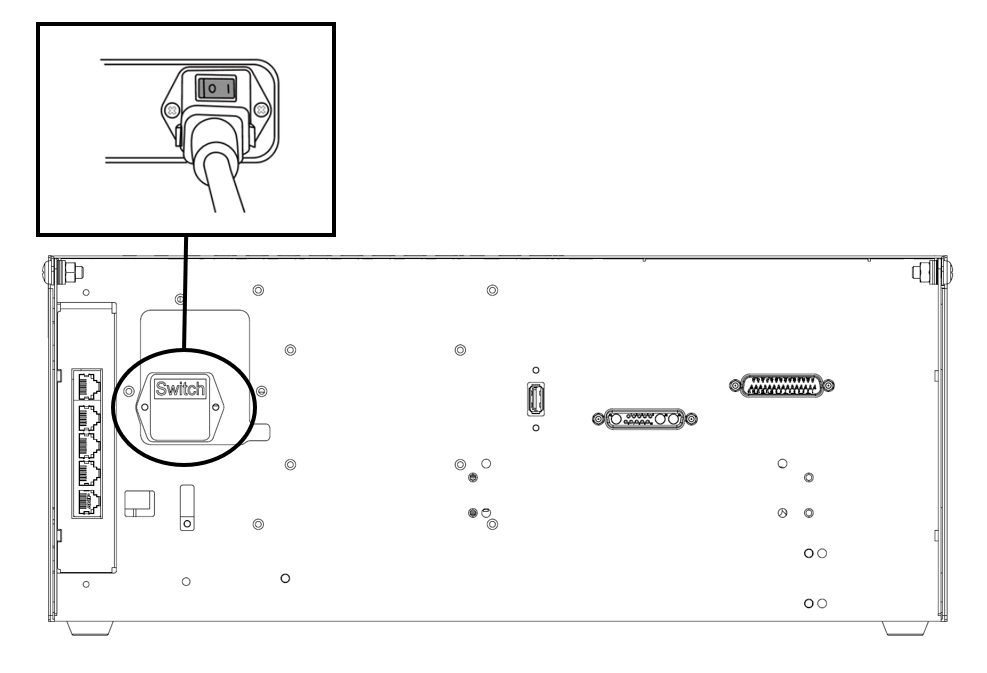
打开控制器电源
必填 简单 1分钟
-
按下控制器底部的电源开关。打开机械手,控制器和教学手控盒等系统的电源。
-
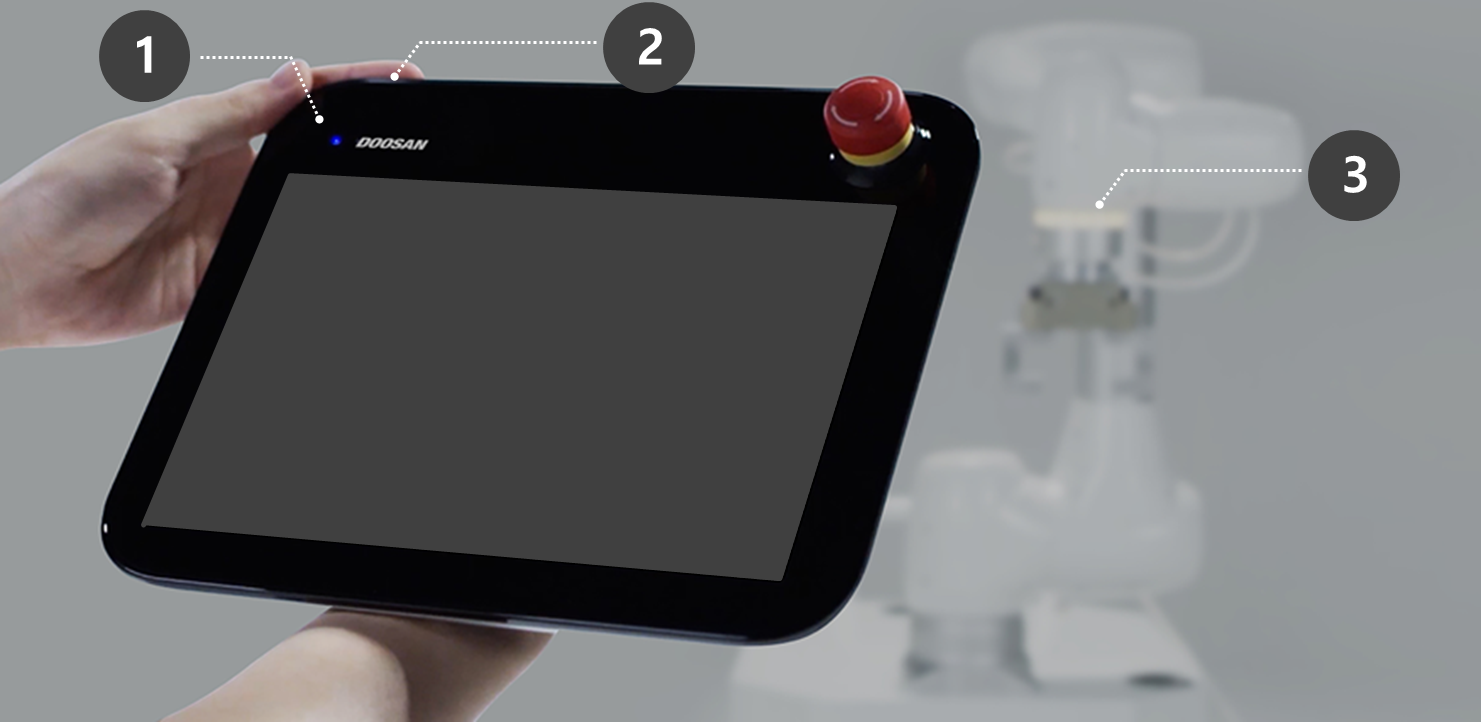
按住电源按钮(图2),直到示教手控盒屏幕通电,示教手控盒LED (图1)和法兰LED (图3)将呈红色闪烁,直到机械手控制器连接到网络。
ㅤ
ㅤ
-
有关非示教手控盒设备的更多信息,请参阅 系统电源开/关。
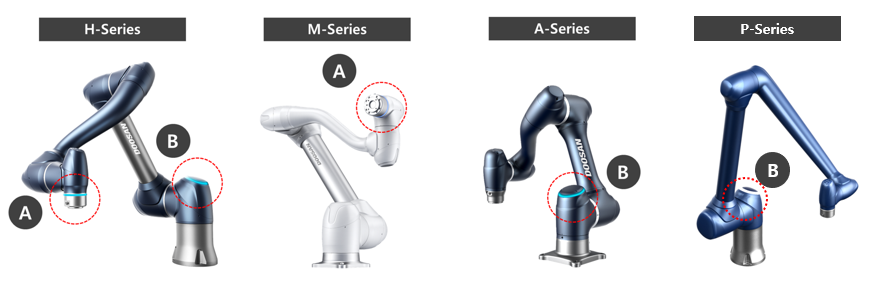
注意
斗山机器人系列的LED位置如下:
-
答:法兰LED
-
B:轴1 LED
分离紧急停机按钮
必填 简单 1分钟
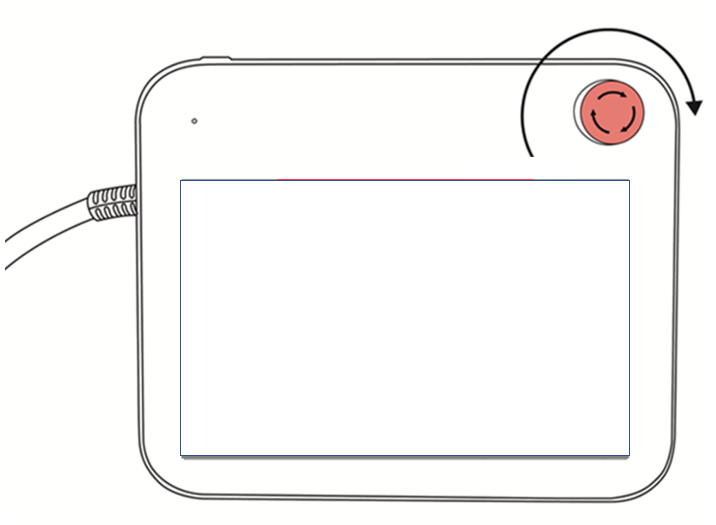
机械手安装后和系统初始启动后,当按下示教手控盒的紧急停止按钮时,会显示一个警告弹出窗口。必须断开紧急停机按钮才能操作机械手。
-
顺时针旋转紧急停机按钮以解除紧急停机状态。
松开包装姿势
必填 简单 3分钟
机器人处于包装姿势,便于运输或包装。要使用机械手,必须脱离包装姿势。由于机器人在包装姿势时保持的姿势超过了接合角度限制,因此由于违反安全限制,无法将伺服设置为打开状态。机械手LED在此状态下呈红色亮起。
注意
如果在重新定位时需要包装机器人,请在包装模式下使用带包装姿势的移动来设置包装姿势。
Unknown Attachment
|
项目 |
说明 |
|
|---|---|---|
|
1 |
型号名称 |
此时将显示连接的机械手型号的名称。 |
|
2 |
打包/解包 |
可以选择打包或解包。 |
|
3 |
包装姿势/接合限制 |
出现姿势和关节极限值。 |
|
4 |
速度比 |
打包或解包模式的速度可通过滑块或输入进行调整。 |
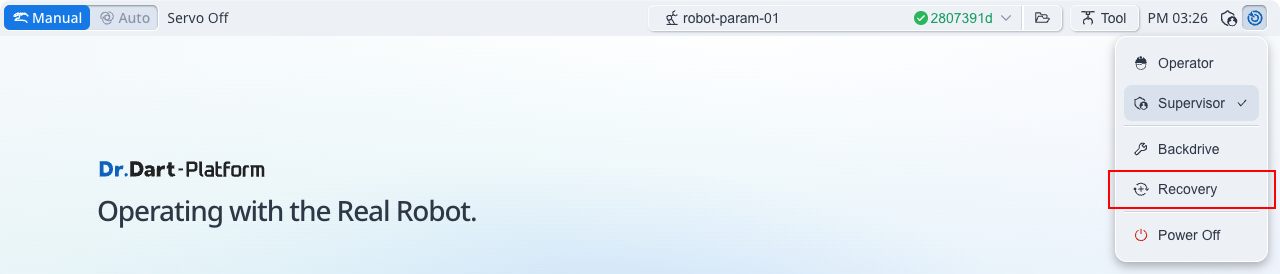
配置包装姿势的过程如下:
-
点击 标题窗格中的Recovery(恢复)菜单。
-
选择 打包模式 选项卡。

-
点击 Servo On to Start Recovery (伺服开启以开始恢复)按钮以启用打包模式。

-
机械手自动移动到设定的包装姿势。
-
使用 "打包 "按钮可以将机械手置于"打包"位置,使用 "解包"按钮可以将机械手置于"默认起始位置"。
-
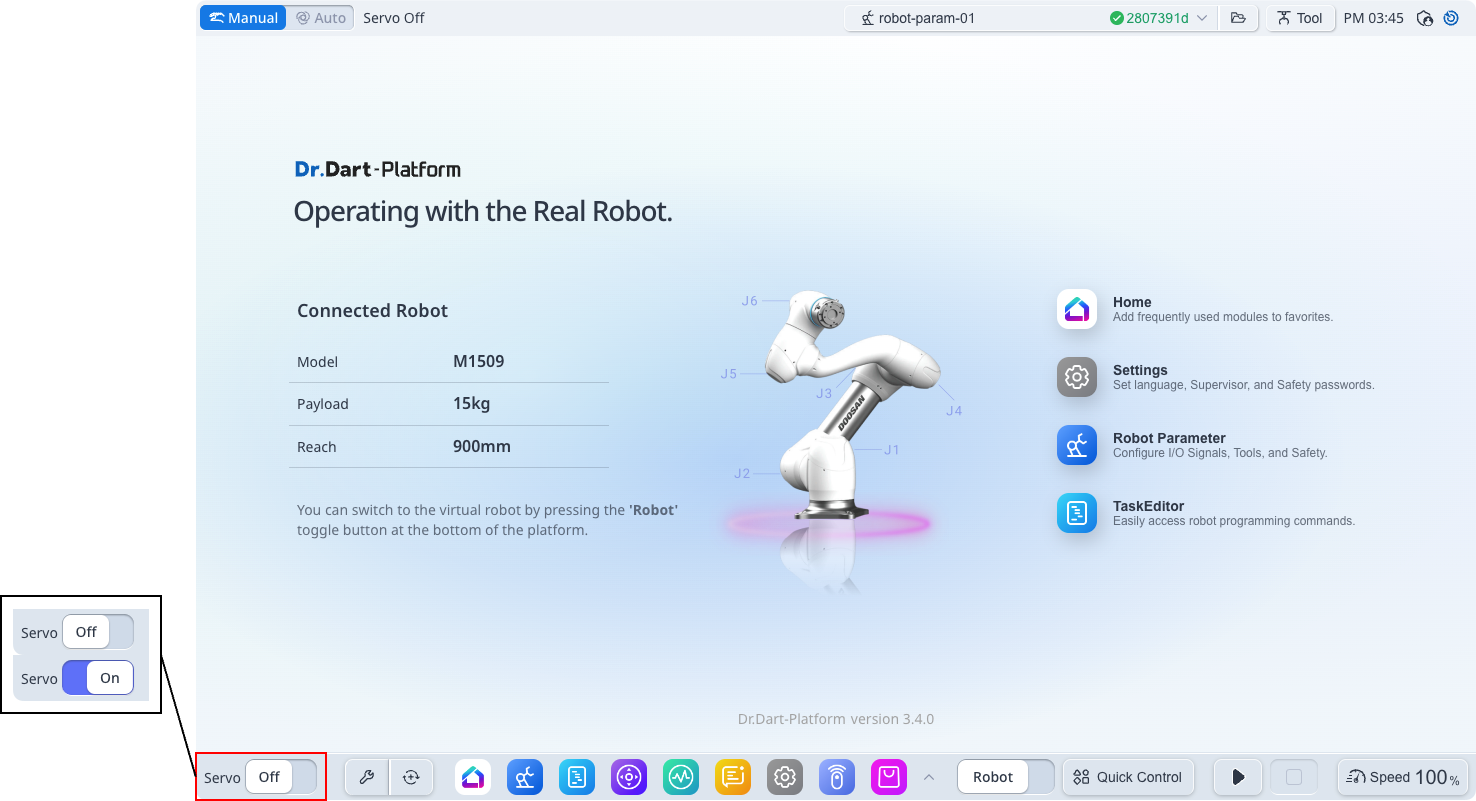
伺服关闭
必填 简单 1分钟
伺服开启状态是指机械手准备好为机械手接头供电以修改机械手姿势的状态。
按下伺服关闭按钮切断机械手接头的电源并停止机械手。有关更多信息,请参阅 上的伺服概述。