Unknown Attachment
Menu
|
Items |
Beschrijving |
|
|---|---|---|
|
1 |
Selecteer het type paneel |
U kunt de locatie van de knop verplaatsen kiezen. |
|
2 |
3D-simulatie |
Dit is de 3D-viewer, waar je kunt zien hoe de robot eruit ziet. |
|
3 |
Simulator uitlijnen |
U kunt deze sectie gebruiken om de simulator te sturen. |
|
4 |
Gebruik verhoging |
Met deze knop kunt u hoek- of positiestappen inschakelen. |
|
5 |
Hoek verhogen |
In dit gedeelte wordt de hoekverhoging op de geselecteerde as ingesteld. |
|
6 |
Positie verhogen |
In dit gedeelte wordt de positieverhoging op de geselecteerde as ingesteld. |
|
7 |
Botsing |
In dit veld stelt u de botsbotsing in. |
|
8 |
Bewaking van kracht |
In dit gedeelte stelt u de krachten in de X-, Y- en Z-assen in op basis van onder andere basis, gereedschap, wereld, Referentie. |
|
9 |
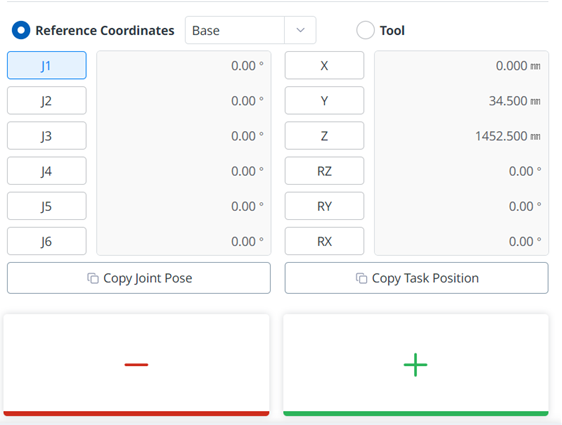
Selecteer het referentiecoördinatensysteem |
Selecteer in figuur 11 het referentiecoördinatensysteem dat voor de taakcoördinaten moet worden gebruikt. U kunt kiezen uit Base, World of User Coordinates. |
|
10 |
Verbindingsplaat |
U kunt de te verplaatsen as selecteren. |
|
11 |
Taakvenster |
U kunt de taakas selecteren die u wilt verschuiven. |
|
12 |
Knop E kopiëren |
Met deze knop kunt u pose J. |
|
13 |
Knop E-positie kopiëren |
Met deze knop kunt u pose X kopiëren |
|
14 |
Knop Move - |
U kunt de robot in de richting - laten bewegen op basis van elke as. Op dit moment kunt u de richting van de - en + uitzoeken op de 3D-simulatie aan de linkerkant. |
|
15 |
Beweeg de + knop |
U kunt de robot in de + richting laten bewegen op basis van elke as. Op dit moment kunt u de richting van de - en + uitzoeken op de 3D-simulatie aan de linkerkant. |
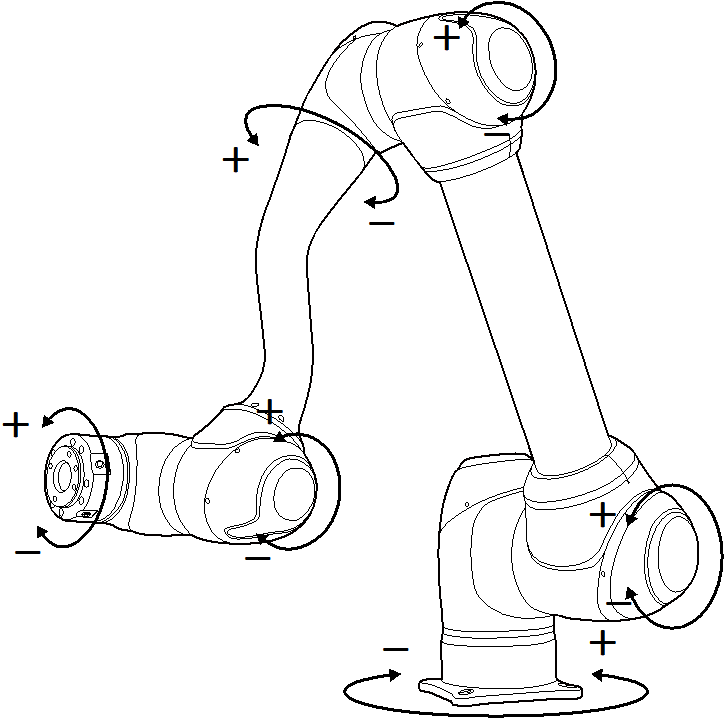
Uitvoeren op basis van Robot Joint
Ga als volgt te werk om de hoek aan te passen op basis van de robotverbinding:
-
Selecteer de as (J1-J6) om de hoek op het verbindingspaneel aan te passen.
-
Houd de richtingsknoppen (


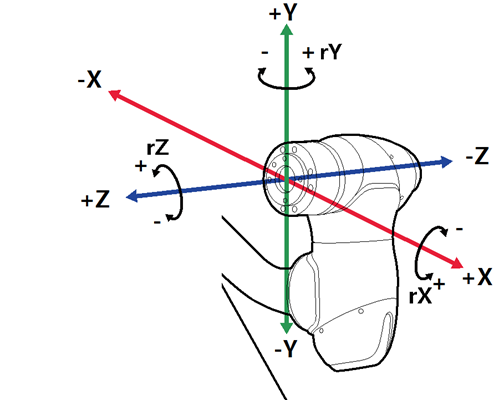
Uitvoeren op basis van Robot Base

Volg deze stappen om de robot te verplaatsen op basis van de basiscoördinaten:
-
Selecteer de basis als referentiecoördinatensysteem.
-
Selecteer in het taakvenster de as (X~RX) waarvoor u de hoek wilt aanpassen.
-
Houd de richtingsknop (+,-) ingedrukt om de bijbehorende as te verplaatsen.
Uitvoeren op basis van World Coordinates

Volg deze stappen om de robot te verplaatsen op basis van World Coordinates:
-
Selecteer World als referentiecoördinatensysteem.
-
Selecteer in het taakvenster de as (X~RX) waarvoor u de hoek wilt aanpassen.
-
Houd de richtingsknop (+,-) ingedrukt om de bijbehorende as te verplaatsen.
Uitvoeren op basis van Robot Tool

Volg deze stappen om de robot te verplaatsen op basis van het robotgereedschap:
-
Selecteer het gereedschap als referentiecoördinatensysteem.
-
Selecteer in het taakvenster de as (X~RX) waarvoor u de hoek wilt aanpassen.
-
Houd de richtingsknop (+,-) ingedrukt om de bijbehorende as te verplaatsen.
Opmerking
-
Veiligheidszone is niet van toepassing in de virtuele modus.
-
RX, Ry en RZ worden uitgevoerd volgens TCP (middelste positie van het gereedschap).