每个机械手系列的功能限制
不同的机械手系列(A,AS,E,M/H,P系列)限制了以下功能的使用:
-
基于电流:使用位于每个接头上的电动机的电流。
-
基于FTS:使用位于机械手末端的FTS (力矩传感器)。
-
基于JTS:使用位于每个接头上的JTS (接头扭矩传感器)。
|
功能 |
A/E系列(基于电流) |
A系列S (电流,基于FTS) |
M系列(基于JTS) |
H系列(基于JTS) |
P系列(基于JTS) |
|---|---|---|---|---|---|
|
直接教学
|
o |
o (基于电流) |
o |
o |
o |
|
直接教学
|
X |
o (基于FTS) |
o |
o |
o |
|
碰撞检测 |
o |
o (基于电流) |
o |
o |
o |
|
安装姿势测量 |
X |
o (基于FTS) |
o |
X (机械手只能安装在地板上) |
X (机械手只能安装在地板上) |
|
刀具重量测量 |
X |
o (基于FTS) |
o |
o |
o |
|
工件重量测量 |
X |
o (基于FTS) |
o |
o |
o |
|
微移功能 |
X |
X |
o |
o |
o |
|
力控制 |
o (设置仅在三个平移方向上可用,不包括旋转) |
o (基于FTS) |
o |
o |
o |
|
合规性控制 |
o (设置仅在三个平移方向上可用,不包括旋转) |
o (基于FTS) |
o |
o |
o |
每个机械手系列的力监控功能限制
教学手控盒和DART-Studio可用于监控力数据。DRL命令(check_force_condition())也可用于外部监控力数据。
-
如果码垛模式设置为"On"(开):除了H,P系列机械手之外,关闭状态下提供的相同控制/监控功能也可用。
|
功能 |
A/E系列(基于电流) |
A系列S (基于电流和FTS) |
M系列(基于JTS) |
H系列(基于JTS) |
P系列(基于JTS) |
|---|---|---|---|---|---|
|
力控制 |
o (设置仅在三个平移方向上可用,不包括旋转) |
o (基于FTS) |
o |
o |
o |
|
o (如果码垛模式设置为"On"(开):力控制输出受限(Base Rx,RY方向) 1) |
o (如果码垛模式设置为"On"(开):力控制输出受限(Base Rx,RY方向) 1) |
||||
|
合规性控制 |
o (设置仅在三个平移方向上可用,不包括旋转) |
o (基于FTS) |
o |
o |
o |
|
o (如果码垛模式设置为"On"(开):顺应性控制输出受限(Base Rx,RY方向) 1) |
o (如果码垛模式设置为"On"(开):顺应性控制输出受限(Base Rx,RY方向) 1) |
||||
|
部队监测 (教学手控盒) |
X |
o (基于FTS) |
o (奇异性部分显示的力值为"0") |
o (奇异性部分显示的力值为"0") |
o (奇异性部分显示的力值为"0") |
|
o (如果码垛模式设置为"On"(开):为底座提供4自由度(x,y,z,Rz)) |
o (如果码垛模式设置为"On"(开):为底座提供4自由度(x,y,z,Rz)) |
||||
|
部队监测 (DART-Studio) |
o (奇异性部分显示的力值为"0") |
o (基于FTS) |
o (奇异性部分显示的力值为"0") |
o (奇异性部分显示的力值为"0") |
o (奇异性部分显示的力值为"0") |
|
o (如果码垛模式设置为"On"(开):为底座提供4自由度(x,y,z,Rz)) |
o (如果码垛模式设置为"On"(开):为底座提供4自由度(x,y,z,Rz)) |
||||
|
部队监测 (使用DRL命令时:
|
o (奇异性部分显示的力值为"0") |
o (基于FTS) |
o (奇异性部分显示的力值为"0") |
o (奇异性部分显示的力值为"0") |
o (奇异性部分显示的力值为"0") |
|
o (如果码垛模式设置为"On"(开):为底座提供4自由度(x,y,z,Rz)) |
o (如果码垛模式设置为"On"(开):为底座提供4自由度(x,y,z,Rz)) |
控制输出限制(Base Rx,RY方向):对应于基Rx,RY方向的力或顺应性控制值的力或顺应性控制值不会输出。输入相关轴(Base Rx,ry)的力或顺应性控制值将被忽略为"0"。
奇异性概述
在多接头机器人中奇异性是指机器人在移动过程中难以计算下一个姿势的位置(或点)。多接头机器人根据机器人端部计算移动过程中的每个接头角度
例如,在图 下图1,当机器人移动到红点时,机器人将无法确定是移动其关节以设置姿势A还是姿势B,如图 2.这个位置(或点)被称为奇异性。
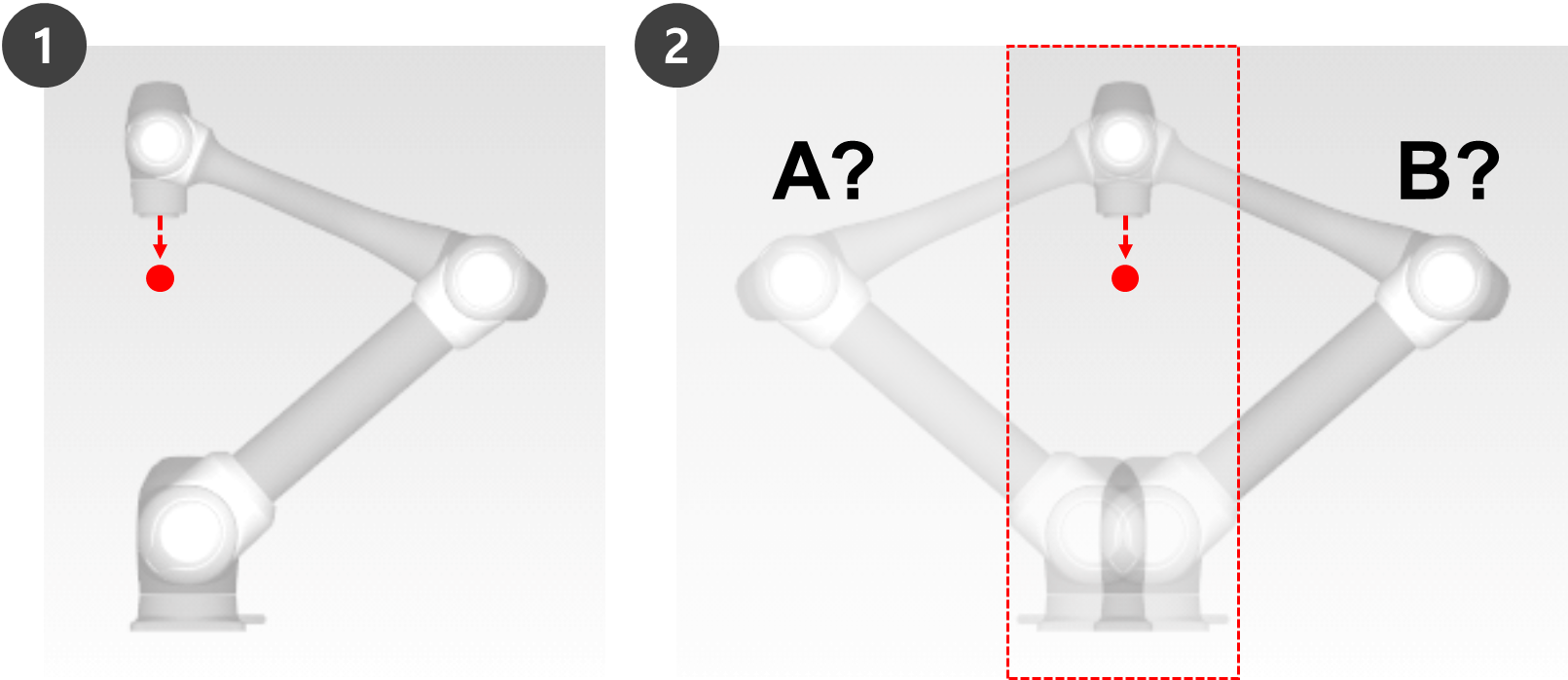
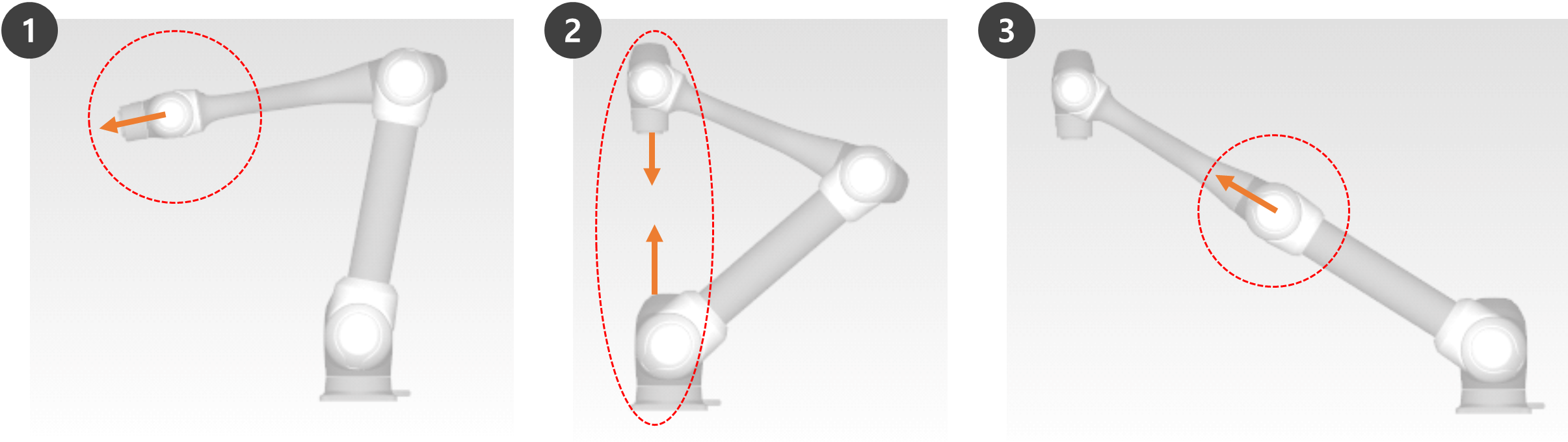
接近奇异性, 机器人在平面,点和线方面的运动不流畅, 机器人端线性运动可能无法保持, 控制过程中的位置误差可能会增加。如下图所示,在3种情况下出现奇异性,包括机械手接头形成一条线时。
-
手腕奇点:当机器人手腕在轴5接近0º 时形成一条线
-
与人的手臂相比, 4,5和6轴对应于手腕关节。
-
-
肩部奇点:当轴1和轴6位于同一行时
-
与人的手臂相比, 轴1和2对应于肩部关节。
-
-
弯管奇异性:当机器人在轴3接近0º 时形成一条直线
-
与人的手臂相比, 轴3对应于肘部。
-
小心
-
手动和自动操作与接头旋转不受奇异性的影响。
-
关节运动,MoveJ命令等
-
-
奇异性仅在手动和自动操作过程中发生,机械手结束执行线性运动。
-
任务移动,MoveL命令等
-
-
在奇异性区域中,力控制或合规控制不可用。
-
当线性运动通过奇异性时,某些轴的旋转速度会迅速增加,因此可能会出现违反关节速度限制或违反关节角度限制的情况。
如何避免奇异性
斗山机器人提供了避免运动控制过程中奇异性的选项。但是,建议在奇点区域中使用MoveJ等连接运动命令配置不创建异常的任务。
以下是斗山机器人提供的奇异性规避选项:
-
自动避让:通过避免奇异性来执行运动。但是,机械手的运动可能与预期路径不同。
-
路径优先级:保持路径和速度,但可能会因接近奇点的错误而停止。
-
变速:保持路径,但减速接近奇异性。
欧拉角概述
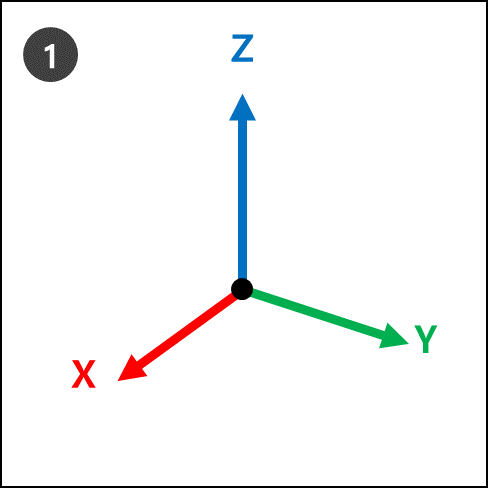
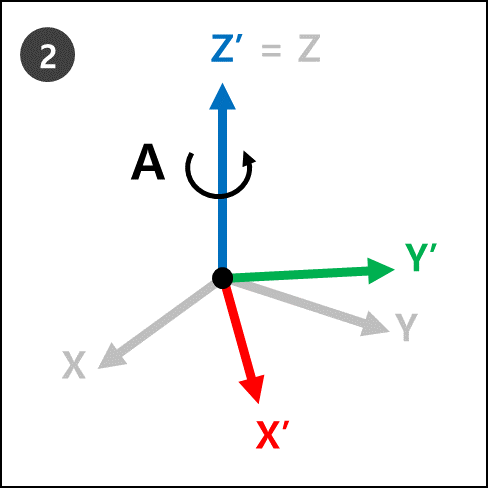
欧拉角是一种表达X,Y和Z轴角度的方法, 它们在物体方向上是垂直的。A,B和C是指顺序旋转角度。每个机器人制造商都定义了不同的A,B和C旋转顺序, 例如 Rz-ry-Rz,Rz-ry-Rx 或 Rx-ry-Rz。
例如, Rz-ry-rx。此处, Rz 表示Z轴的旋转, RY 表示Y轴的旋转,Rx 表示X轴的旋转。Rz可以表示为角度A,Ry表示为角度B,Rx表示为角度C,以指示对象的当前旋转方向。请注意,一旦从坐标沿Z轴方向旋转,将根据新坐标进行旋转。
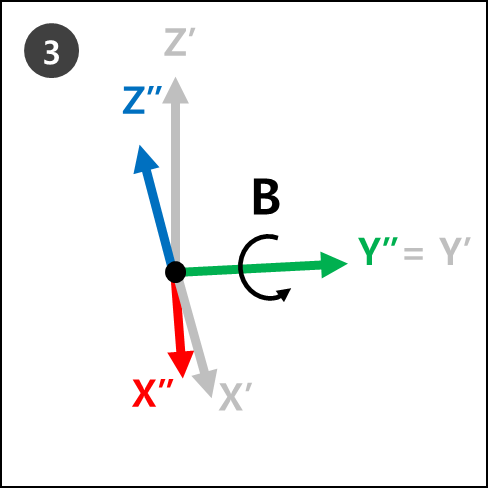
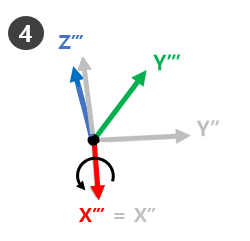
这可以通过步骤1至4可视化。
|
|
|
|
-
步骤4的新坐标(Z''''',Y'''',X''''是指应用欧拉角A,B和C时的当前机器人旋转。
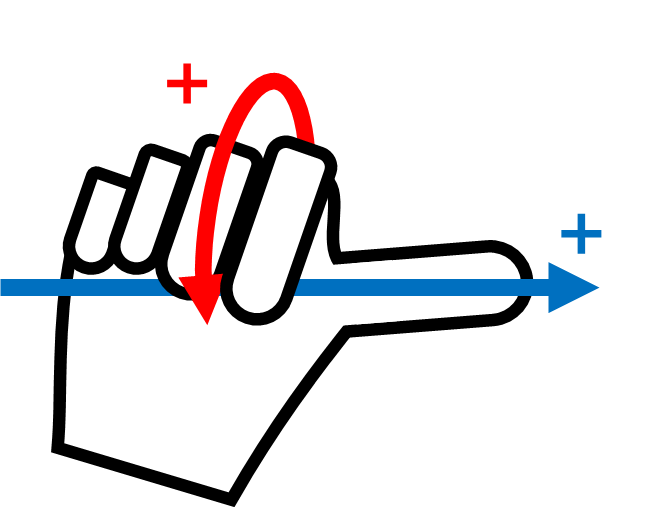
用右手可以很容易地看出这一点。用右手做以下姿势。这被称为右手规则, 使拇指(X轴),食指(Y轴)和中指(Z轴)相互垂直将创建由X轴,Y轴和Z轴组成的坐标。
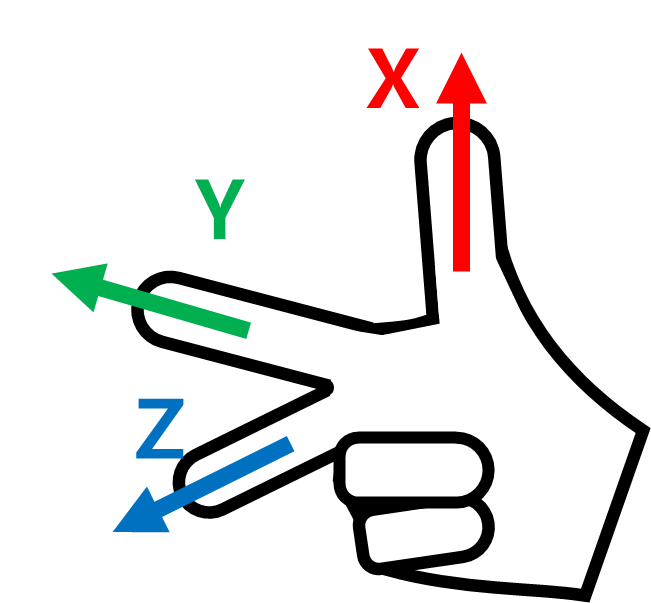
然后进行右边的Rule笛卡尔坐姿,并按顺序旋转Rz,Ry和Rx。
-
RZ:将中指(Z轴)旋转一度。
-
干:将食指(Y轴)旋转B度。
-
处方:将拇指(X轴)旋转C度。
注意
A,B和C的+旋转方向的+旋转方向是指除拇指外的四个手指的方向,当拇指指向+方向且四个手指被夹紧时。这被称为顺时针螺钉定律。