Unknown Attachment
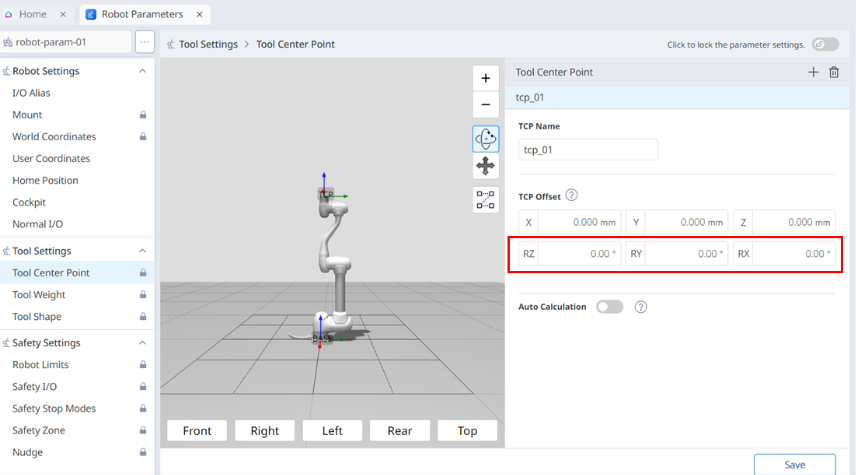
工具中心点
配置刀具中心点(TCP)时,还必须根据法兰坐标定义位置和旋转角度。 IME,从法兰坐标的默认起点到X,Y和Z方向上的工具中心点(TCP)的距离不能设置为大于10000 mm。此外,请注意,力控制,顺应控制和直接教学点固定仅在X,Y和Z ( ![]()
如果使用 自动计算配置刀具中心点(TCP),则只根据X,Y和Z轴位置进行计算,因此需要输入旋转角度。可以使用RZ,RY和RX定义旋转角度,并根据"Euler Z-Y-Z"旋转方法定义旋转角度。
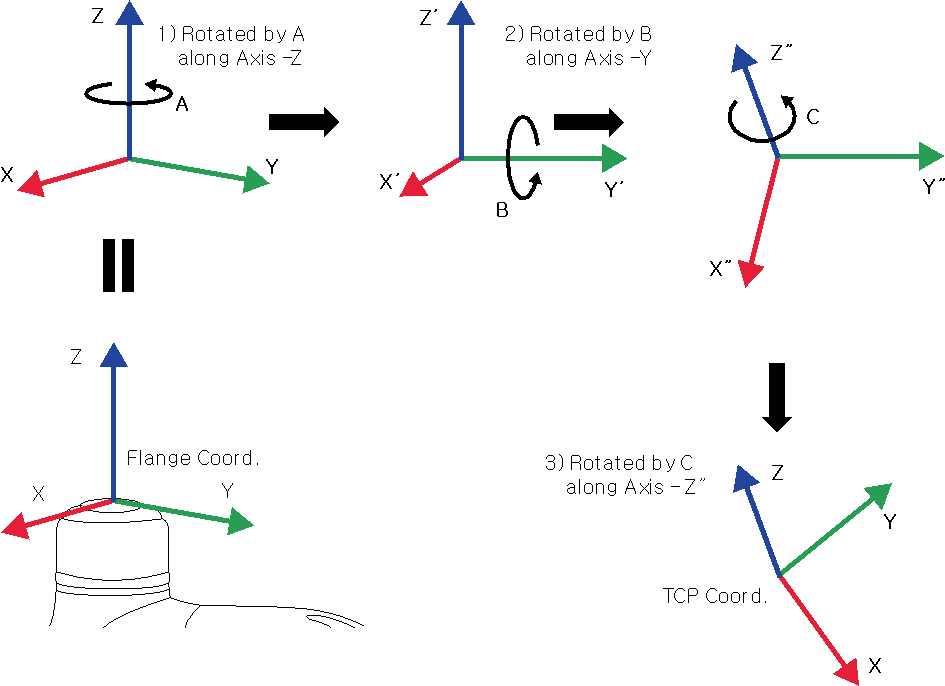
以x,y,z表示的坐标轴和以X,Y,Z表示的坐标轴的定义如下:
-
"法兰坐标"的坐标轴(x,y,z):当机械手的机械手接头角度为(0,0,0,0,0,0,0)时,在法兰末端定义的"法兰坐标"的坐标轴方向与机械手坐标相同。
-
"TCP坐标"的坐标轴(X,Y,Z):这是在法兰末端安装的工具的末端或工作点上设置的。此时,"TCP坐标"的旋转角度是根据"法兰坐标"定义的,顺序为:
-
沿法兰坐标的z轴旋转一度。
-
沿根据1旋转的坐标的y'轴旋转B度。
-
沿根据2旋转的坐标的z''轴旋转C度)。
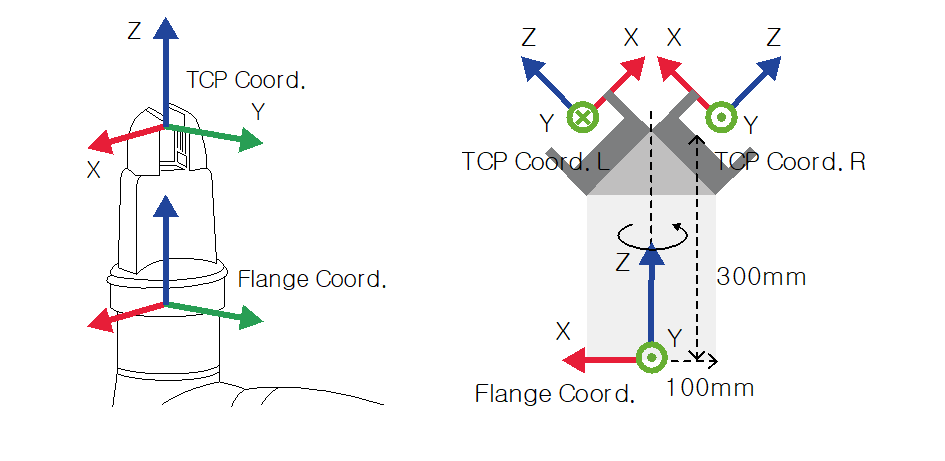
下面是根据上述方法配置TCP的几个示例:
-
[X,Y,Z,A,B, C]=[0,0,100,0,0, 0]:仅具有Z方向偏移的通用夹具(TCP坐标)
-
[X,Y,Z,A,B, C]=[100,0,300,180,-45, 0]:带45度角的左夹具(TCP坐标l)
-
[X,Y,Z,A,B, C]=[-100,0,300,0,-45, 0]:带45度角的右夹具(TCP坐标r)
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
锁定切换按钮 |
用于锁定设定值。修改设定值需要安全密码。 |
|
2 |
3D仿真 |
您可以在此处模拟已配置的工具中心点。 |
|
3 |
添加 |
使用此按钮可以添加TCP。 |
|
4 |
正在删除 |
使用此按钮可以删除选定的TCP。 |
|
5 |
保存 |
此按钮允许保存设置值。 |
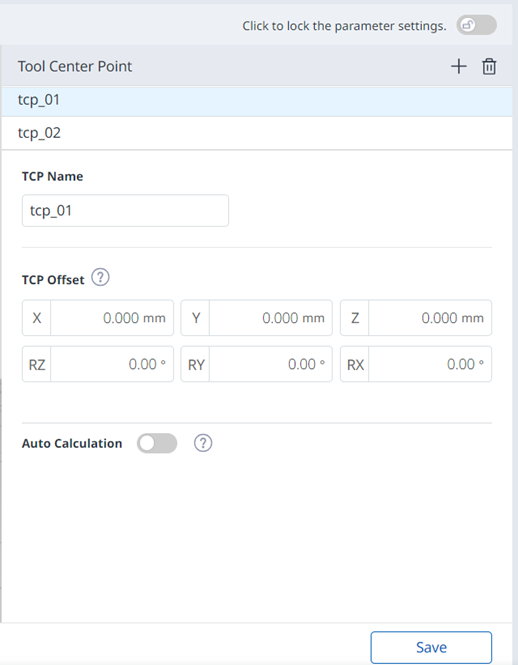
锁定设置后,将看到下面的屏幕。
Unknown Attachment
此时,所选TCP以蓝色显示,如下所示。
刀具重量
您可以通过添加工具重量来设定安装在法兰上的工具重量。可通过选择 机械手参数>工具设置>工具重量来设置工具重量。
-
可使用自动测量功能测量刀具重量。
-
建议为每个带有工件的刀具增加刀具重量。如果工件重量过大,机械手可能会将工件重量识别为外力。这是因为机器人将这种外力确定为碰撞并停止。
-
创建任务时,根据更改刀具重量的流程更改重量。例如,可以将任务配置为在拾取工件前选择标准刀具重量,并在拾取工件后随工件选择刀具重量。
按下 ![]()
-
工具设置集与其他命令集相同。 在执行任务时更改工具重量时,可以使用SET命令。有关详细信息,请参阅 任务编辑器模块 。
注意
-
最多可记录50种不同的刀具重量。
-
对于M系列,当最大刀具重量超过最大刀具重量时,加速度自动调整功能。
Unknown Attachment
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
锁定切换按钮 |
用于锁定设定值。修改设定值需要安全密码。 |
|
2 |
添加 |
此按钮允许您添加新的工具重量。 |
|
3 |
正在删除 |
此按钮允许您删除工具重量。 |
|
4 |
刀具重量列表 |
配置的工具重量列表。 |
|
5 |
工具重量名称 |
您可以在此处输入工具重量的名称。 |
|
6 |
自动测量运动 |
此按钮允许您运行自动测量。 |
|
7 |
自动测量 |
此按钮允许您选择一个选项并为其运行自动测量。 |
|
8 |
运动选择 |
您可以从选项中选择所需的运动。 |
|
9 |
选择重量的使用 |
您可以选择是否使用重量。 对于E系列或不带FPT传感器的系列,此选择框被禁用。 |
|
10 |
重量输入 |
您可以在此处输入所需的重量。 |
|
11 |
选择使用重心CX |
可以选择使用重心CX。 |
|
12 |
CX输入 |
可以输入Cx。 |
|
13 |
选择使用重心CY |
可以选择使用重心CY。 |
|
14 |
CY输入 |
可以输入CY。 |
|
15 |
选择重心CZ的使用 |
可以选择使用重心CZ。 |
|
16 |
CZ输入 |
可以输入CZ。 |
|
17 |
是否使用惯性 |
此复选框允许您选择是否使用惯性。 |
|
18 |
LXX输入 |
可以输入惯性的lxx条目。 |
|
19 |
lyy输入 |
可以输入惯性的lyy条目。 |
|
20 |
lzz输入 |
可以输入惯性的lzz条目。 |
|
21 |
LXY输入 |
可以输入惯性的LXY条目。 |
|
22 |
Lyz输入 |
可以输入惯性的lyz条目。 |
|
23 |
LZx输入 |
可以输入惯性的LZx条目。 |
|
24 |
保存 |
此按钮允许您保存设置值。 |
工具形状
安装在法兰上的刀具形状可以通过添加刀具形状来设定。
可在 机械手参数模块>工具设置>工具形状中设置工具形状。有关详细信息,请参阅 工具形状。
-
机器人根据机器人端部和机器人主体的TCP (工具中心点)确定空间超限状态。如果实际机器人的刀具形状大于设定的TCP,则必须添加刀具形状以保护工件和刀具。
-
如果刀具形状设置得太大,机械手可以操控的区域将会减小,请小心谨慎。
工具形状项目仅在注册(确认)并启用切换开关后才可用。按下 ![]()
-
工具设置集与其他命令集相同。 在执行任务时更改工具形状时,可以使用SET命令。有关详细信息,请参阅 任务编辑器模块。
注意
最多可配准五十种不同的刀具形状。
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
锁定切换按钮 |
用于锁定设定值。修改设定值需要安全密码。 |
|
2 |
3D仿真 |
在这里,您可以3D模拟配置的工具形状的结果。 |
|
3 |
工具形状名称 |
配置的工具的名称。 |
|
4 |
工具形状 |
已配置工具的形状。 |
|
5 |
编辑工具形状 |
此按钮允许您编辑配置的工具形状。 |
|
6 |
删除工具形状 |
此按钮允许您删除选定的工具形状。 |
|
7 |
添加工具形状 |
可以添加工具形状。 |
|
8 |
正在应用 |
此按钮允许您在设置工具形状后应用它。 |
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
工具形状 |
这表示此窗格是一个"工具形状"弹出窗口。 |
|
2 |
输入名称 |
这是可以输入工具形状名称的字段。 |
|
3 |
警示信息 |
设置时的注意事项 |
|
4 |
添加新立方体 |
此按钮允许您添加立方体。 |
|
5 |
添加新球体 |
此按钮允许您添加球体。 |
|
6 |
添加新胶囊 |
此按钮允许您添加胶囊。 |
|
7 |
取消 |
此按钮允许您取消设置。 |
|
8 |
确认 |
此按钮允许您确认设置。 |
添加立方体/球体/胶囊后,显示如下所示。
|
Unknown Attachment |
Unknown Attachment |
|
Unknown Attachment |
|