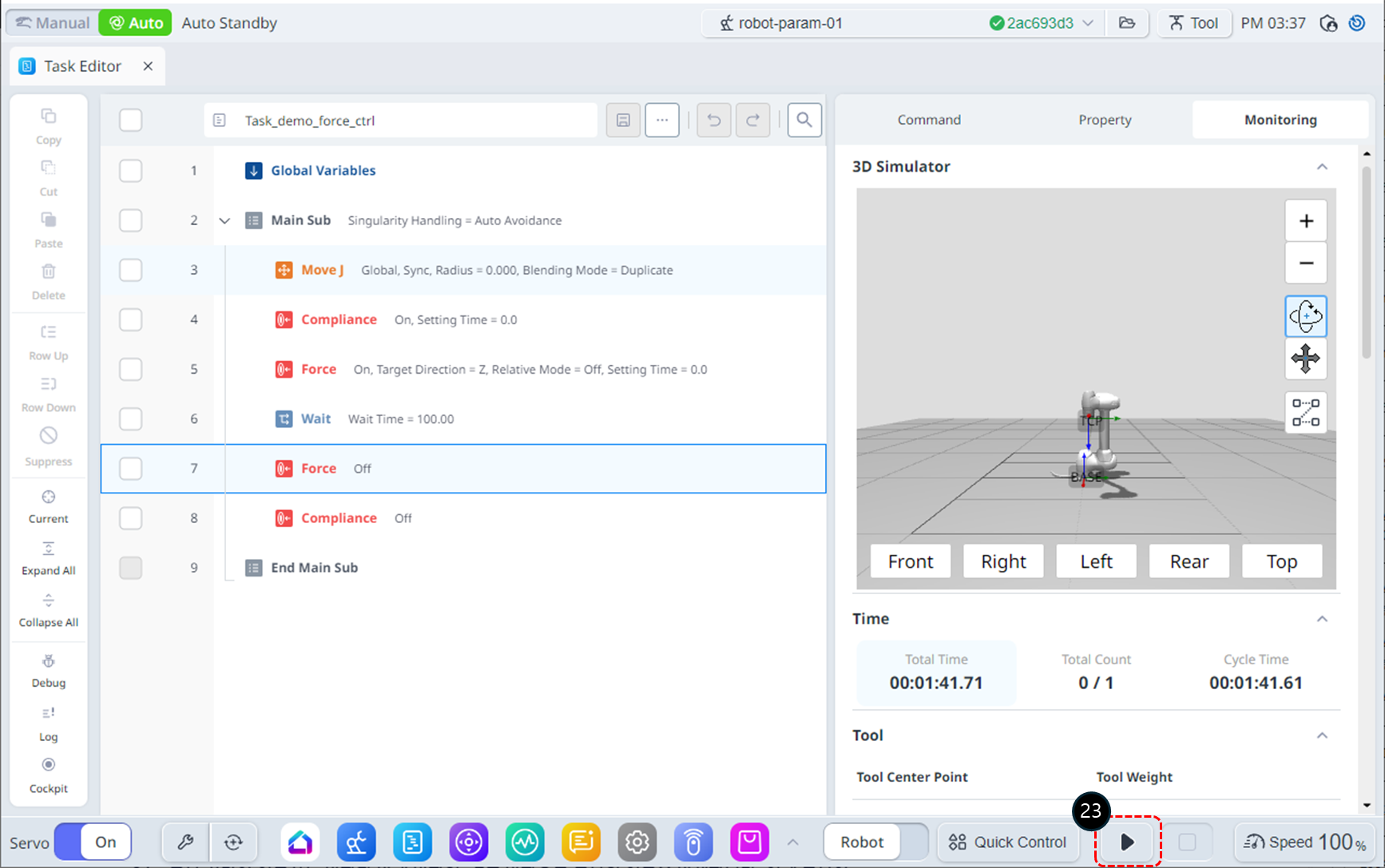
将操作模式切换为自动。"属性"选项卡将自动切换到"监视"选项卡。
Unknown Attachment
-
单击"Run (运行)"按钮。在等待状态下,机械手的操作方式如下:
-
在机械手的末端执行器上施加-10N的力,导致机械手沿-Z方向缓慢移动。
-
在+Z方向施加反作用力,使机器人运动相反。当机器人施加的力和相反力保持平衡时,机器人将看起来像静止不动一样保持其位置。
-
如果对机械手施加了大于+10N的力,机械手将沿所施加力的方向移动。
-

-
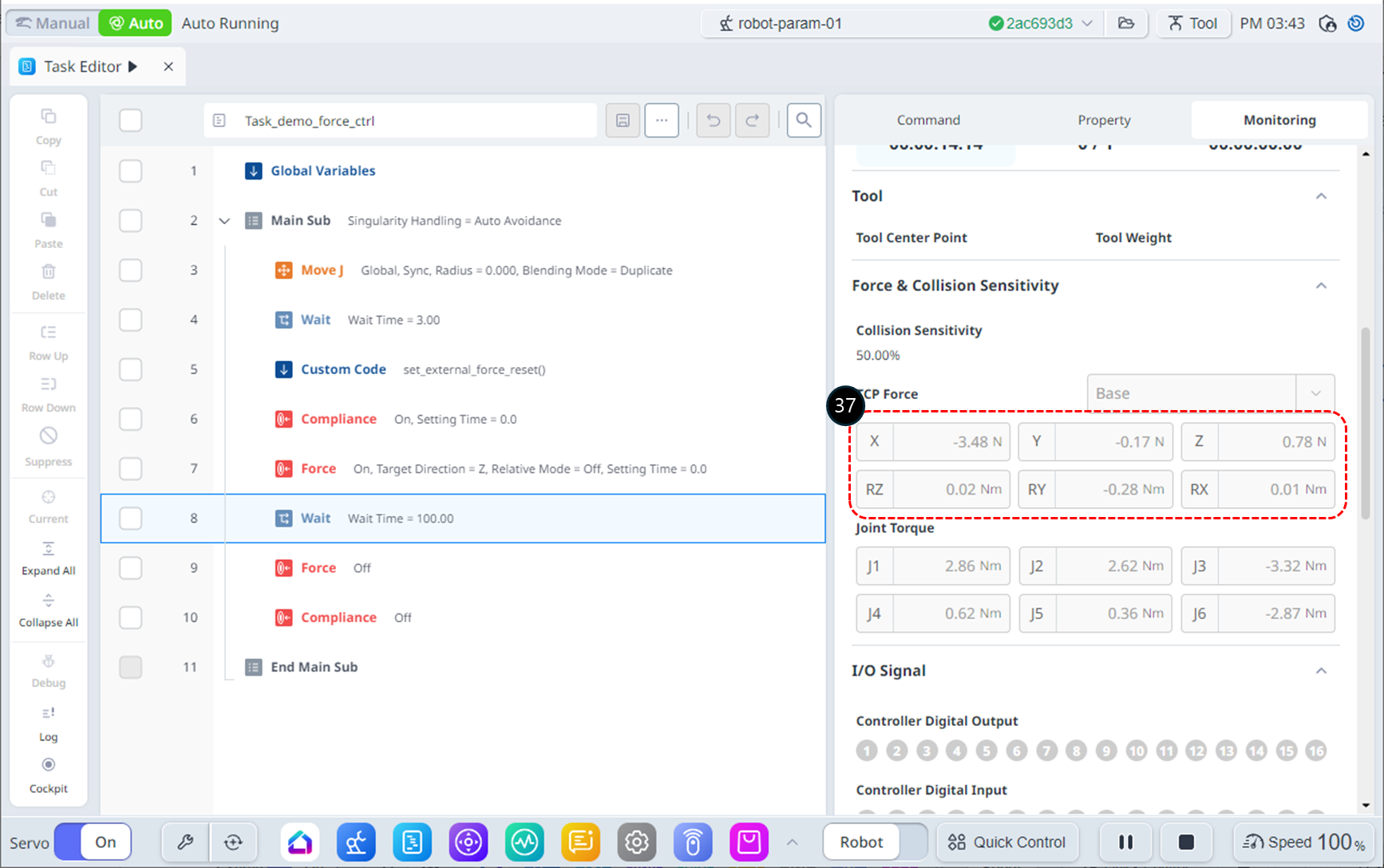
在操作过程中,您可以在"监视"选项卡的"TCP强制"部分监视实时TCP强制。如果没有对机器人的终端执行器施加力,TCP力值应为0,但您可能会注意到显示的是错误组件。以下是解决此问题的附加说明。
-
单击停止按钮终止任务。
-
将操作模式切换为手动以修改任务。
-
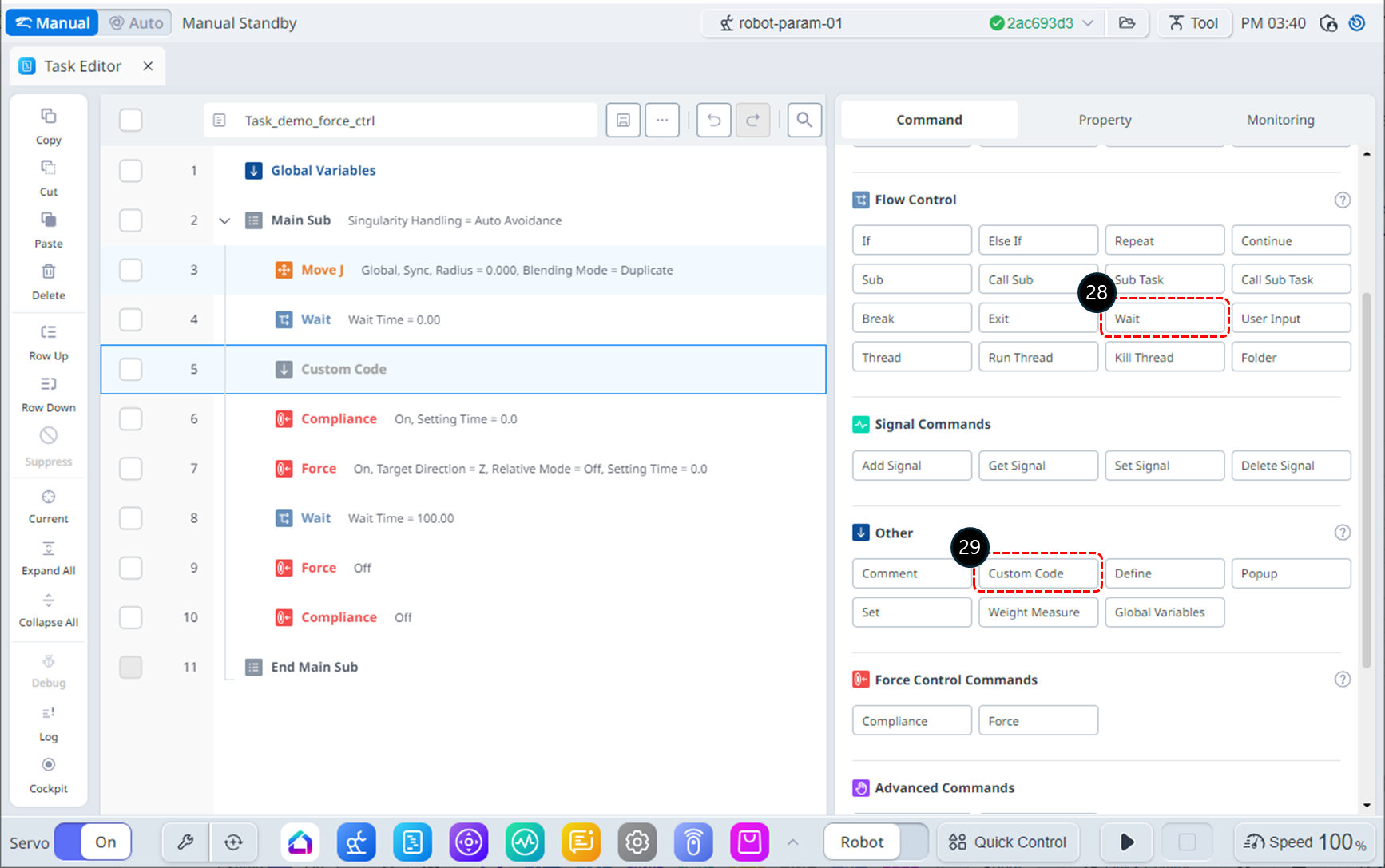
选择命令选项卡。
-
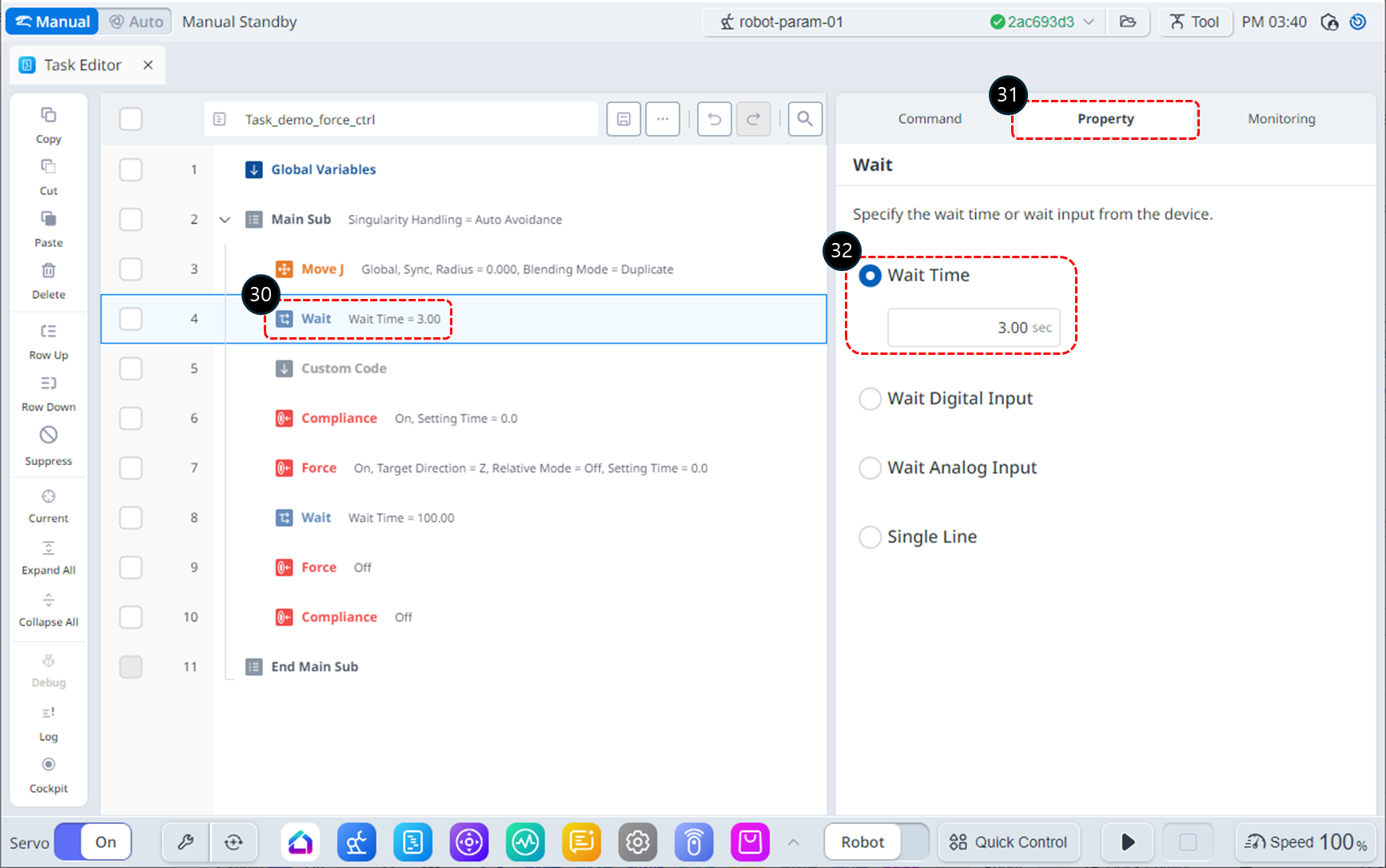
将等待命令添加到任务列表的第4行。
-
将"自定义代码"命令添加到"任务列表"的第5行。
-
选择第4行的Wait命令。
-
选择属性选项卡。
-
按如下所示设置等待时间。
-
等待时间:3秒
-
-
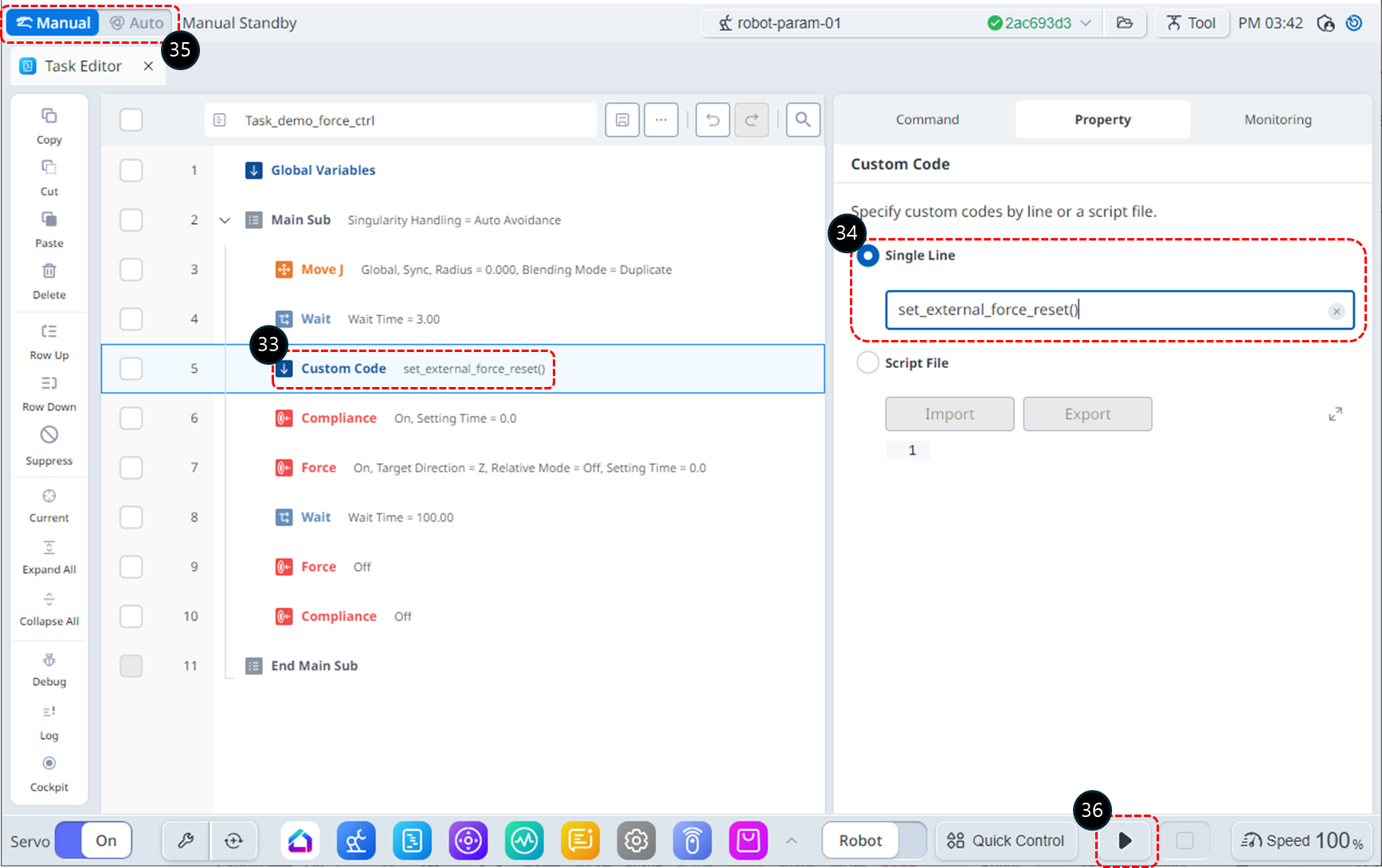
选择第5行上的"自定义代码"命令。
-
选择单行并添加以下DRL命令:此命令重置外部力传感器值以消除任何错误。
-
set_externl_force_reset()
-
-
将操作模式切换为自动。"属性"选项卡将自动切换到"监视"选项卡。
-
单击"Run (运行)"按钮。
-
在监视选项卡中,检查TCP强制值。您会注意到,与使用set_external_force_reset()命令之前相比,错误已经减少了。