Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
选择面板类型 |
您可以选择移动按钮的位置。 |
|
2 |
3D仿真 |
这是3D查看器, 在这里你可以看到机器人的外观。 |
|
3 |
模拟器对齐 |
您可以利用此部分来操控模拟机。 |
|
4 |
使用增量 |
此按钮允许您启用角度或位置增量。 |
|
5 |
角度增量 |
此部分是选定轴上的角度增量设置的位置。 |
|
6 |
位置增量 |
此部分用于设置选定轴上的位置增量。 |
|
7 |
碰撞 |
此字段是设置机械手碰撞的位置。 |
|
8 |
强制监控 |
在此部分中,您可以根据基体,工具,世界,参考等设置X,Y和Z轴中的力。 |
|
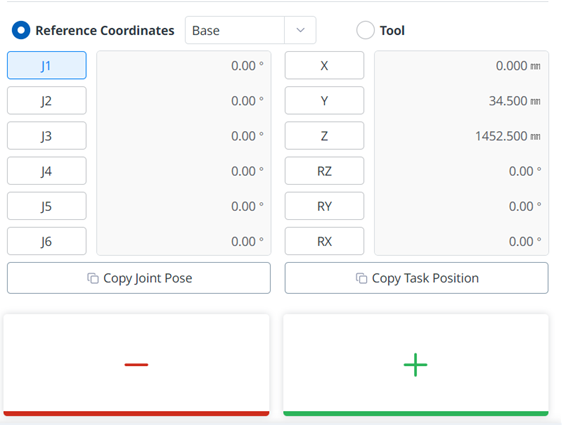
9 |
选择参考坐标系 |
选择要用于图11中的任务坐标的参考坐标系。您可以选择基准坐标,世界坐标或用户坐标。 |
|
10 |
联合面板 |
您可以选择要转折的接合轴。 |
|
11 |
任务面板 |
您可以选择要转折的任务轴。 |
|
12 |
复印姿势J按钮 |
此按钮允许您复制Position J。 |
|
13 |
复制姿势X按钮 |
此按钮允许您复制POSE X。 |
|
14 |
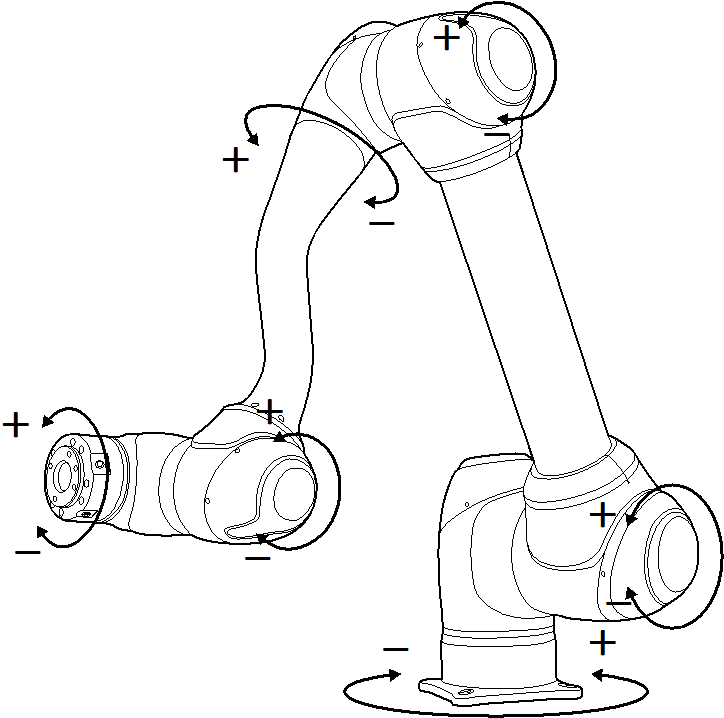
移动-按钮 |
您可以让机器人根据每个轴沿-方向移动。此时,您可以在左侧的3D模拟中找出-和+的方向。 |
|
15 |
Move +(移动+)按钮 |
您可以让机器人根据每个轴沿+方向移动。此时,您可以在左侧的3D模拟中找出-和+的方向。 |
根据机械手接头执行
要根据机械手接头调整角度,请执行以下步骤:
-
选择轴(J1-J6)以调整接合面板上的角度。
-
按住方向按钮(


基于机械手底座执行
要根据机械手的基准坐标移动机械手,请执行以下步骤:
-
选择 基体 作为参考坐标系。
-
在 任务面板中,选择要调整角度的轴(X~RX)。
-
按住方向按钮(+,-)可移动相应的轴。
基于世界坐标执行
要根据世界坐标移动机械手,请按照下列步骤操作:
-
选择 World 作为参考坐标系。
-
在 任务面板中,选择要调整角度的轴(X~RX)。
-
按住方向按钮(+,-)可移动相应的轴。
基于机械手工具执行
要根据机械手工具移动机械手,请执行以下步骤:
-
选择 工具 作为参考坐标系。
-
在 任务面板中,选择要调整角度的轴(X~RX)。
-
按住方向按钮(+,-)可移动相应的轴。
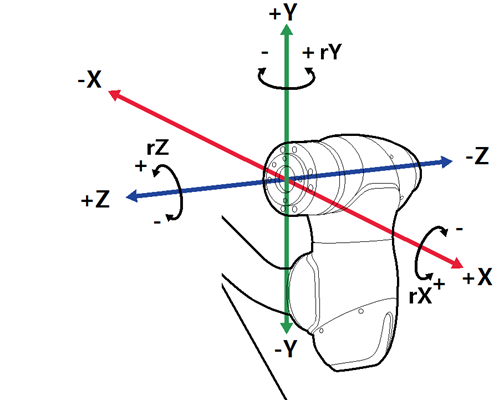
注意
-
安全区域不适用于虚拟模式。
-
Rx,RY和Rz根据TCP (刀具中心位置)执行。