|
否 |
项目 |
说明 |
|---|---|---|
|
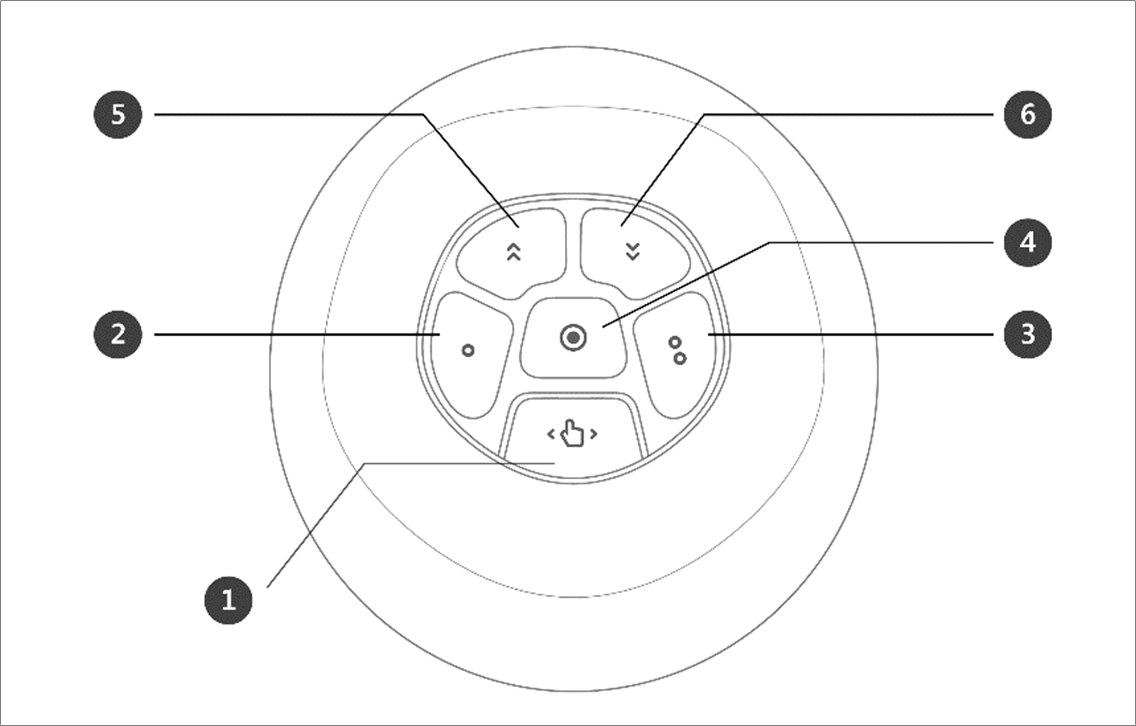
1 |
手导按钮 |
此按钮可用于调整或更改机械手的姿势。 |
|
2, 3 |
用户设置按钮 |
此按钮可以根据与模式对应的锁定条件输入姿势来修改机器人的姿势。
|
|
4 |
保存姿势按钮 |
保存当前机器人姿势。 |
|
5 |
一行 |
将屏幕上显示的焦点向上移动一行 |
|
6 |
下行一行 |
将屏幕上显示的焦点向下移动一行 |
直接教学(手动引导)
手动引导用于用双手握住机器人末端,将机器人推拉至所需的姿势,并将该姿势应用于当前选定的动作。
有两种直接教学方法。
-
Freedrive:每个接头沿用户施加力的方向移动
-
约束运动:即使从随机方向施加力,机械手端也只能按照约束运动中设定的方向移动或旋转
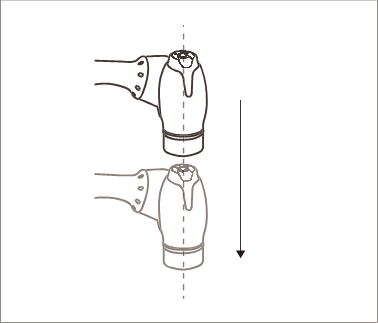
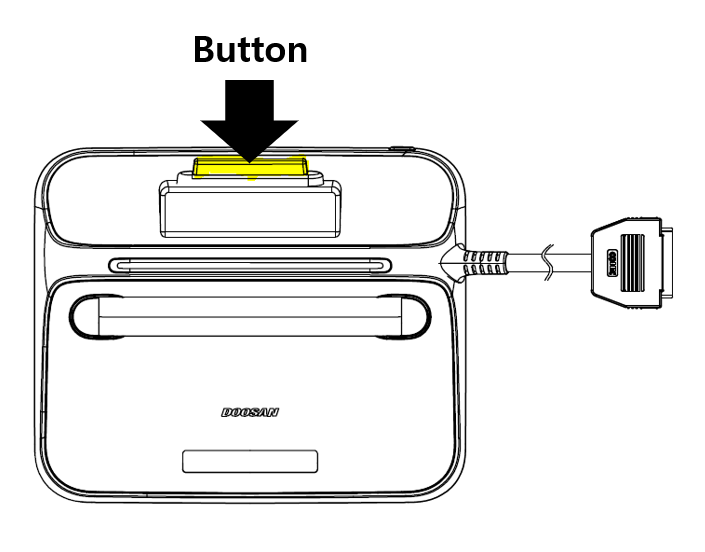
Freedrive
按下按钮1后,Freedrive模式将被激活,从而允许机械手自由移动。每个接头沿用户施加力的方向移动。一旦松开按钮,机械手就不能用手移动。
-
在直接教学过程中,机械手LED呈青色闪烁。
-
按下教学手控盒背面的手控盒按钮将激活Freedrive模式,就像按下按钮1一样,机器人可以自由移动。
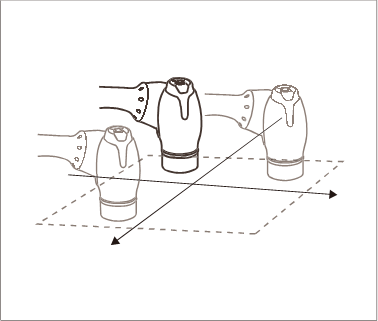
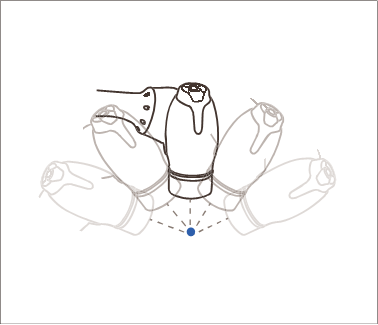
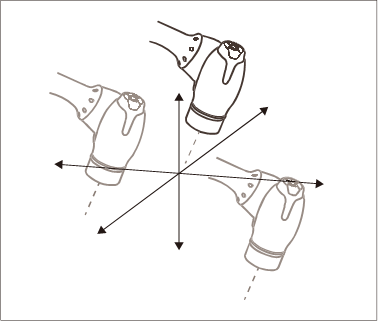
约束运动
按下按钮2和按钮3时,机械手端部仅在与约束条件匹配的方向移动,即使从随机方向施加力也是如此。可以使用下图中的4个条件中的2个设置约束条件:Z轴约束,平面固定约束,曲面约束和方向约束。
驾驶舱按钮设置
Unknown Attachment
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
驾驶舱图像 |
这是Cockpit设置的图像。 |
|
2 |
重置 |
使用此按钮可以初始化设置值。 |
|
3 |
1按钮设置 |
这是您可以在其中选择要为按钮1设置的功能的部分。 |
|
4 |
2按钮设置 |
这是您可以在其中选择要为按钮2设置的功能的部分。 |
|
5 |
1+2按钮设置 |
这是您可以选择是否启用按钮1+2的夹紧部分。 |
|
6 |
引导图像 |
Cockpit设置项目的指导图像。 |
获取Cockpit按钮状态
用户可以获取有关是否按下或释放驾驶舱按钮的信息。
机器人提供了控制驾驶舱按钮的功能,使其可用于各种应用。
-
通信API中的"监控数据"提供有关Cockpit按钮的信息。
-
如果您按下机器人的驾驶舱按钮或反之亦然, 您可以通过DRL API检测到它。
-
DRL API:get_cockpit_input (请参阅编程手册。)
-
参数:(INT)索引
-
退货:(Int) 1:按下 (按下按钮), 0:松开 (按钮未按下)
-