Componentenlijst
|
|
|
Manipulator |
Controller (optioneel (optioneel: Zie bijlage) |
|
|
|
Leer hanger |
Voedingskabel van de controller |
|
|
|
Aansluitkabel manipulator |
Gebruikershandleiding / snelgids |
Naam van elk onderdeel en functie
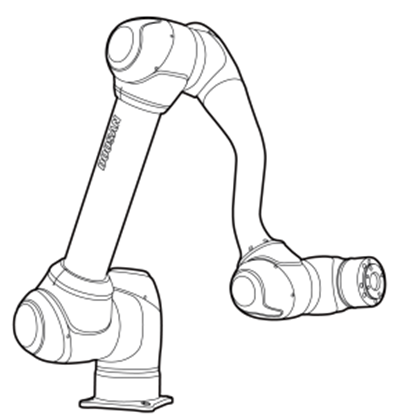
Manipulator
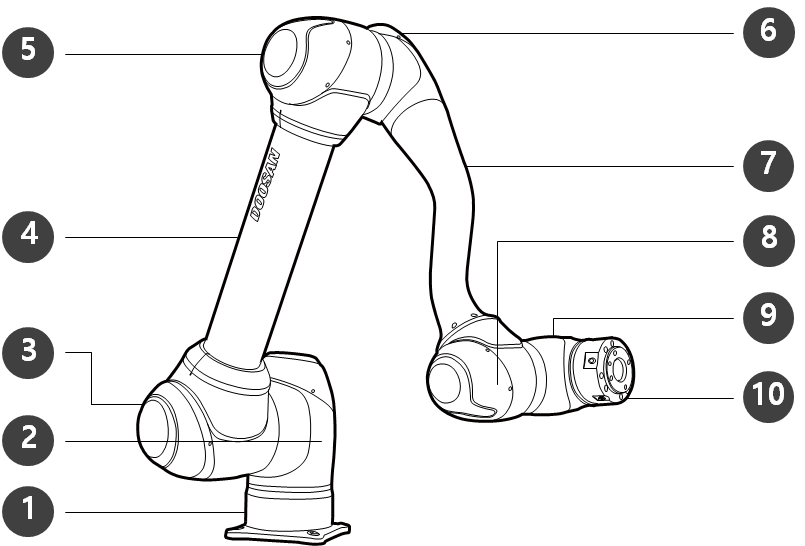
Naam van elk onderdeel
|
No. |
Naam |
No. |
Naam |
|---|---|---|---|
|
1 |
Basis |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Link1 |
9 |
J6 |
|
5 |
J3 |
10 |
Gereedschapsflens |
ㅤ
Belangrijkste functies
|
No. |
Items |
Beschrijving |
|---|---|---|
|
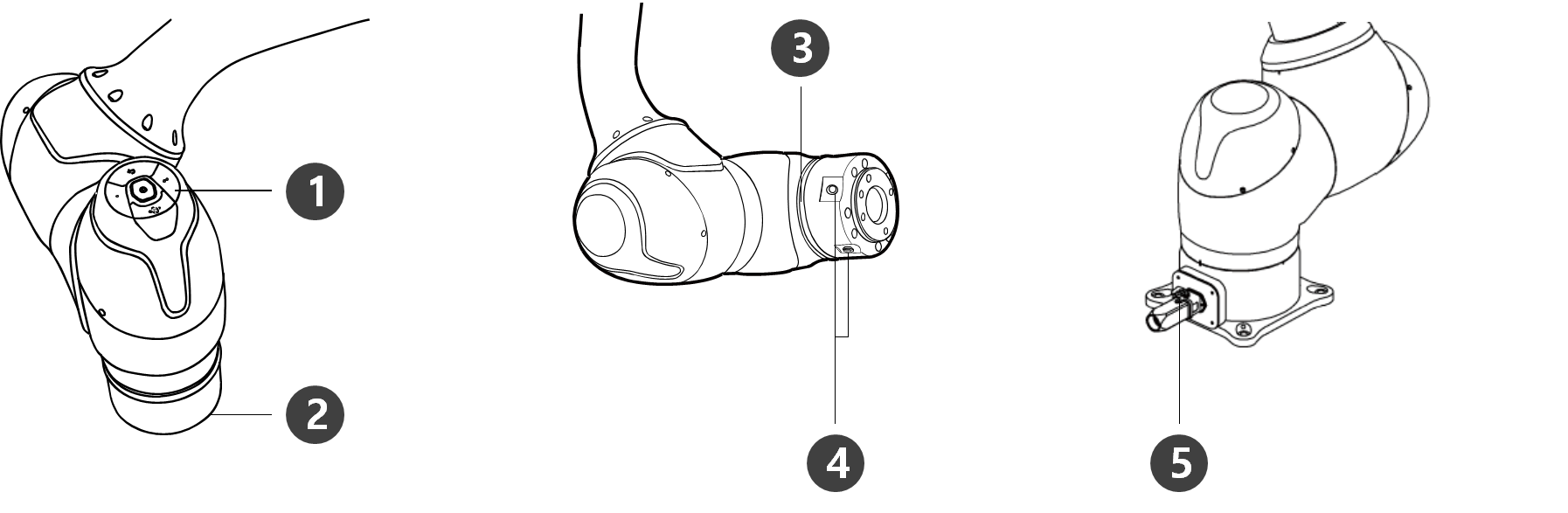
1 |
Cockpit |
[Optioneel] bedieningstoetsen voor directe instructie en bediening |
|
2 |
Gereedschapsflens |
Gebied voor het installeren van gereedschappen. |
|
3 |
3 |
Geeft de robotstatus met verschillende kleuren weer. Voor meer informatie over de robotstatus, zie de Status en flens LED kleur voor elke modus. Versie: H-serie De H-serie wordt geleverd met een extra LED op de 1-as die dezelfde status en kleur aangeeft. |
|
4 |
Flens I/O |
I/O-poort voor gereedschapsbesturing.
|
|
5 |
Connector |
Wordt gebruikt voor het leveren van stroom aan en communicatie van de robot. |
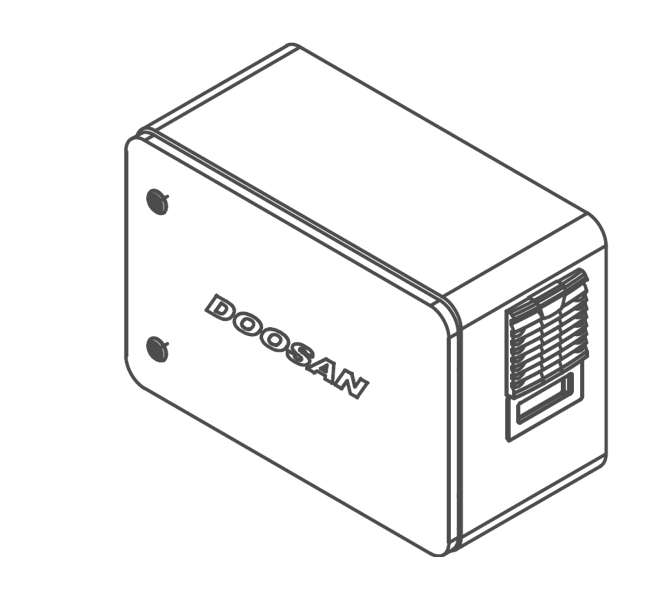
Controller
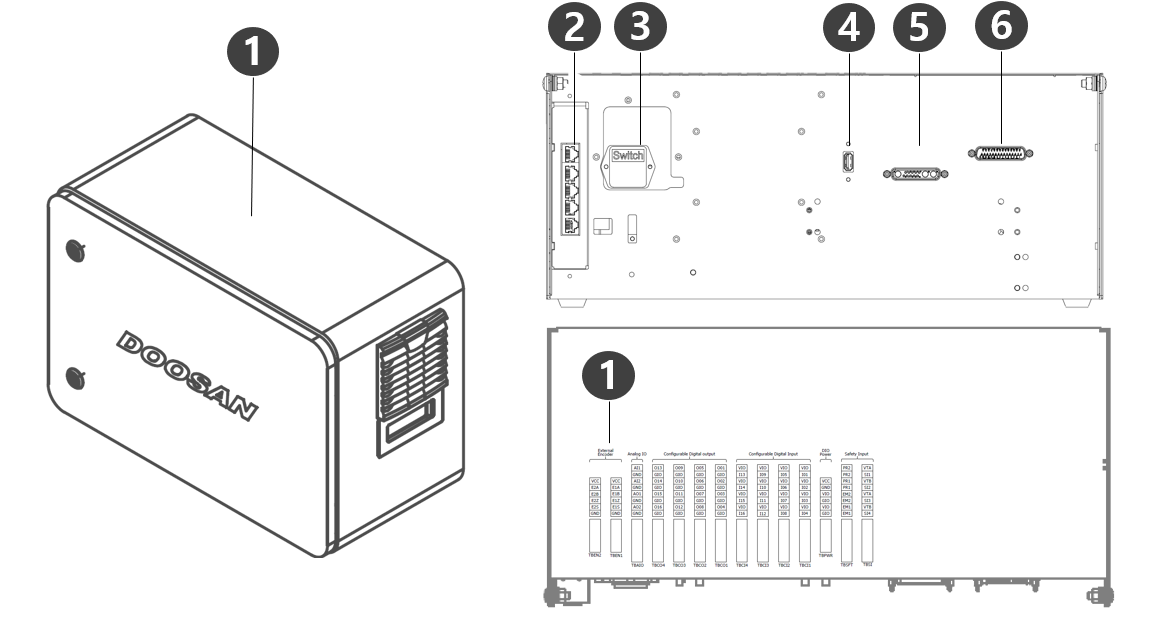
|
No. |
Items |
Beschrijving |
|---|---|---|
|
1 |
I/O-aansluitklem (intern) |
Het kan worden aangesloten op controllers of randapparatuur van andere robots. |
|
2 |
Aansluiting voor netwerkverbinding |
Wordt gebruikt voor aansluiting op de netwerkaansluitklem in de controller om laptops, TCP/IP-apparaten en en Modbus-apparatuur te gebruiken. |
|
3 |
Aansluiting/schakelaar voor de stroomaansluiting |
Wordt gebruikt voor het aansluiten van de netvoeding van de controller om deze in of uit te schakelen. Raadpleeg het systeem in-/uitschakelen voor meer informatie. |
|
4 |
USB-aansluiting |
Wordt gebruikt voor het opslaan van logboeken die zijn gemaakt terwijl de robot in de USB-opslag werkt, of voor het exporteren en importeren van taken. |
|
5 |
Aansluitklem manipulatorkabel |
Gebruikt voor het aansluiten van de manipulatorkabel op de controller. |
|
6 |
Leer de aansluitklem van de hangende kabel |
Gebruikt voor het aansluiten van de hangende kabel van de leerfunctie op de controller. |
Opmerking
Als u een optionele controller kiest, raadpleeg dan de gebruikershandleiding in de bijlage om deze aan te sluiten voor gebruik.
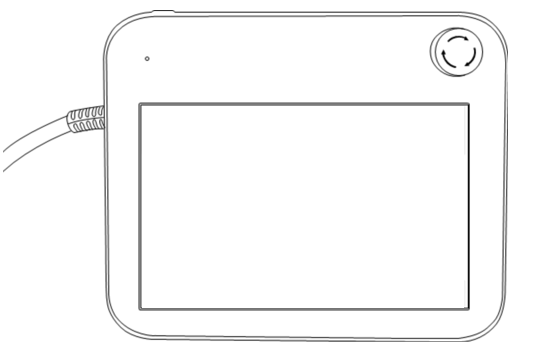
Leer hanger
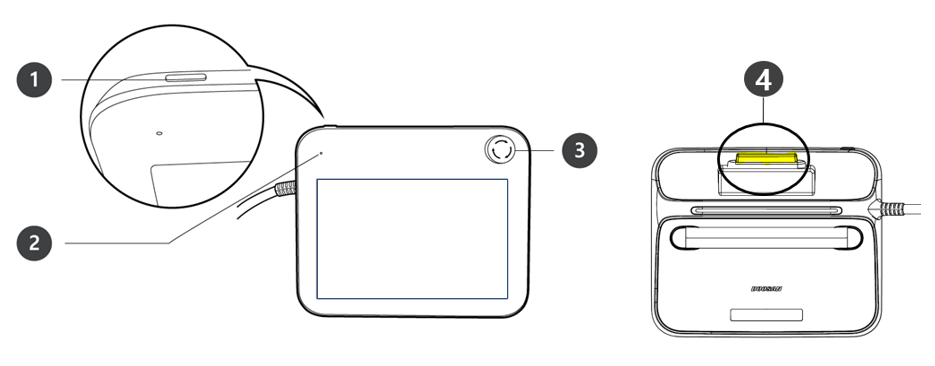
|
No. |
Items |
Beschrijving |
|---|---|---|
|
1 |
Aan/uit-knop |
|
|
2 |
Aan/uit-lampje |
|
|
3 |
Noodstopknop |
|
|
4 |
Knop voor handgeleiding (3PE schakelaar voor inschakeling met 3 standen) |
|
Opmerking
-
Als de leerhanglamp tijdens bedrijf moet worden beschermd en gemonteerd, maakt de door ons geleverde zachte afdekking het veiliger en gebruiksvriendelijker.
-
Nieuwe TP (TP-02) toegevoegde functie: Dubbele functie Handgeleider
-
De bestaande TP (TP-01) kan niet worden gebruikt in de geïntegreerde controller. (PIN-toewijzing gewijzigd vanwege 3PE-switch)
-
De nieuwe TP (TP-02) kan worden gebruikt in de bestaande controller, maar de LED wordt gewijzigd in één kleur (rood) en wordt weergegeven, en er kunnen geen extra functies worden gebruikt.
-
Systeemconfiguratie
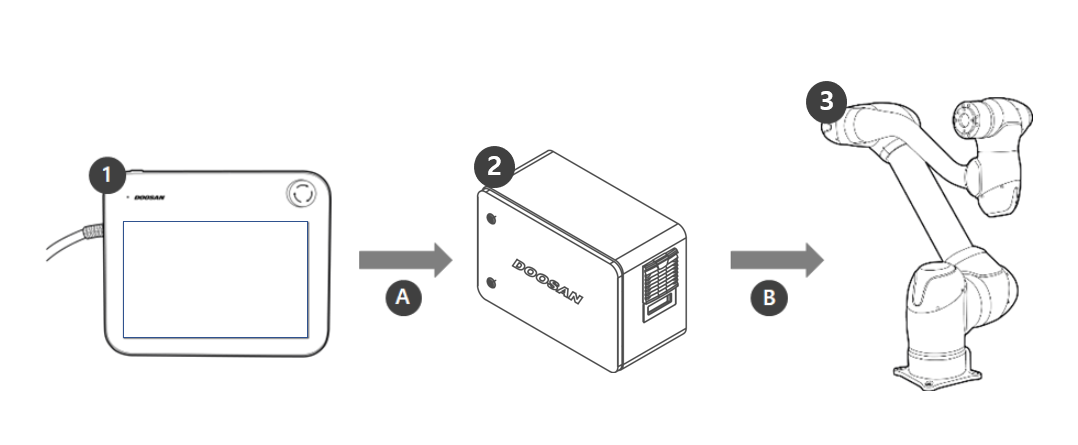
|
No. |
Naam |
Beschrijving |
|---|---|---|
|
1 |
Leer hanger |
Dit apparaat beheert het gehele systeem en is in staat om de robot specifieke poses te leren of instellingen met betrekking tot de manipulators en controllers te maken. |
|
2 |
Controller |
Deze regelt de beweging van de robot op basis van de houding of beweging die is ingesteld door de leerhanger. Het beschikt over verschillende I/O-poorten voor aansluiting en gebruik van verschillende apparatuur en apparaten. |
|
3 |
Manipulator |
Het is een industriële collaboratieve robot die transport- of assemblagetaken kan uitvoeren met verschillende gereedschappen. |
|
A |
Commando/bewaking |
|
|
B |
Voeding/netwerk |
|