恢复模块:如果继续违反安全规定出错,或者需要包装机械手进行运输,用户可以使用安全恢复模式配置机械手的位置和角度。

要访问Recovery (恢复)模块,请轻触底部的Recovery (恢复)按钮。
-
软件恢复:在伺服关闭状态下,如果由于位置相关的安全违规(如机械手退出操作区域或违反禁止区域)而导致安全违规情况发生,或者在机械手因与固定物体碰撞而停止 时持续施加力,则即使尝试使用点动或程序将机械手重置为正常状态时,也无法设置伺服打开或点动。在这种情况下, 软件恢复 模式用于将机械手重置为正常。
-
包装模式:对于包装和运输机械手,可以将机械手设置为预定义的运输值(超出正常操作角度限制)。
如果在启动恢复模块时启用伺服,则会出现以下弹出窗口,伺服将自动关闭。
使用软件恢复模式
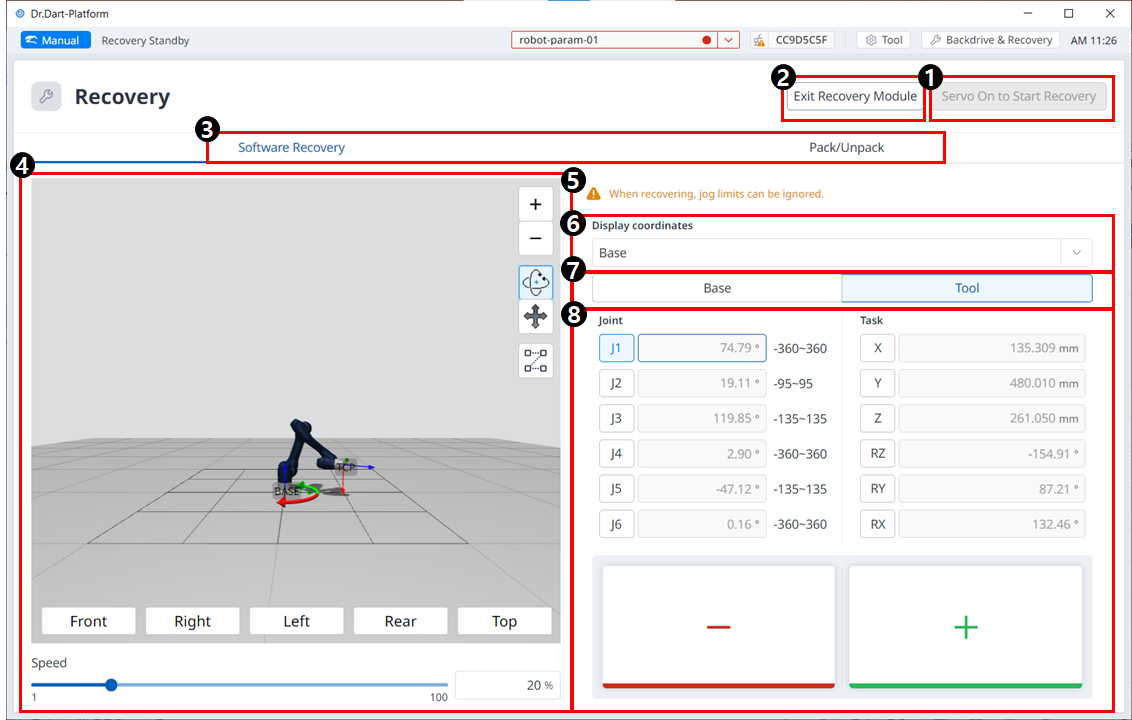
软件恢复模式
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
伺服打开以开始恢复 |
此按钮用于在进入恢复模式之前启用伺服。 |
|
2 |
退出恢复 |
此按钮允许您退出恢复模块。 |
|
3 |
标题 |
此部分允许您选择"软件恢复"模式或"打包/解包"模式。 |
|
4 |
3D仿真 |
此区域允许您预览设置值的3D模拟。 |
|
5 |
警告消息 |
这说明了预防措施。 |
|
6 |
显示坐标 |
您可以在此处设置基于Base或World的坐标。 |
|
7 |
底座/工具按钮 |
这是您可以根据基本或工具设置值的地方。 |
|
8 |
联合/任务 |
此部分允许您输入所需的值以使机械手移动。 |
要使用软件恢复模式,请按照以下步骤操作:
-
点击 标题窗格中的Recovery (恢复)菜单。"软件恢复"屏幕自动出现在"恢复"窗口中。
-
轻触软件恢复屏幕右侧的每个连接按钮,然后使用
-
有关驾驶舱按钮的定义,请参阅驾驶舱 初始位置和驾驶舱
-
对设置所做的更改将实时反映在左侧的模拟窗口中。
-
-
设置完成后,点击左上方的X按钮关闭窗口。
小心
当接头角度限制超过3度时,软件修复模式不可用。
使用打包/解包
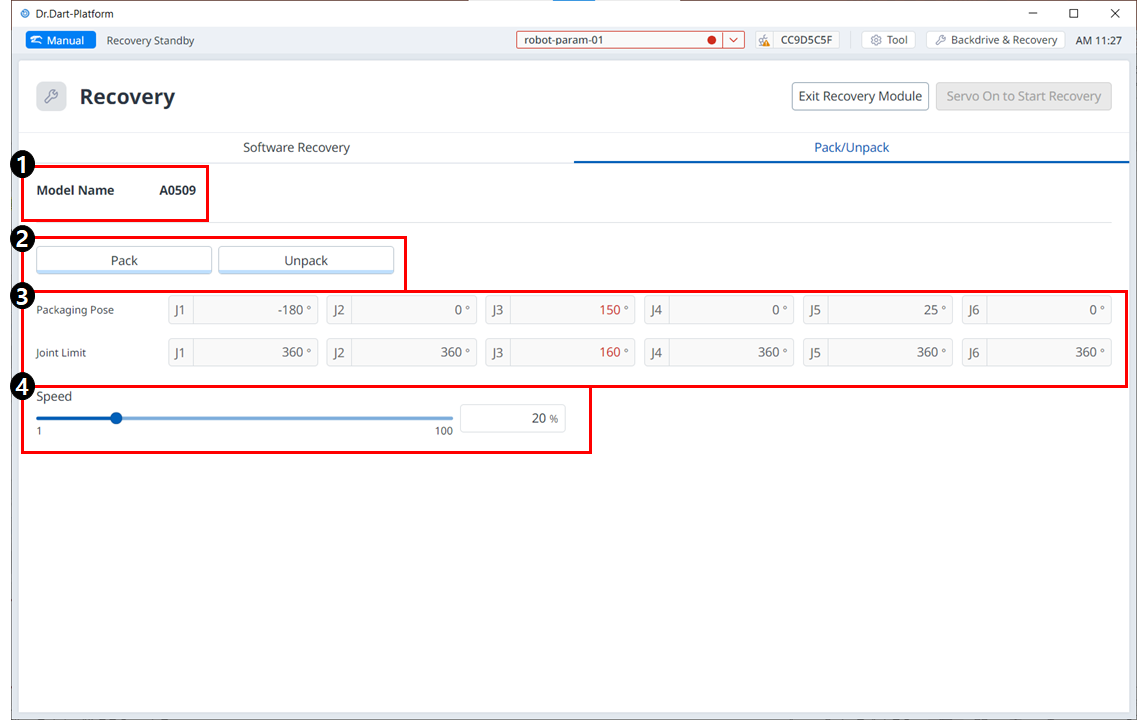
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
型号名称 |
此时将显示连接的机械手型号的名称。 |
|
2 |
打包/解包 |
可以选择打包或解包。 |
|
3 |
包装姿势/接合限制 |
出现姿势和关节极限值。 |
|
4 |
速度比 |
打包或解包模式的速度可通过滑块或输入进行调整。 |
要配置打包模式,请执行以下步骤:
-
点击 标题窗格中的Recovery(恢复)菜单。

-
选择 打包模式 选项卡。

-
点击 Servo On to Start Recovery (伺服开启以开始恢复)按钮以启用打包模式。

-
机械手自动移动到设定的包装姿势。
-
使用 "打包 "按钮可以将机械手置于"打包"位置,使用 "解包"按钮可以将机械手置于"默认起始位置"。
-