Voorzichtig
Lees en volg de voorzorgsmaatregelen voordat u het monster probeert. Zie DEEL 1 voor meer informatie. Veiligheidshandleiding.
Opmerking
Voor dit voorbeeld is het Task Writer-bestand vereist dat is gemaakt in Try Compliance-opdrachtvoorbeelden
-
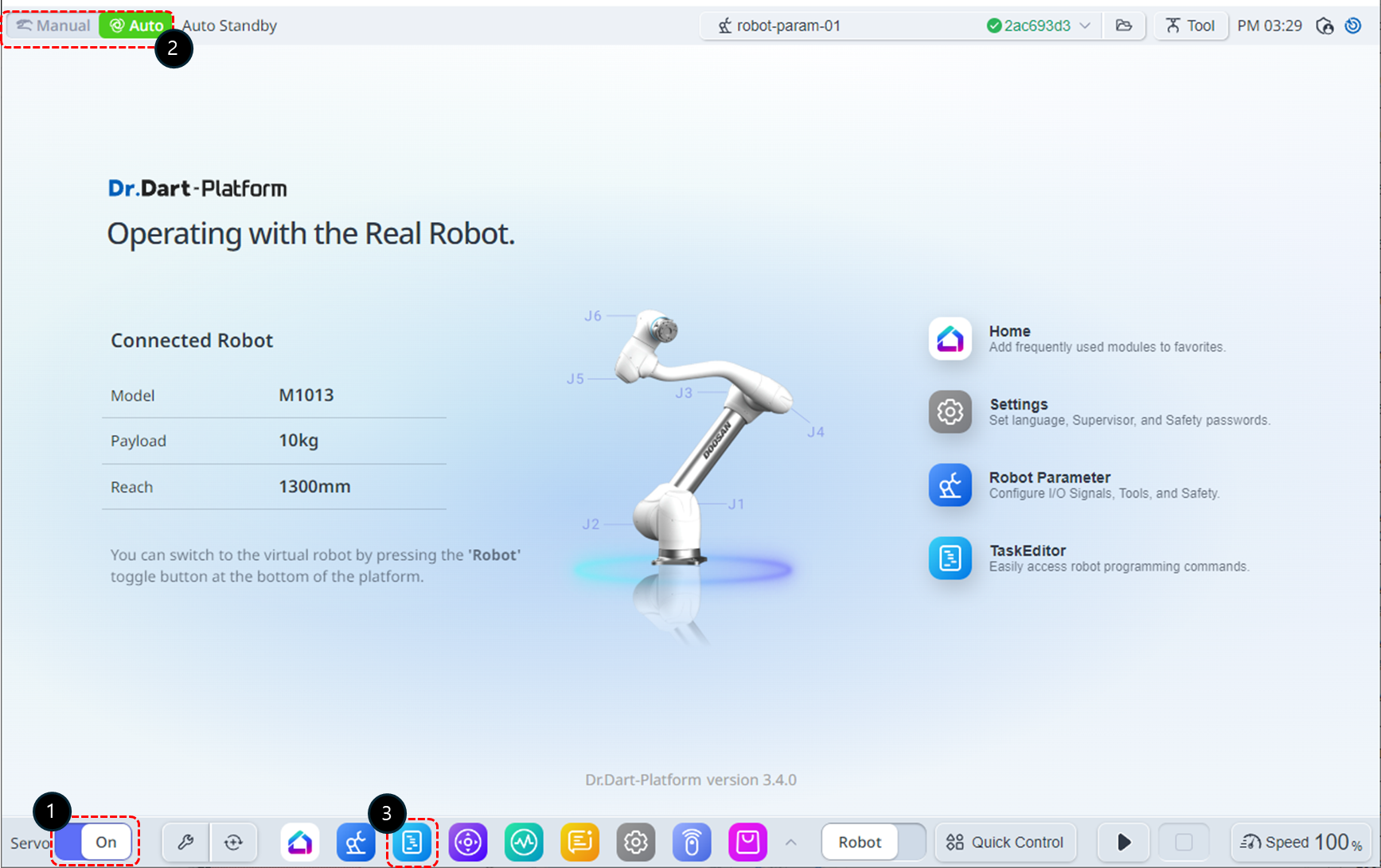
Wijzig de Servo-status in aan.
-
Schakel de bedrijfsmodus naar handmatig.
-
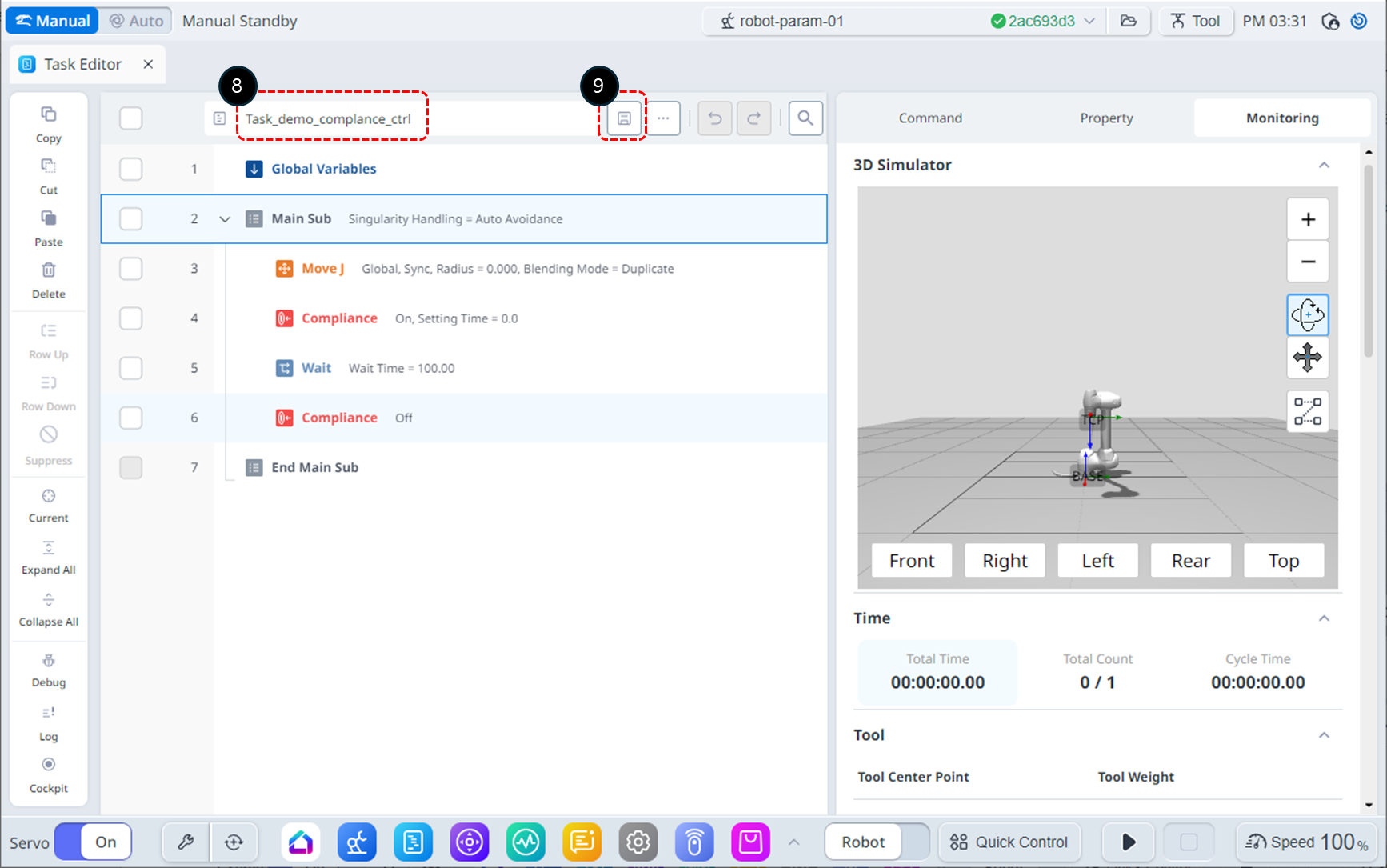
Selecteer de module Taakeditor in het onderste menu.
-
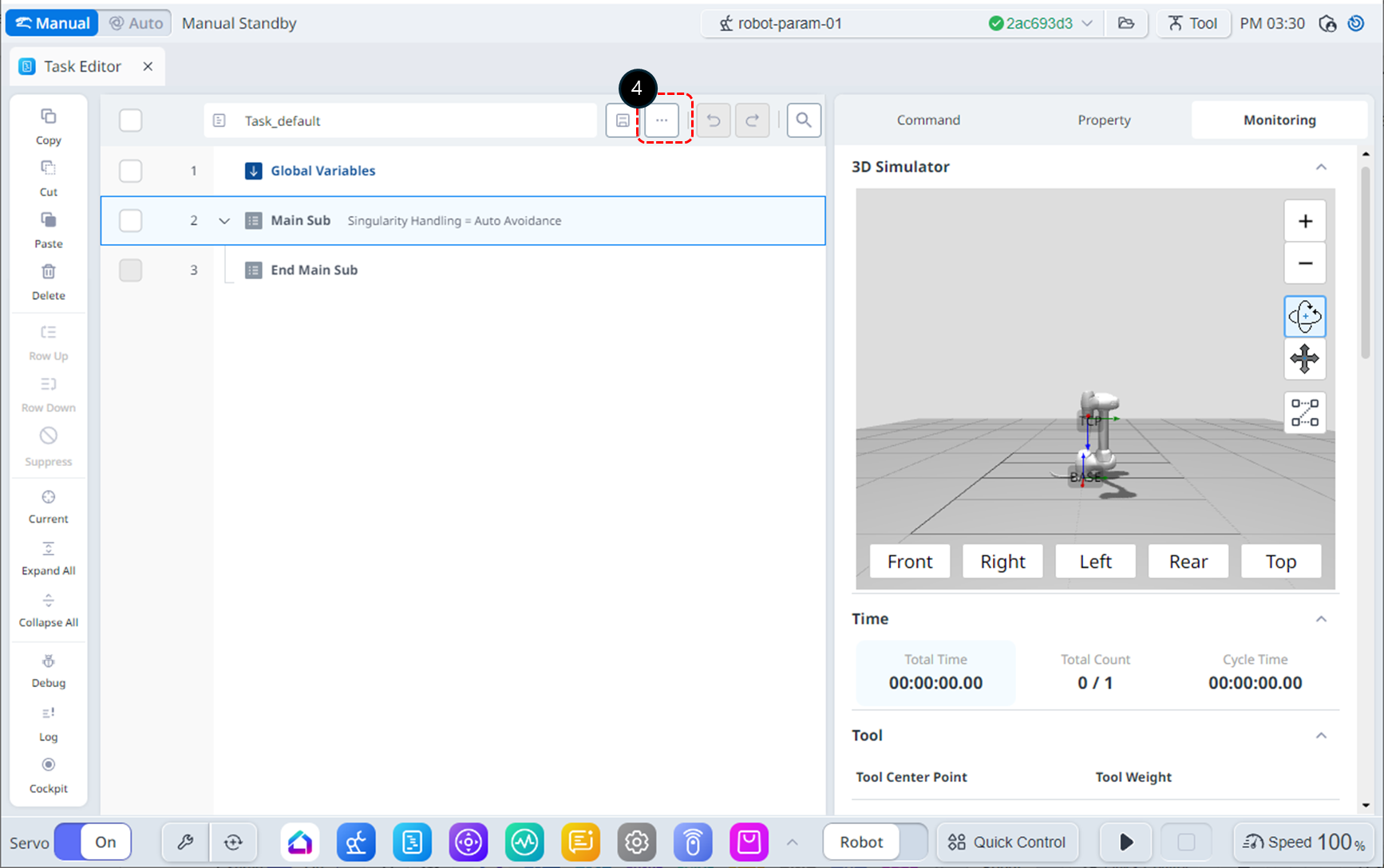
Klik op de knop Bestand.
-
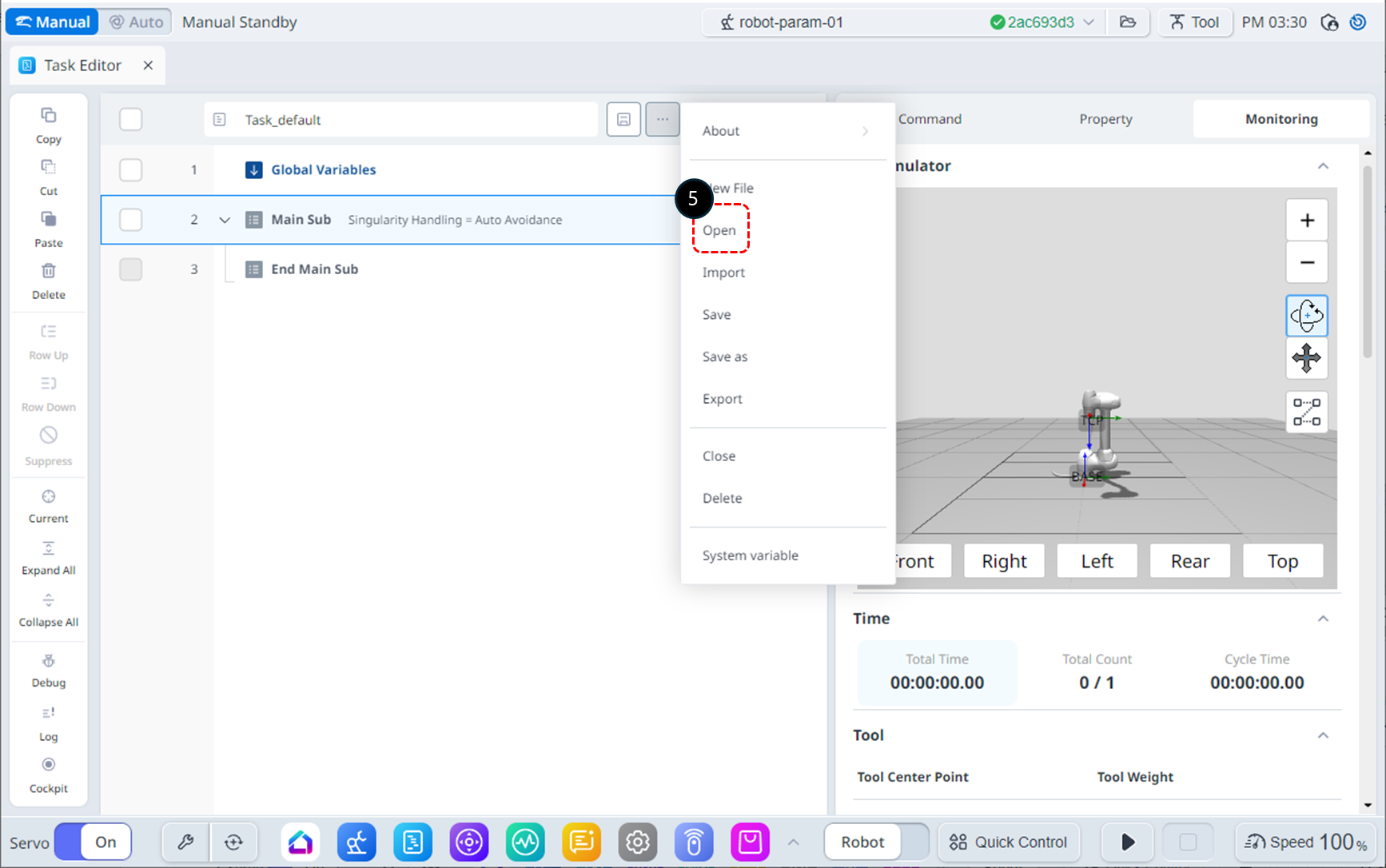
Klik op de knop openen.
-
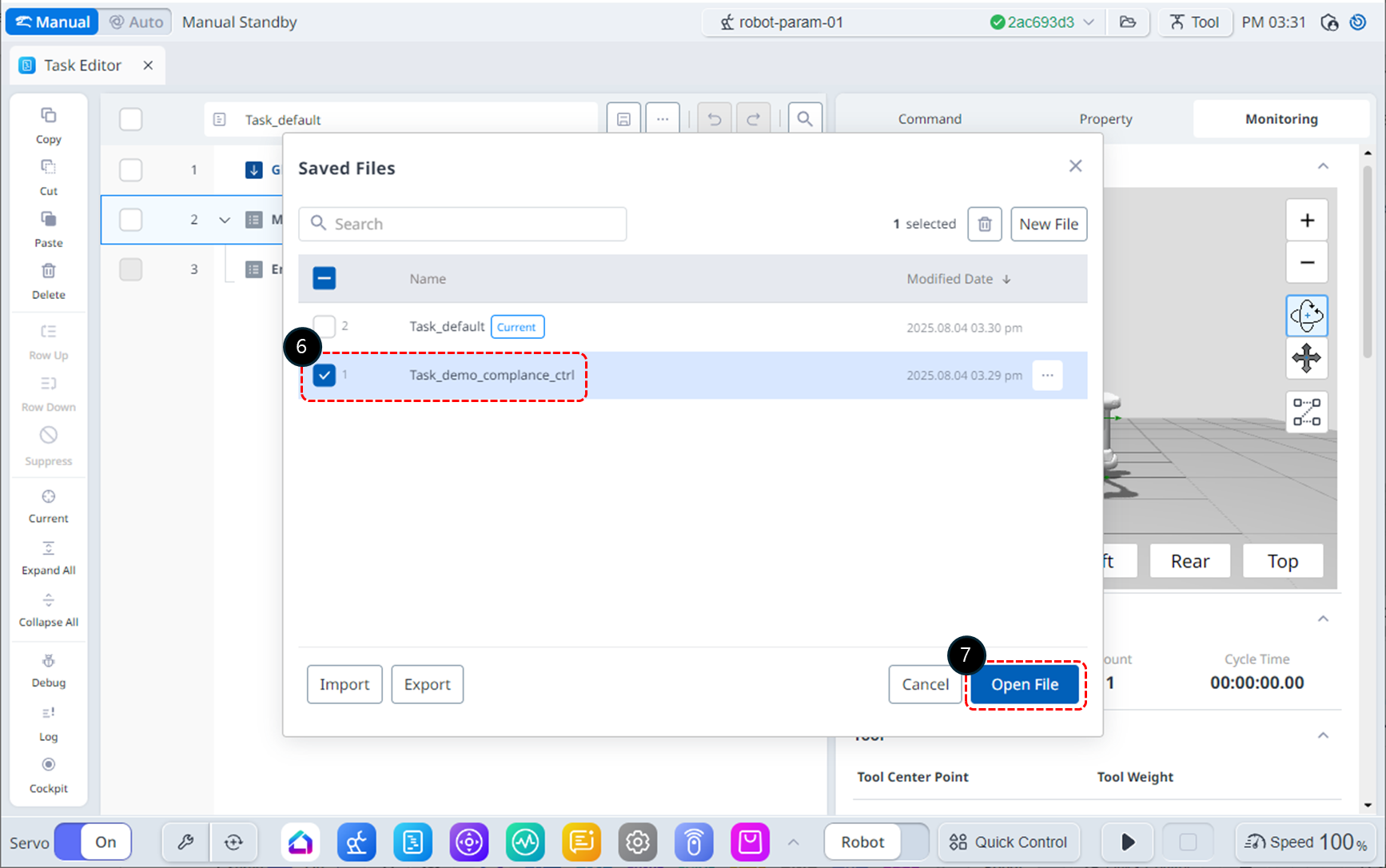
Selecteer het Task_demo_Compliance_ctrl bestand aangemaakt in Try Compliance commando samples.
-
Klik op de knop Bestand openen.
-
Wijzig de naam van het bestand in Task_demo_Force_ctrl.
-
Klik op de knop Opslaan om de bestandsnaam op te slaan.
-
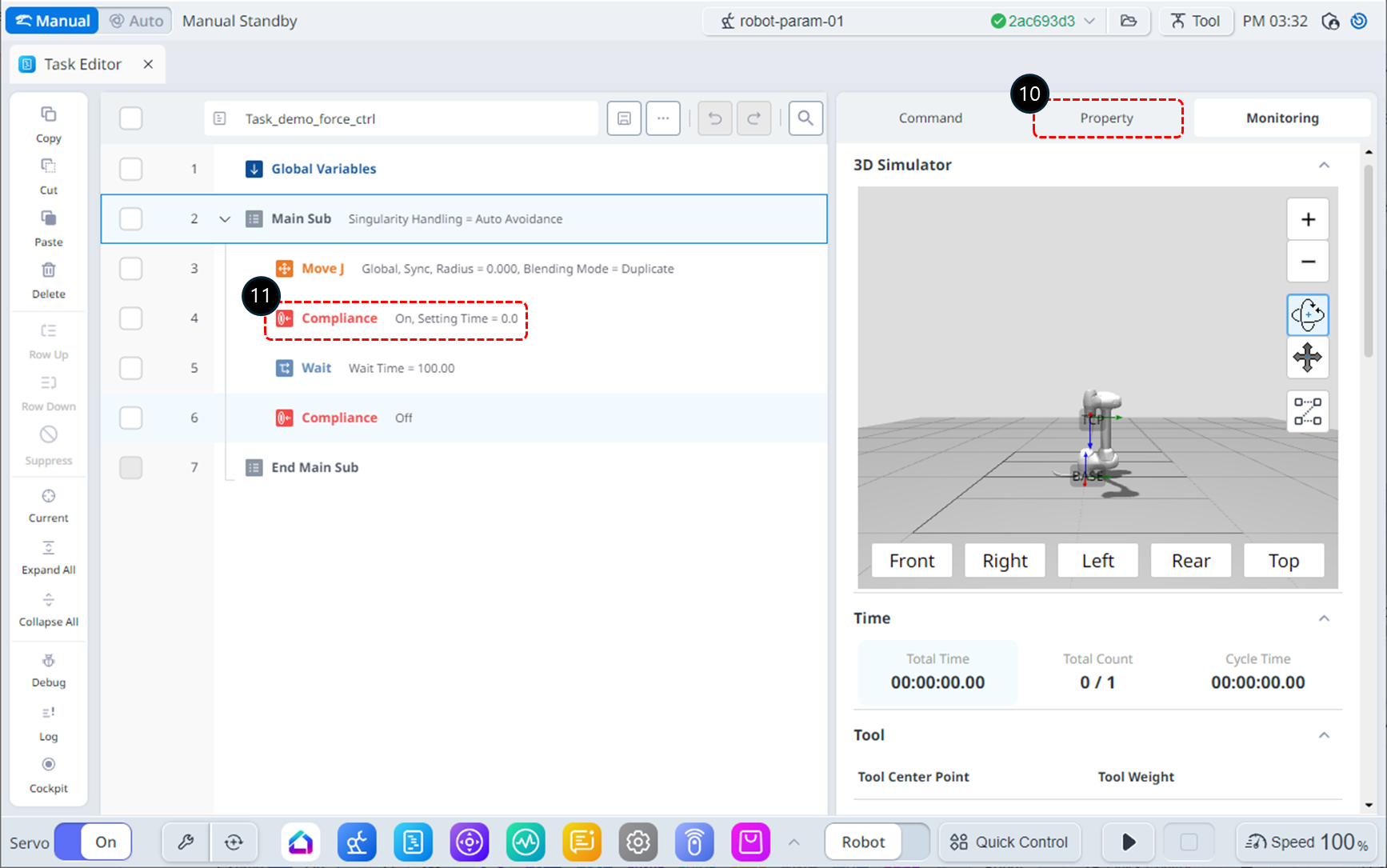
Selecteer het tabblad eigenschap.
-
Kies de opdracht Compliance op de vierde regel.
-
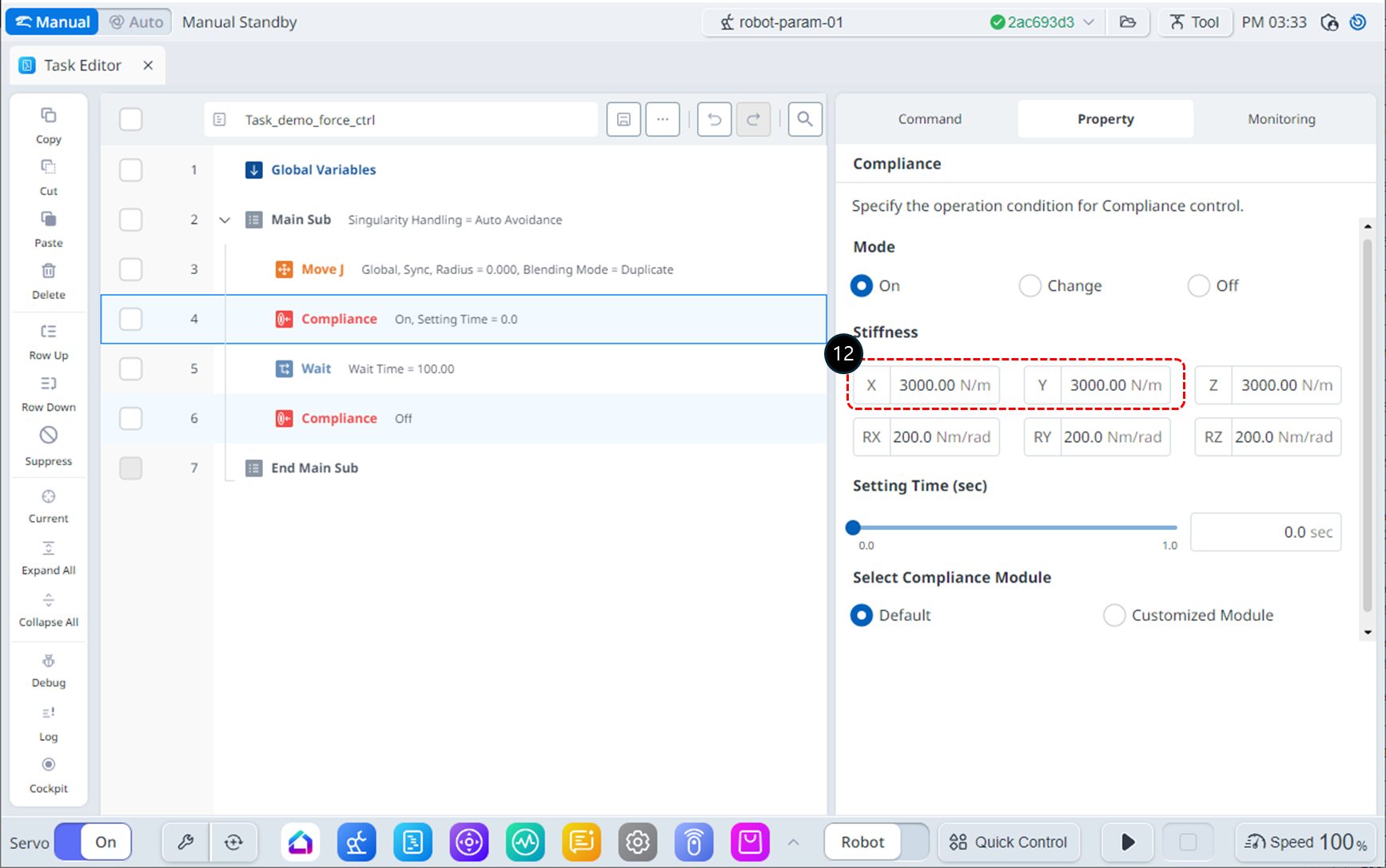
Stel de stijfheid als volgt in op de standaardwaarden.
-
X, Y, Z : 3000 N/m (standaard)
-
RX, Ry, RZ : 200 Nm/rad (standaard)
-
-
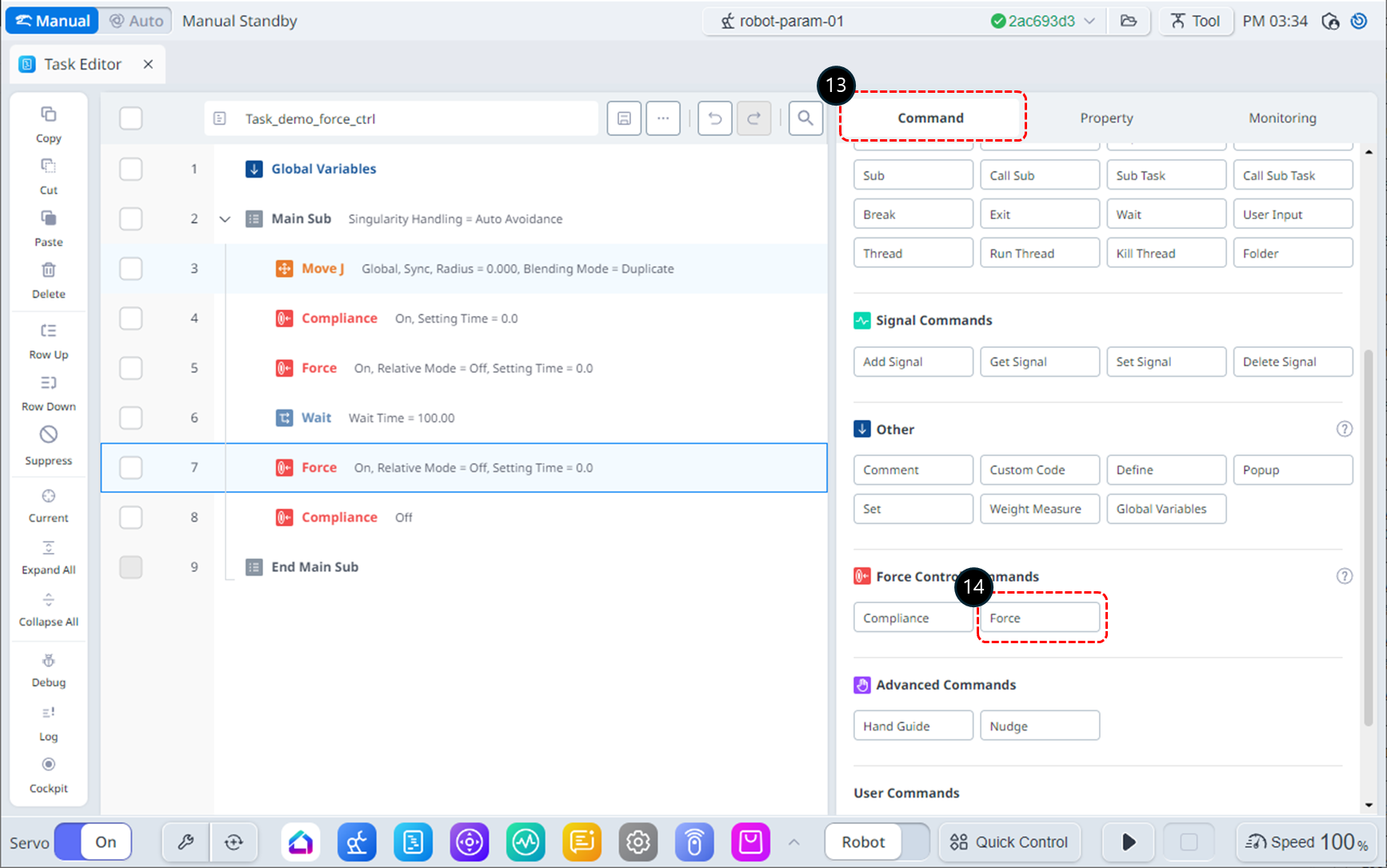
Selecteer het tabblad opdracht.
-
Voeg een Force commando toe aan de 5e en 7e regel. Deze commando's worden gebruikt om Force Control in en uit te schakelen.
-
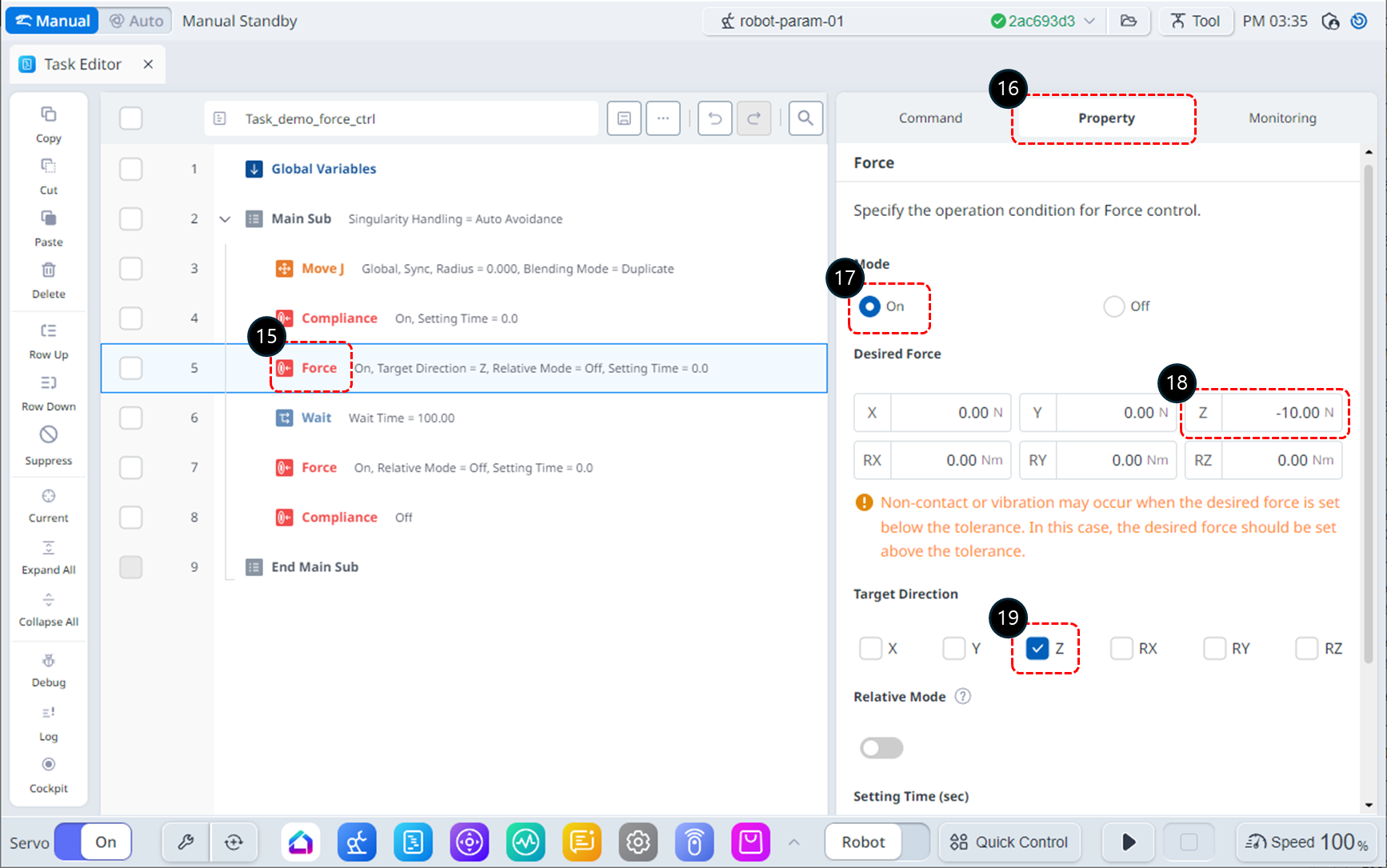
Selecteer de opdracht forceren op de 5e regel.
-
Ga naar het tabblad eigenschap.
-
Stel de modus als volgt in: Modus aan activeert de geforceerde besturing.
-
Modus : Aan
-
-
Stel de gewenste kracht als volgt in.
-
X : 0 N (standaard)
-
Y : 0 N (standaard)
-
Z : -10 N
-
RX, Ry, RZ : 0 Nm/rad (standaard)
-
-
Controleer in de doelrichting alleen de z-as.
-
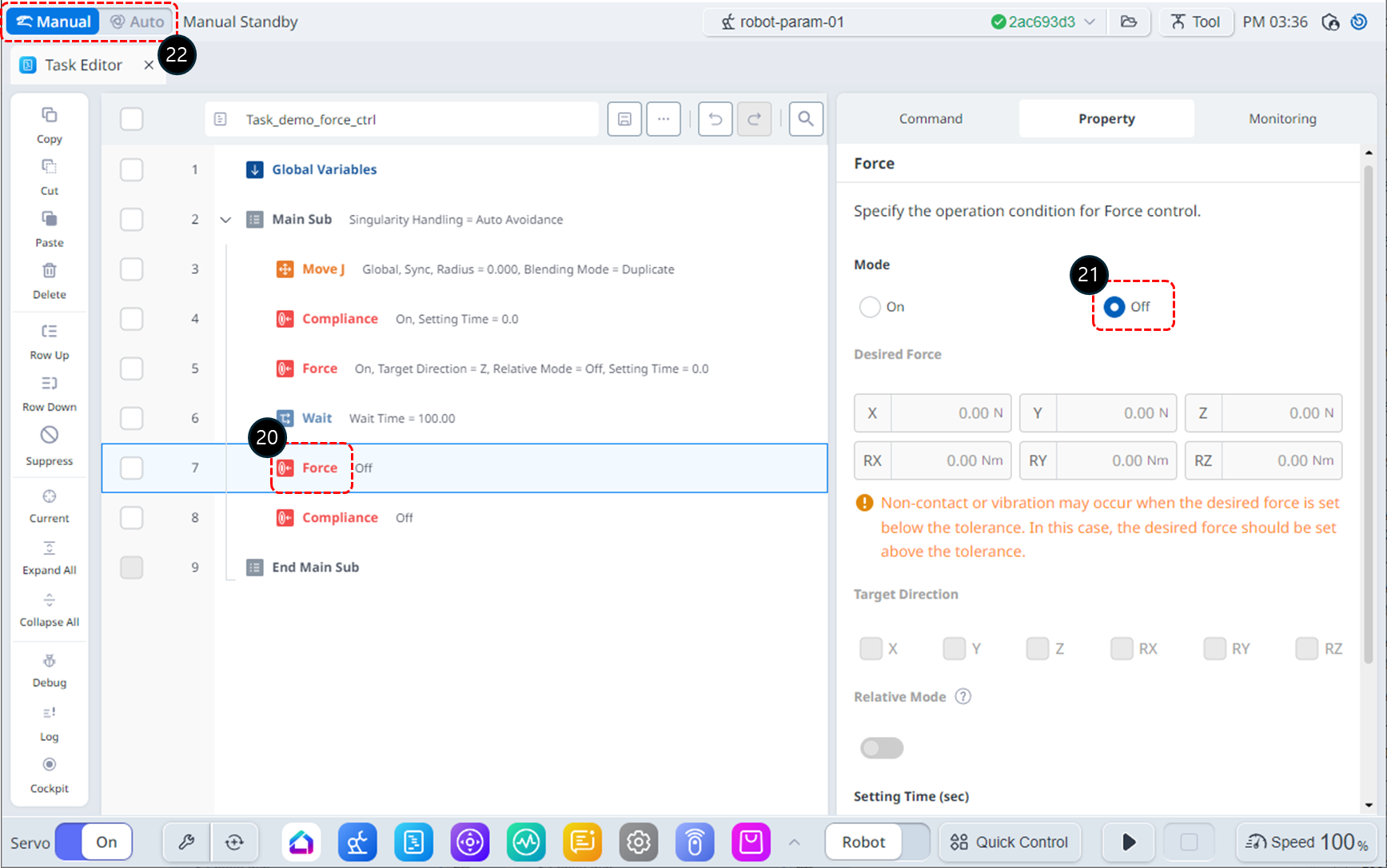
Selecteer in de takenlijst de opdracht forceren op regel 7.
-
Stel de modus als volgt in: Modus uit Hiermee schakelt u de geforceerde bediening uit.
-
Modus : Uit
-
-
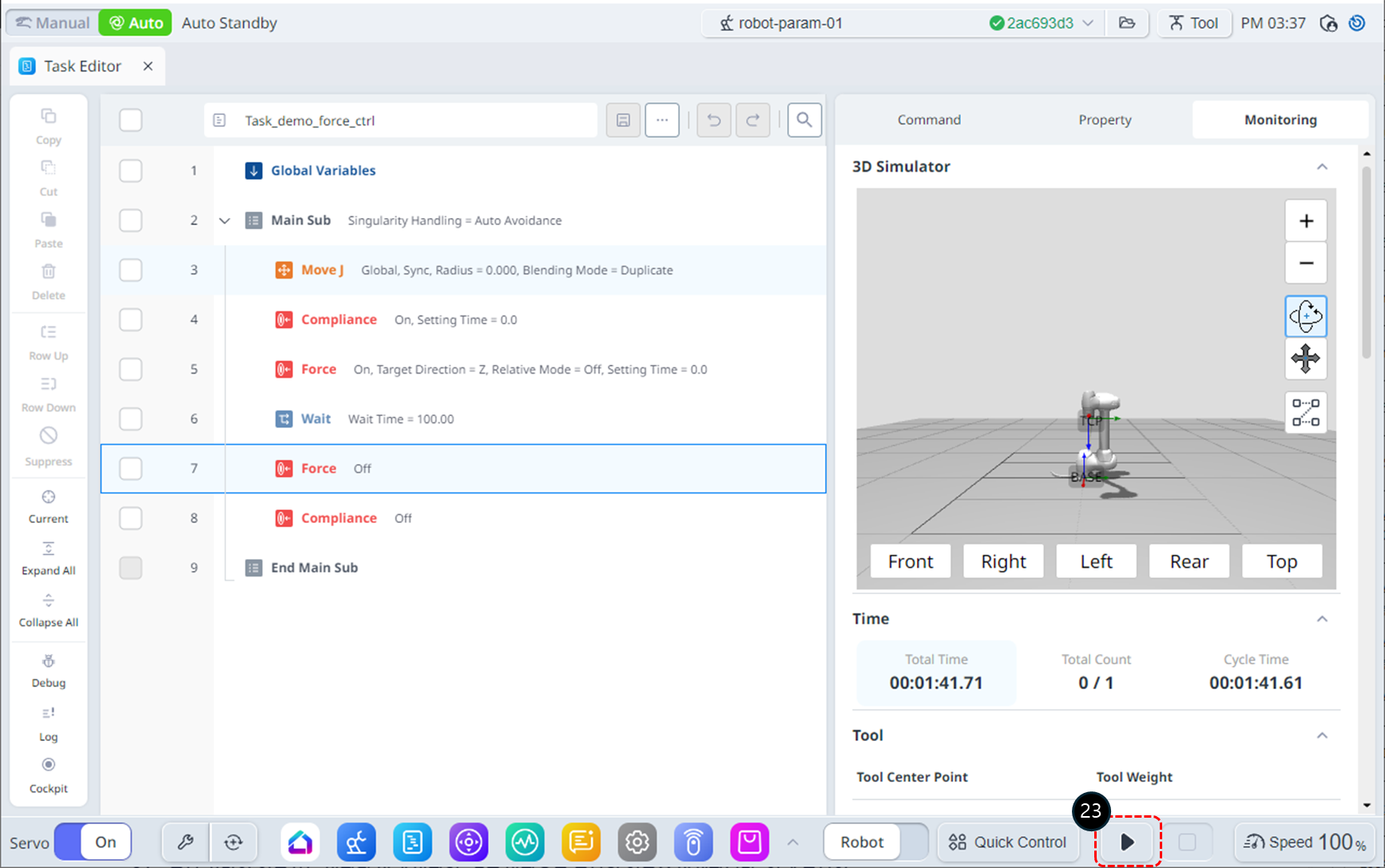
Zet de bedrijfsmodus op auto. Het tabblad eigenschap wordt automatisch overgeschakeld naar het tabblad Monitoring.
Unknown Attachment
-
Klik op de knop uitvoeren. In de wachtstand werkt de robot als volgt:
-
Er wordt een kracht van -10N uitgeoefend op het eindeffect van de robot, waardoor de robot langzaam in de -Z-richting beweegt.
-
Oefen een tegengestelde kracht uit in de +Z-richting, tegengesteld aan de beweging van de robot. Wanneer de door de robot uitgeoefende kracht en de tegengestelde kracht in evenwicht zijn, lijkt de robot zijn positie te houden alsof hij stilstaat.
-
Als er een kracht van meer dan +10N op de robot wordt uitgeoefend, beweegt deze in de richting van de uitgeoefende kracht.
-
-
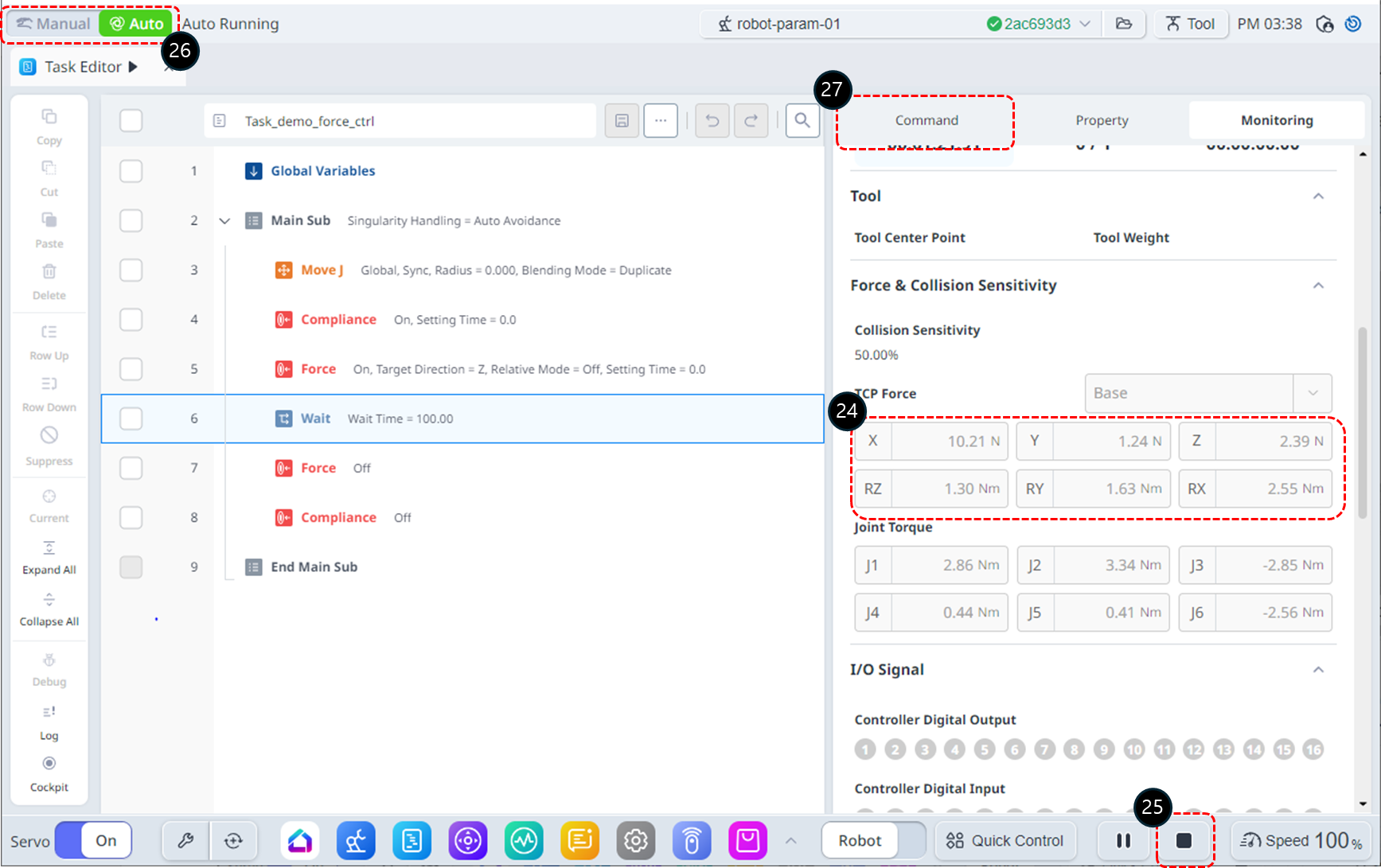
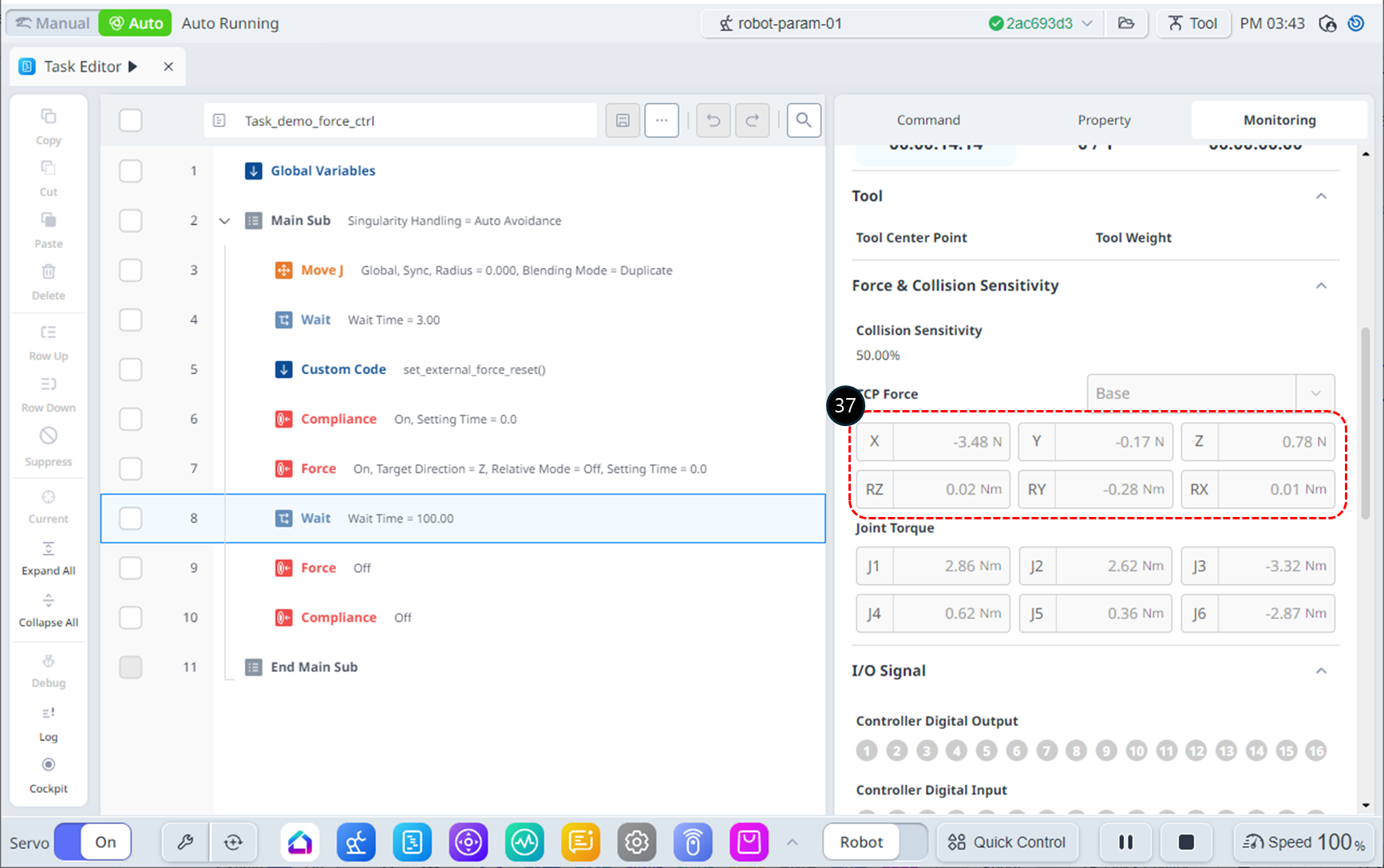
Tijdens de bewerking kunt u de real-time TCP Force controleren in het gedeelte TCP Force van het tabblad Monitoring. Als er geen kracht wordt uitgeoefend op de eindefftor van de robot, moeten de TCP Force-waarden allemaal 0 zijn, maar er kunnen foutcomponenten worden weergegeven. Hieronder vindt u een aanvullende uitleg om dit probleem aan te pakken.
-
Klik op de knop stoppen om de taak te beëindigen.
-
Schakel de bedrijfsmodus naar handmatig voor het wijzigen van de taak.
-
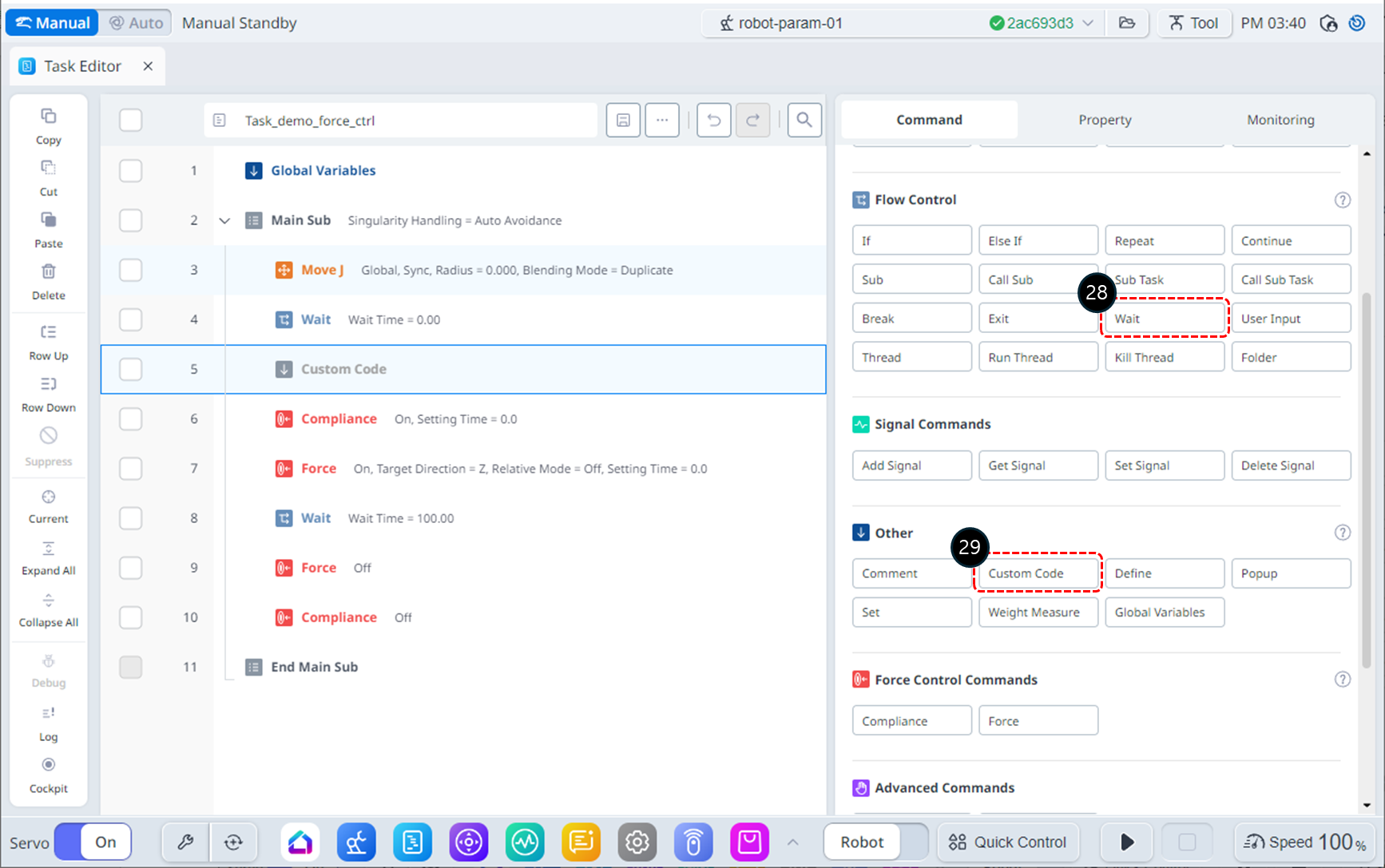
Selecteer het tabblad opdracht.
-
Voeg een wachttijd-opdracht toe aan regel 4 van de takenlijst.
-
Voeg een opdracht aangepaste code toe aan regel 5 van de takenlijst.
-
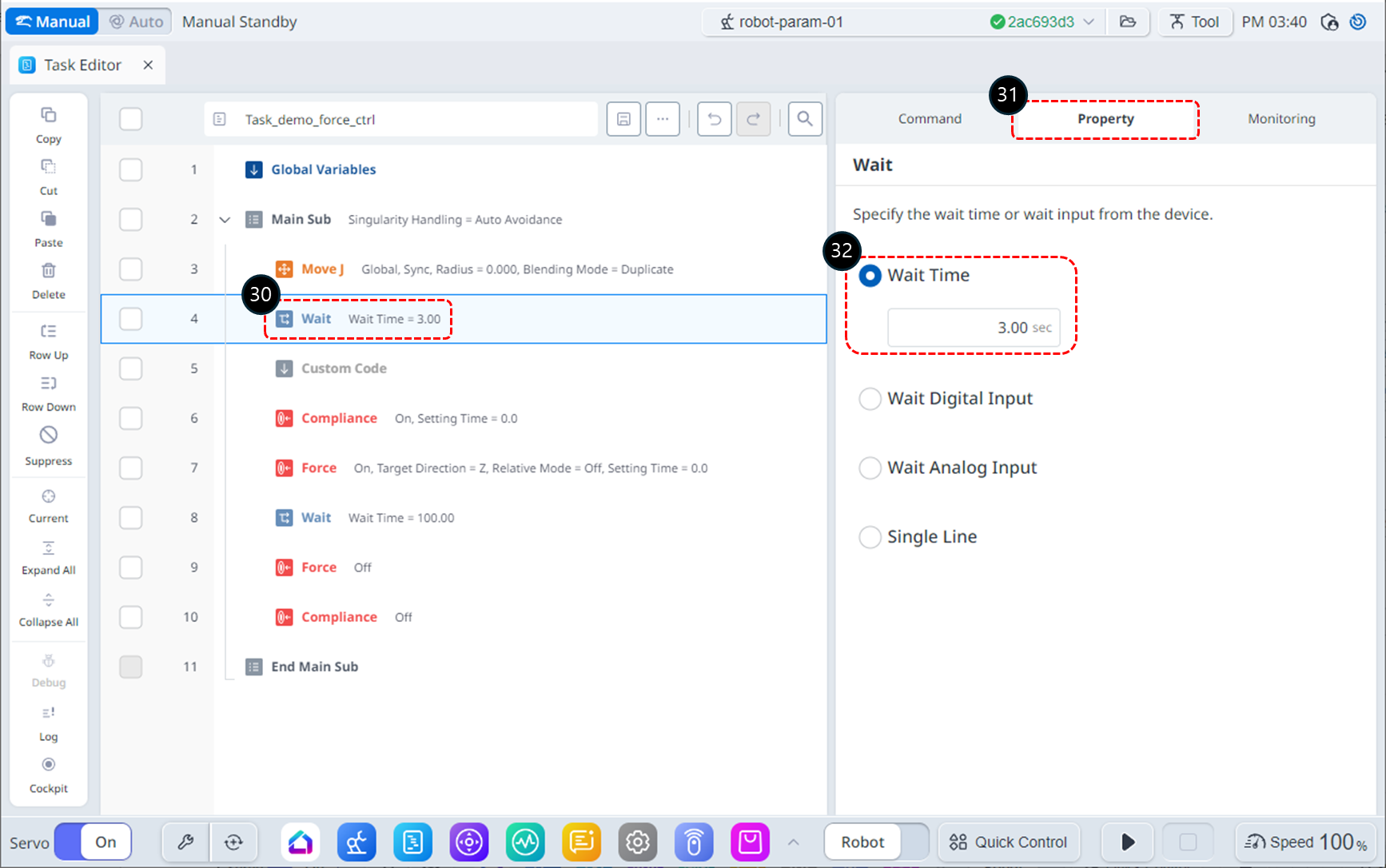
Selecteer de opdracht wachten op regel 4.
-
Selecteer het tabblad eigenschap.
-
Stel de wachttijd als volgt in.
-
Wachttijd : 3 sec
-
-
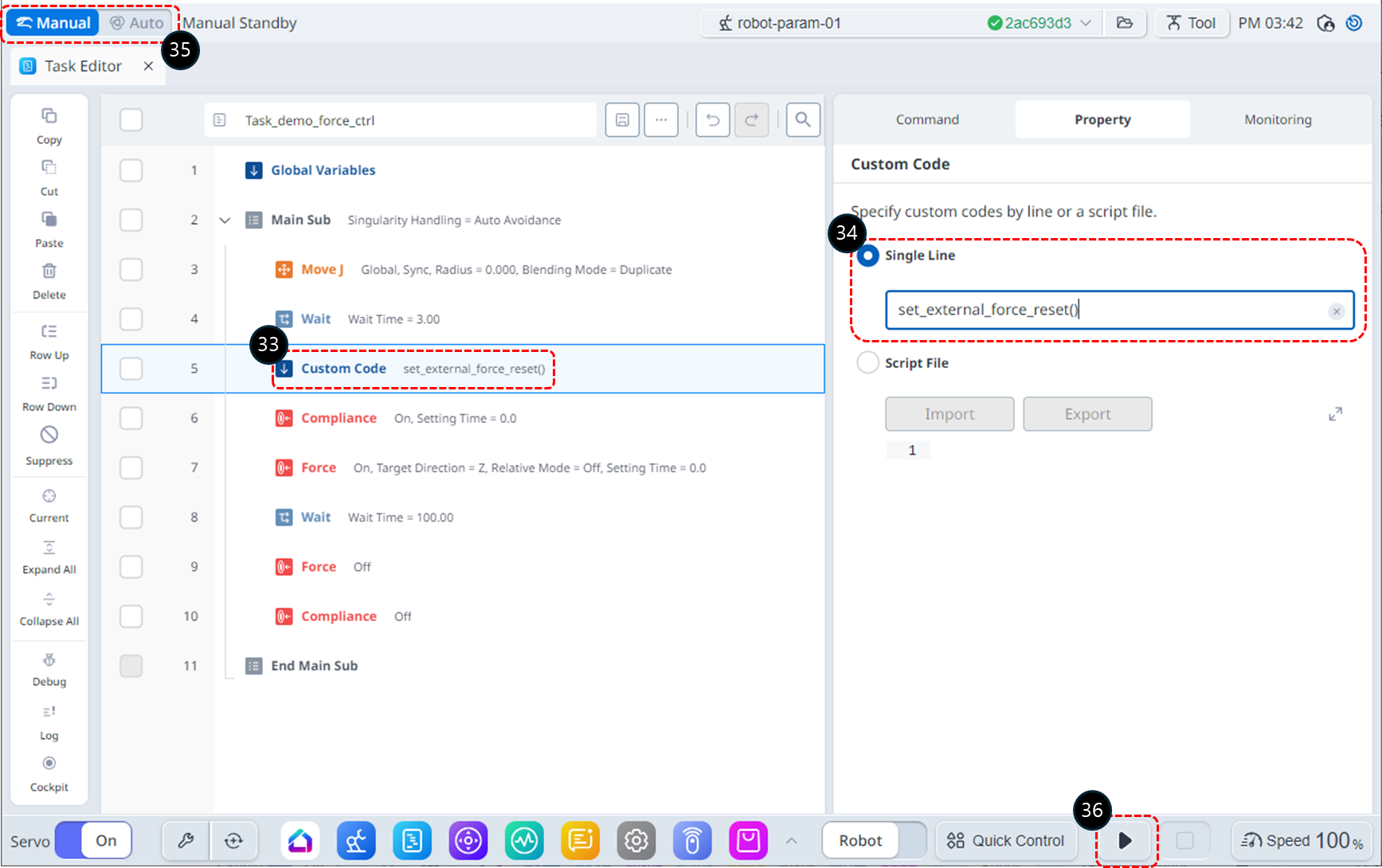
Selecteer de opdracht aangepaste code op regel 5.
-
Kies enkele regel en voeg de volgende DRL-opdracht toe: Met deze opdracht worden de waarden van de externe krachtsensor gereset om eventuele fouten te verwijderen.
-
set_externl_force_reset()
-
-
Zet de bedrijfsmodus op auto. Het tabblad eigenschap wordt automatisch overgeschakeld naar het tabblad Monitoring.
-
Klik op de knop uitvoeren.
-
Controleer op het tabblad Monitoring de TCP Force-waarden. U zult merken dat de fout is verminderd vergeleken met voordat u het commando set_external_force_reset() gebruikt.