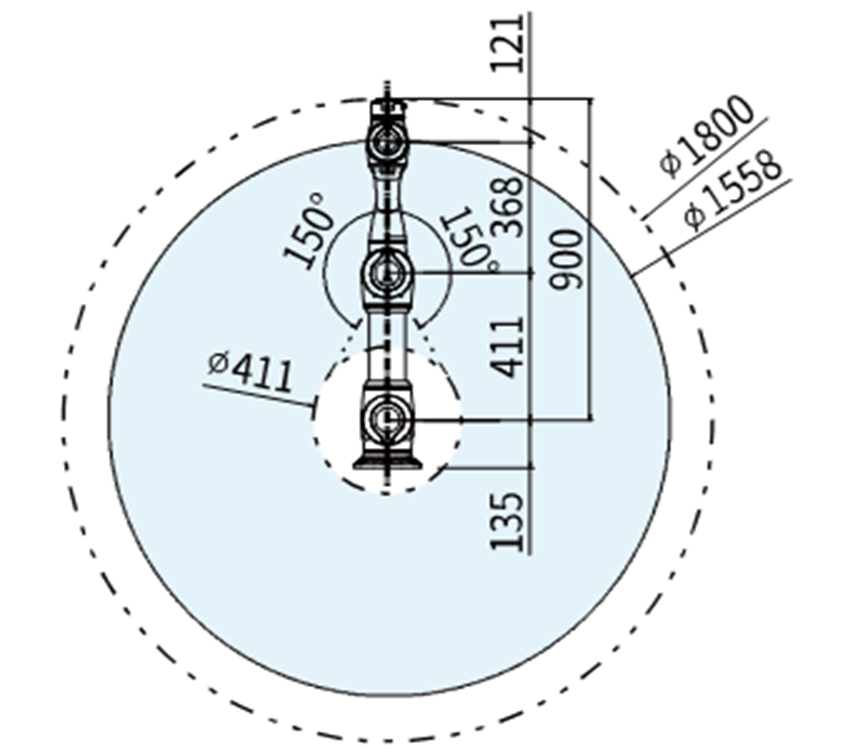
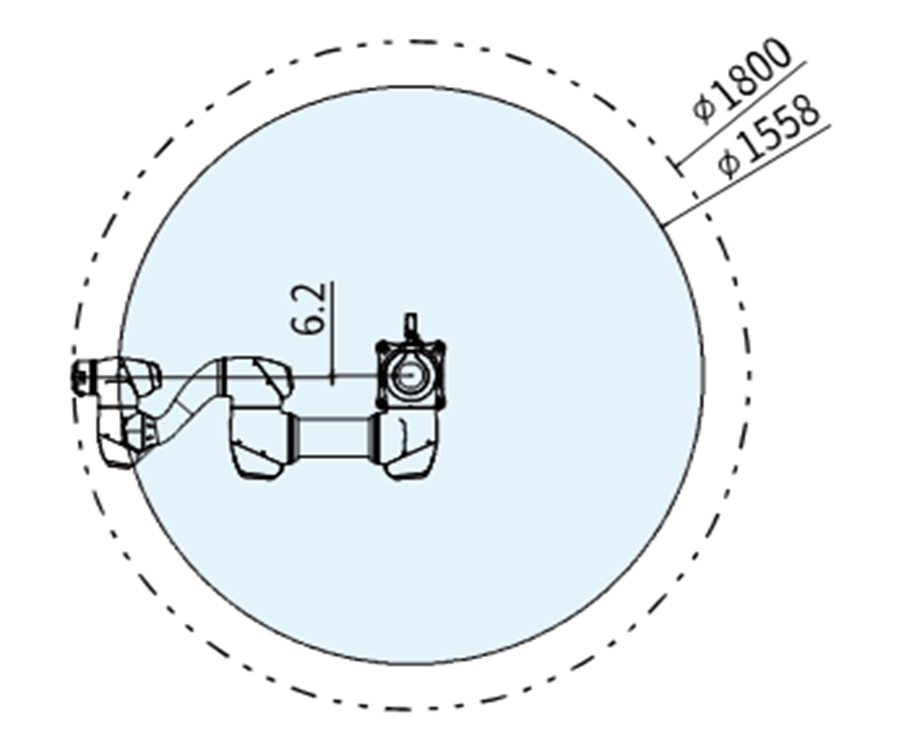
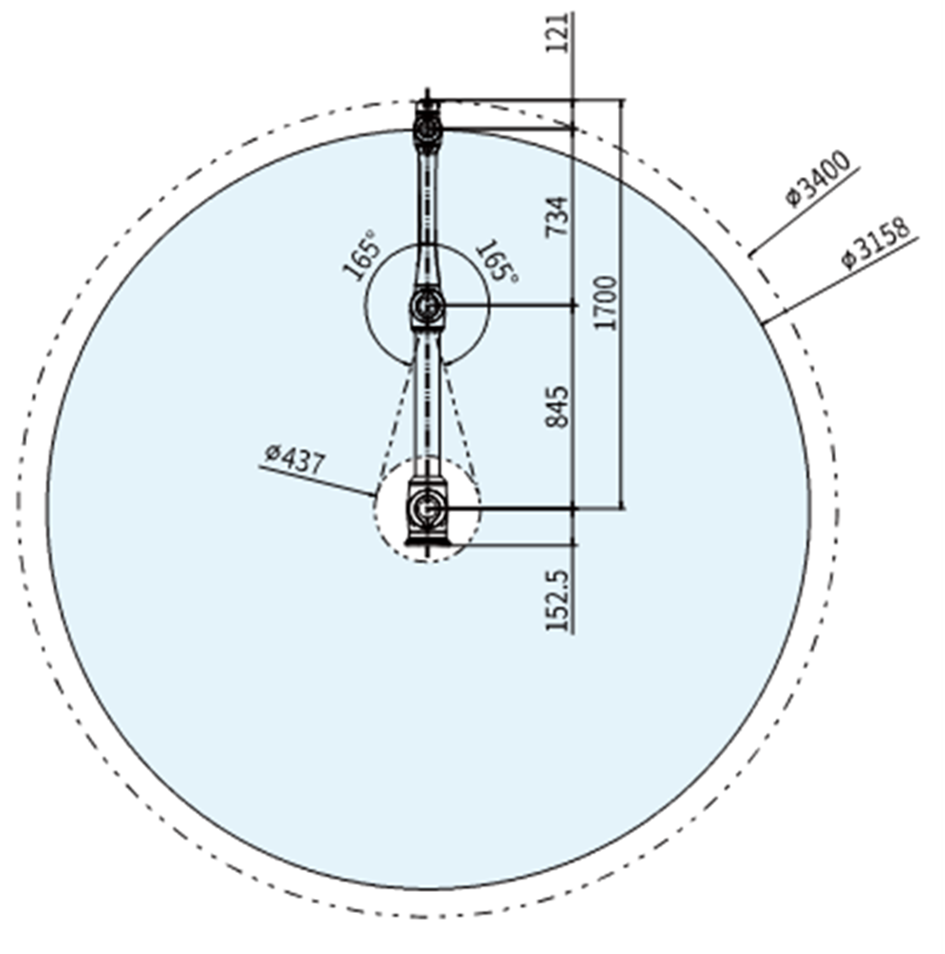
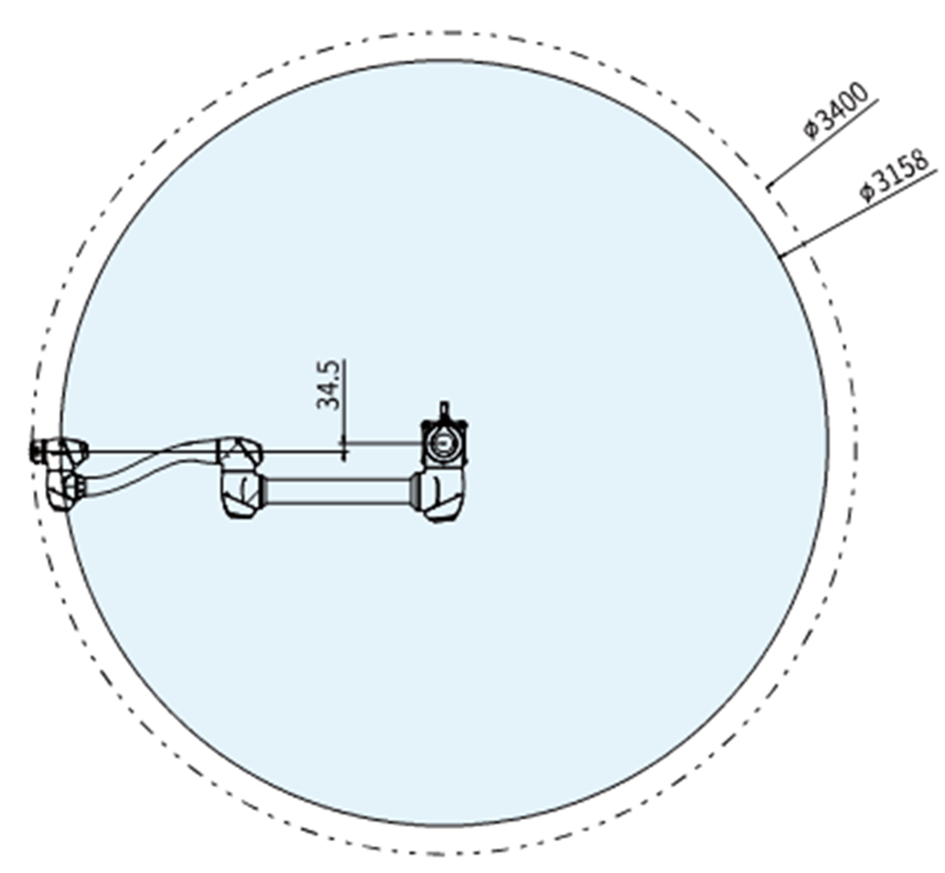
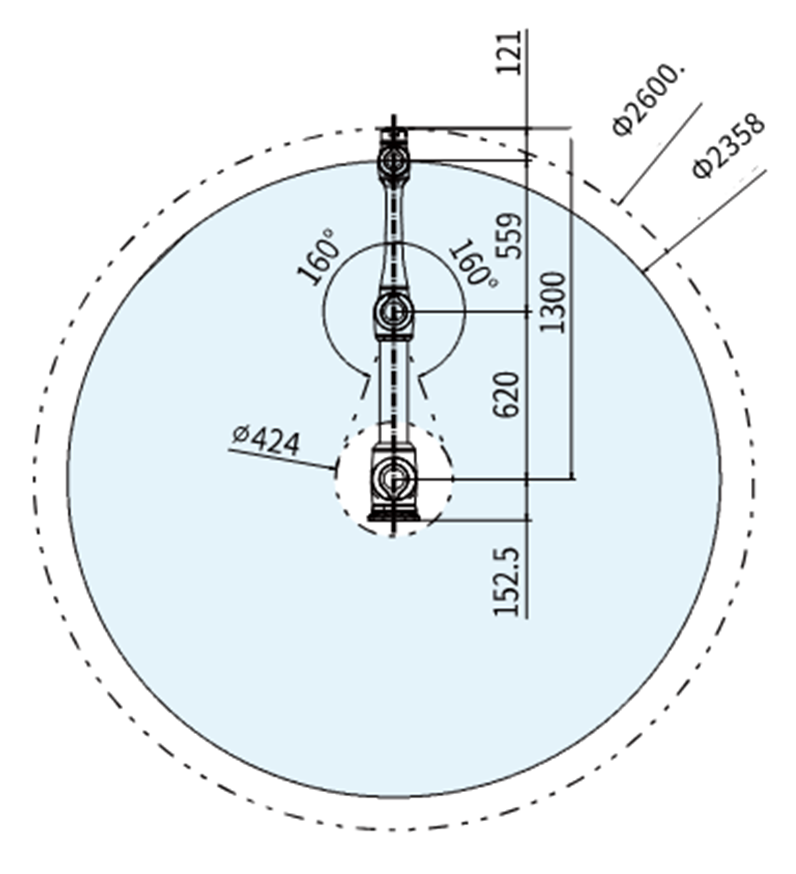
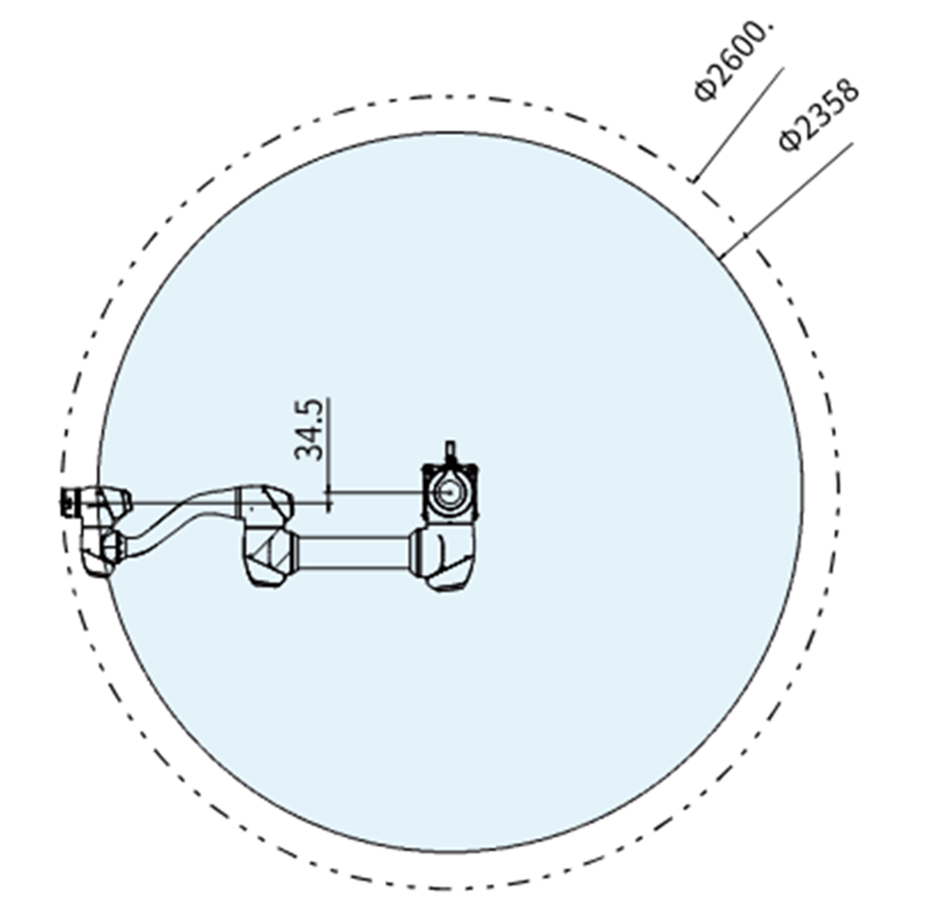
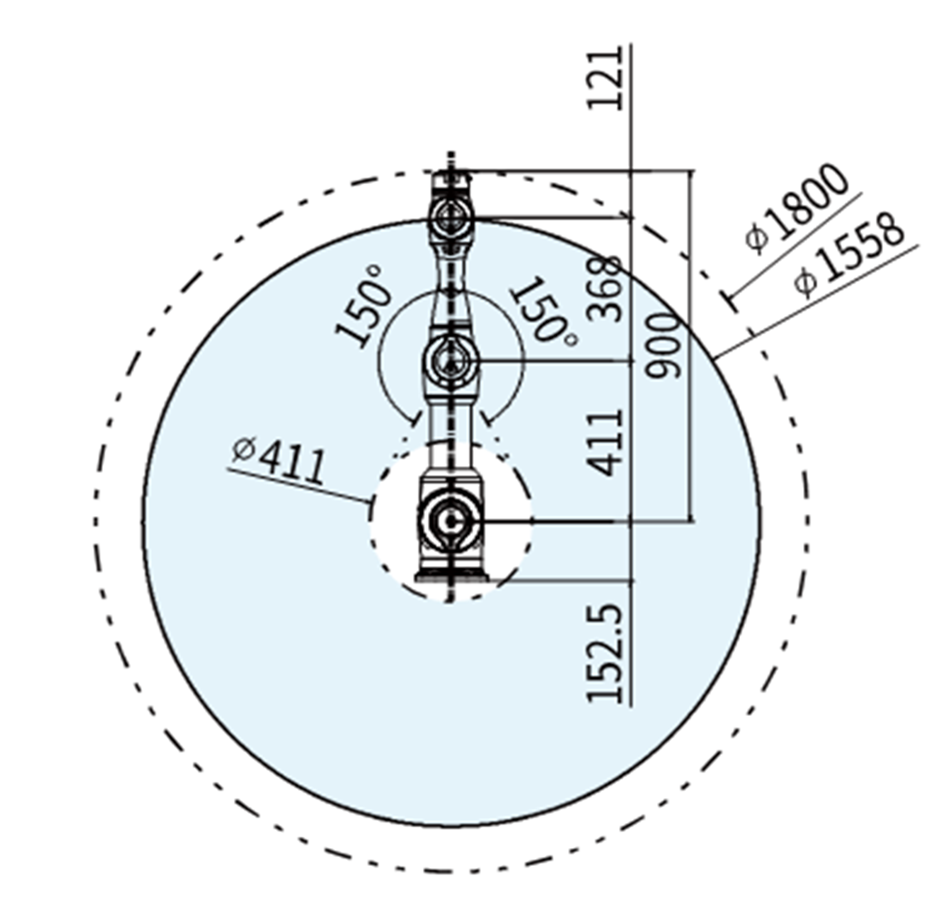
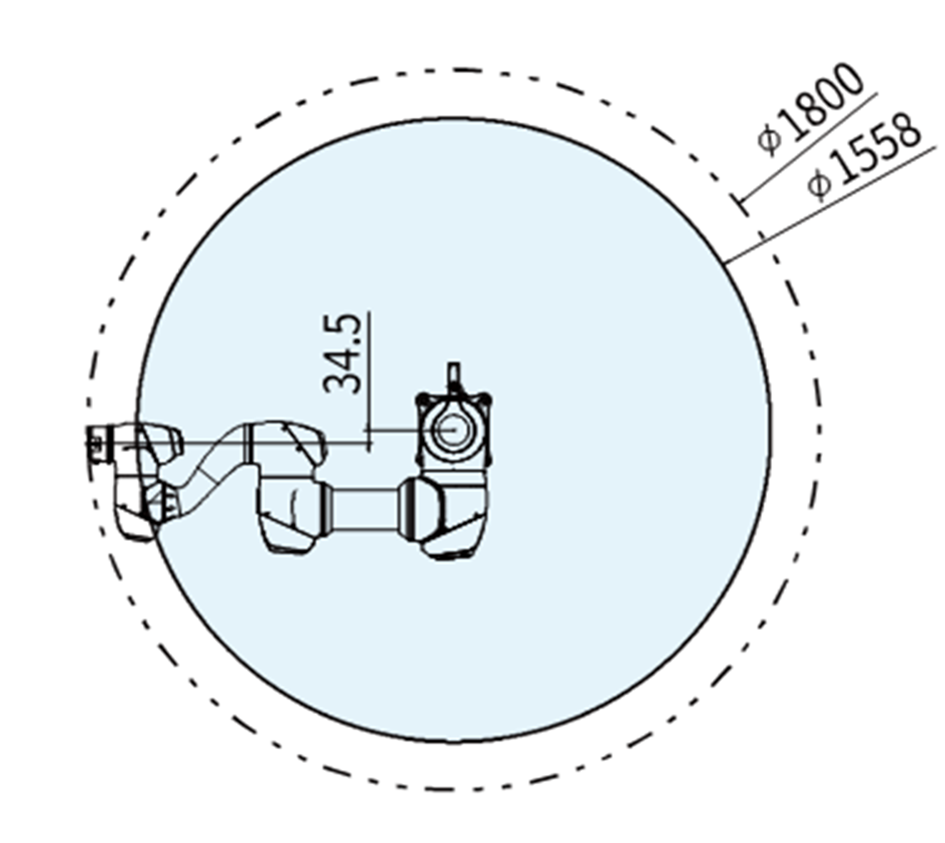
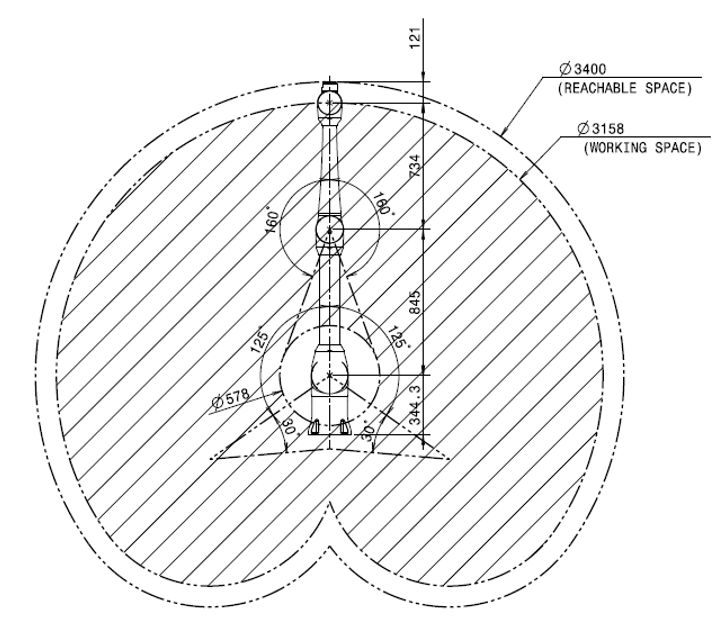
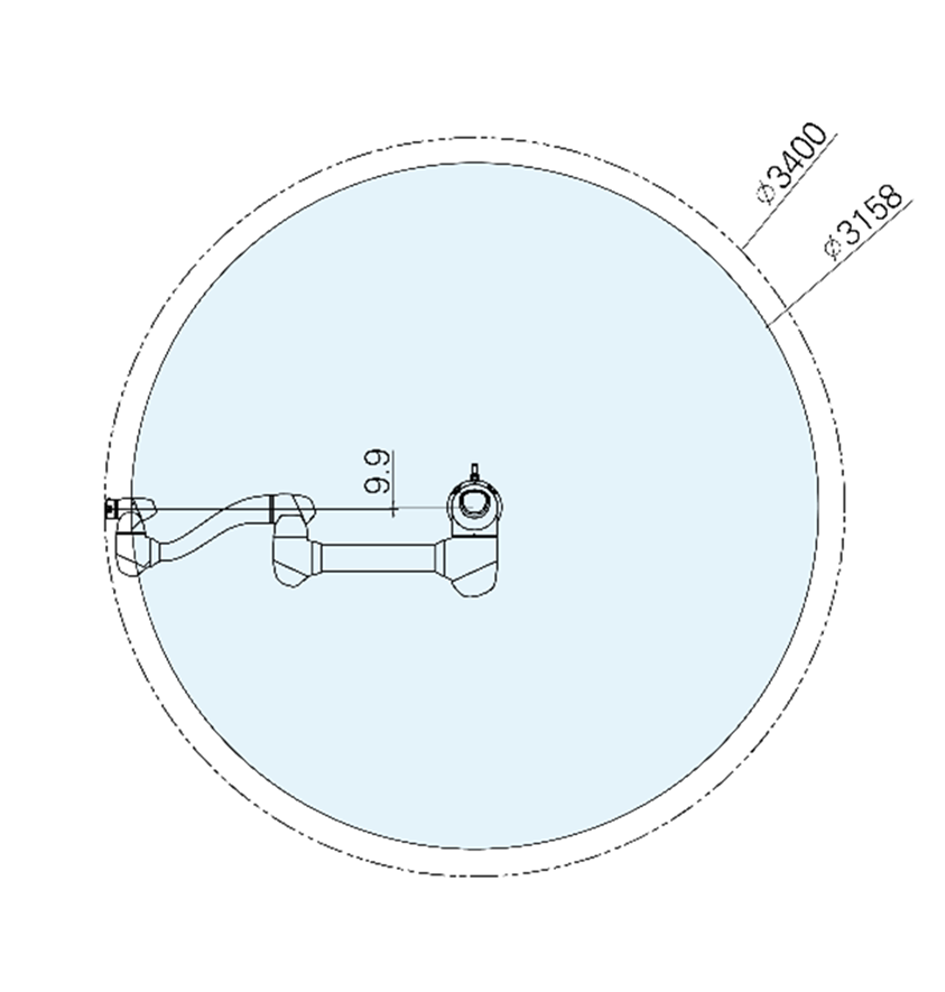
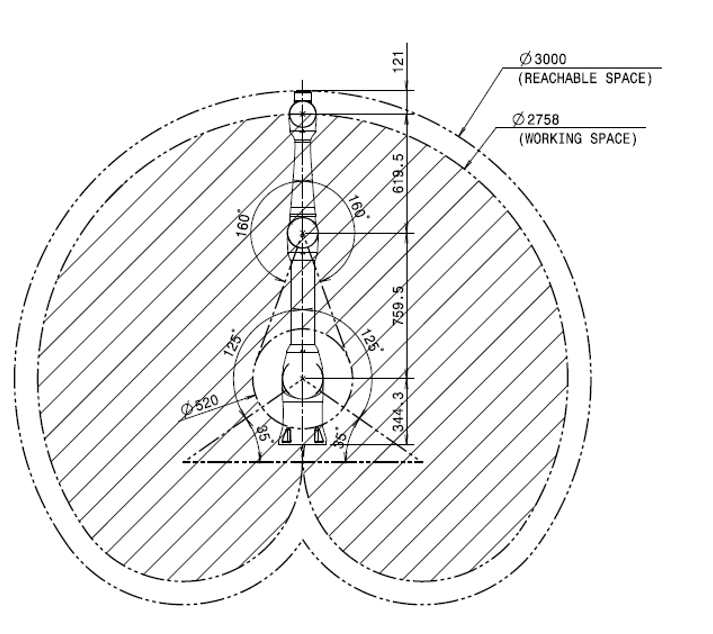
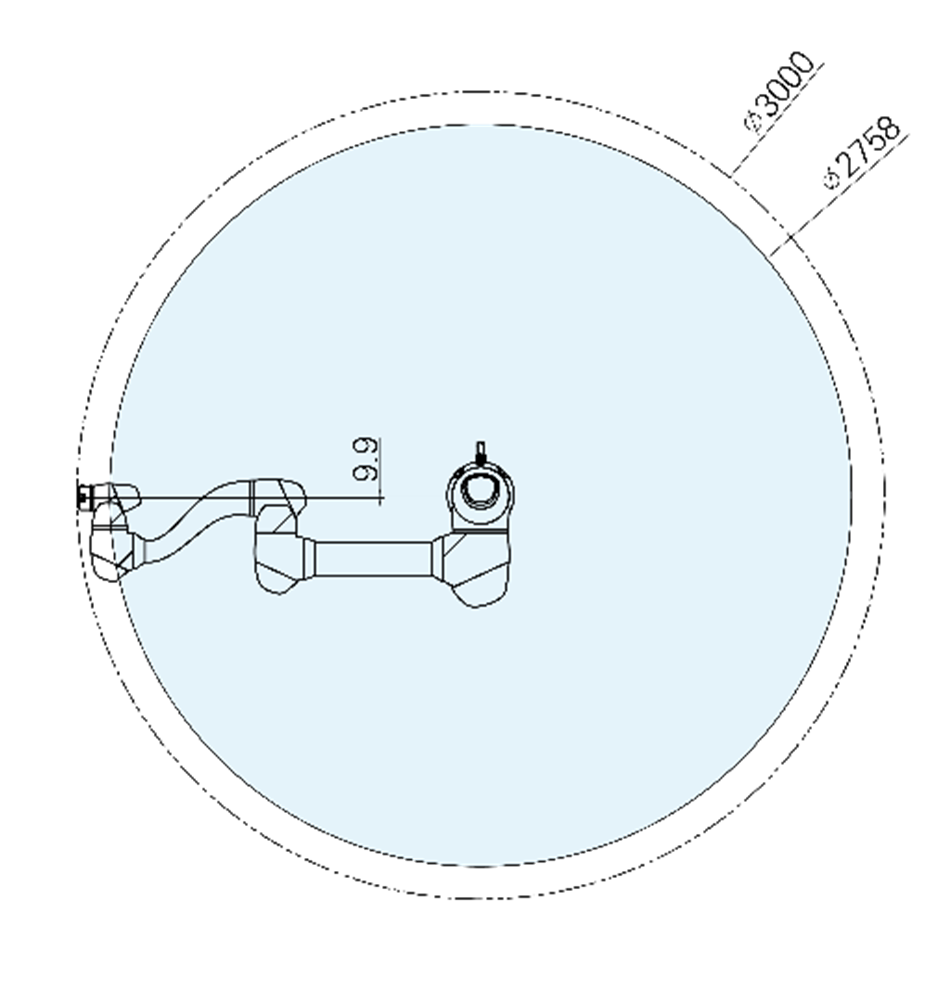
Robot működési terület
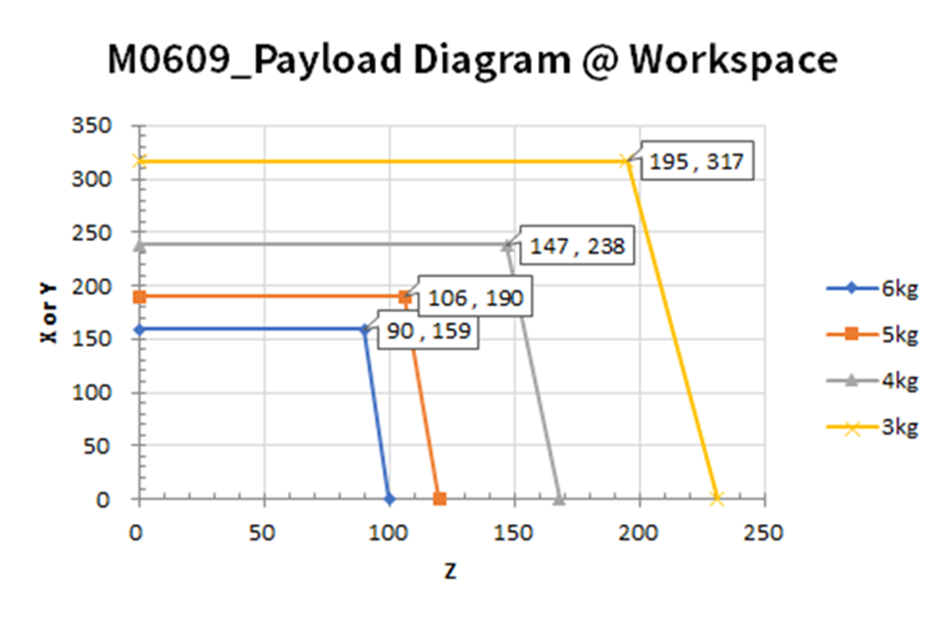
M0609
|
|
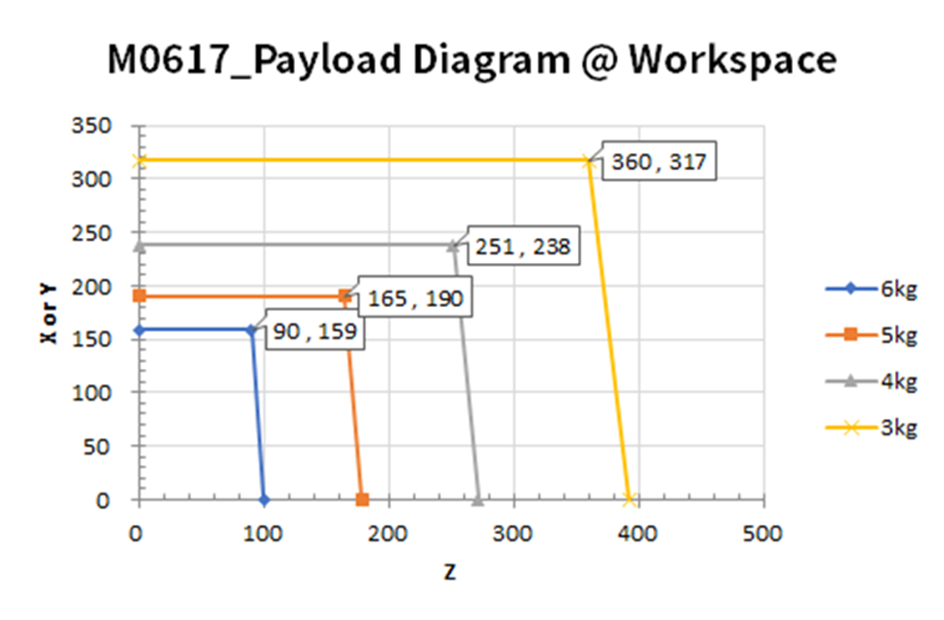
M0617
|
|
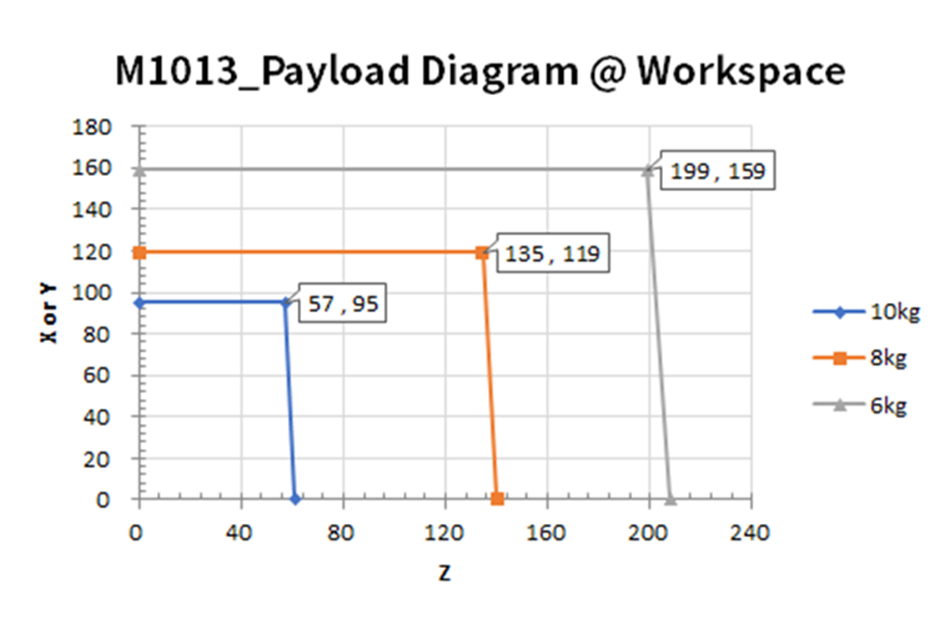
M1013
|
|
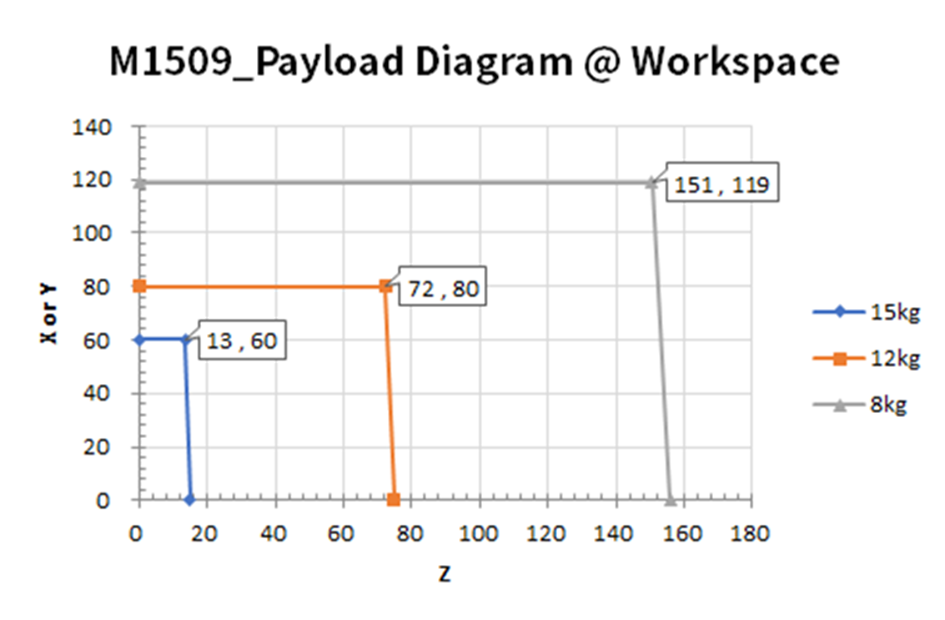
M1509
|
|
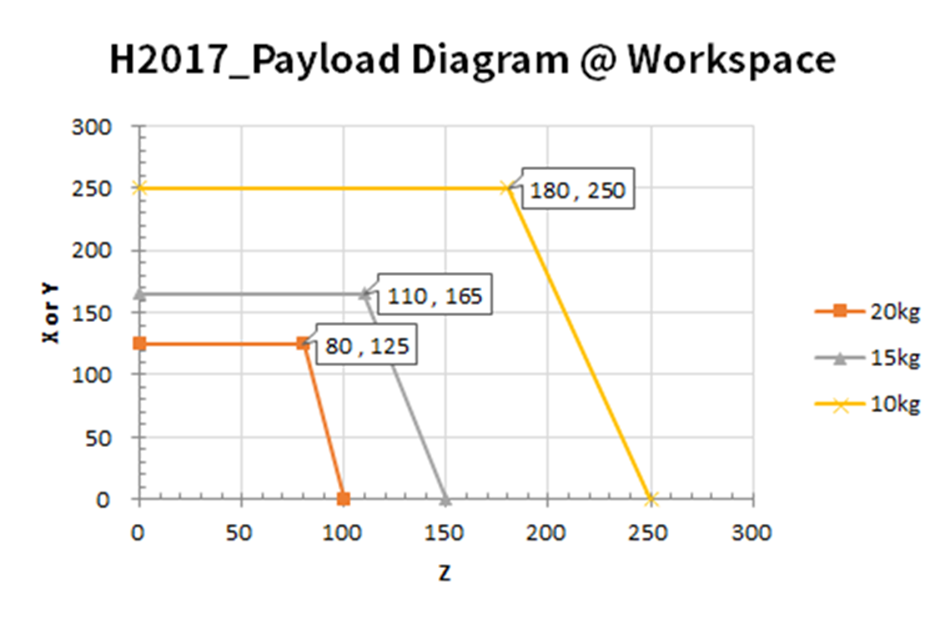
H2017
|
|
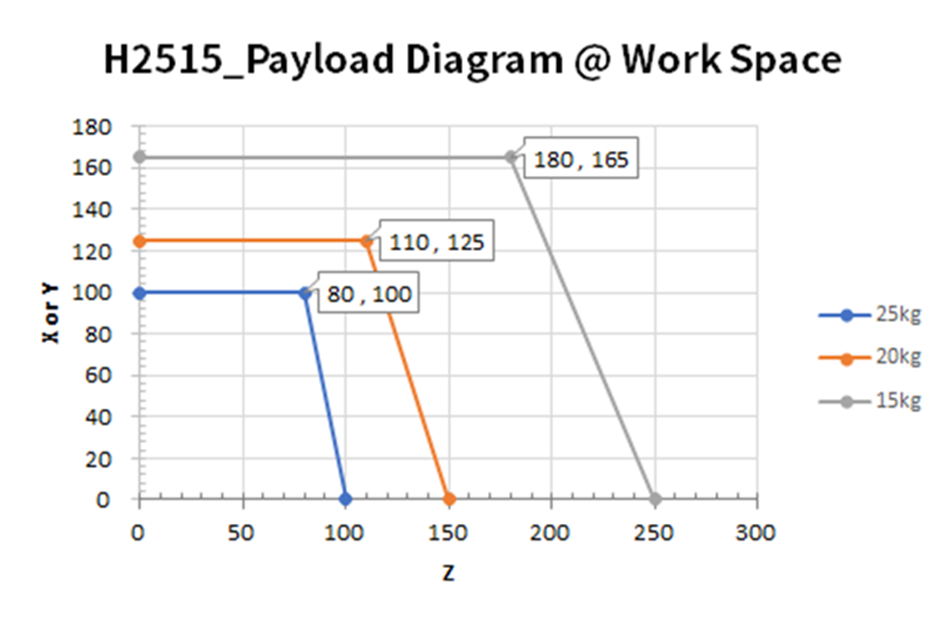
H2515
|
|
Max. Hasznos teher a működési területen belül
A robot maximális hasznos terhelése a munkaterületen belül a súlyponttól való távolságnak megfelelően változik. Az egy távolságra jutó hasznos teher a következő:
Megjegyzés
Ez a terhelési diagram egy kis szerszámterhelés térfogatát feltételezi. A nagyobb térfogatú szerszámoknak nagyobb a terhelhetőségük a szerszám súlypontja felett, mint az azonos súlyú, de kisebb térfogatú szerszámoknak, és ilyen esetekben rezgés fordulhat elő.
M0609
|
M0609
|
M1013
|
M1509
|
H2017
|
H2515
|
Megengedett pillanat és tehetetlenség
A robot J4-J6 gépének megengedett sebessége és tehetetlensége a következő:
|
Modell neve |
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
Engedélyezett pillanat |
Tehetetlenség |
Engedélyezett pillanat |
Tehetetlenség |
Engedélyezett pillanat |
Tehetetlenség |
|
|
M0609 |
36 Nm |
1,6 kg㎡ |
36 Nm |
1,6 kg㎡ |
36 Nm |
1,6 kg㎡ |
|
M0617 |
||||||
|
M1013 |
||||||
|
M1509 |
||||||
|
H2017 |
145 Nm |
8,0 kg㎡ |
81 Nm |
4,5 kg㎡ |
36 Nm |
2,0 kg㎡ |
|
H2515 |
||||||
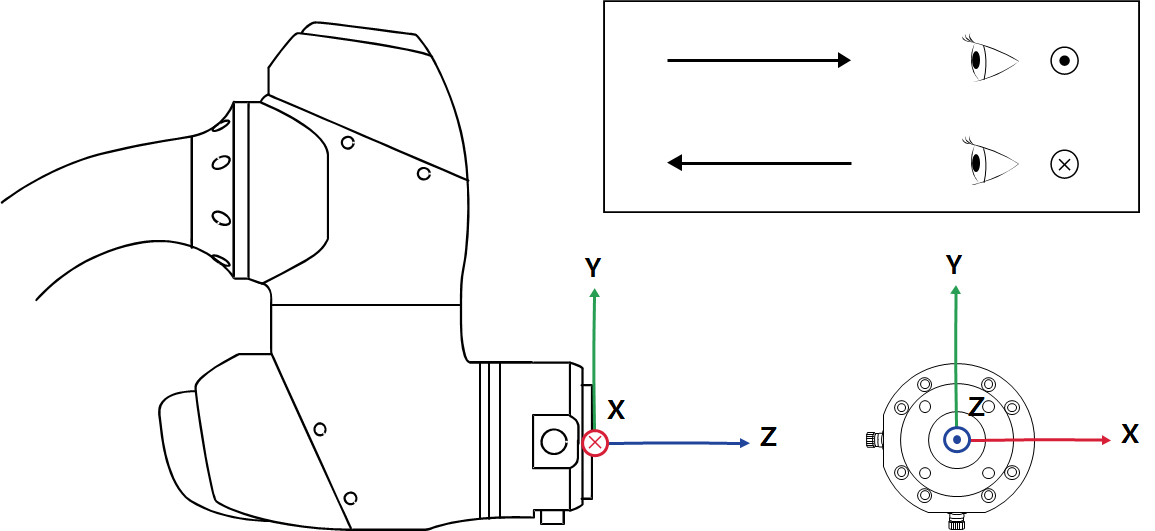
Eszközközpont (TCP)
A TCP-t lásd az alábbi ábrán.
Alapvető műszaki adatok
|
Modell neve |
M0609 |
M0617 |
M1013 |
M1509 |
H2017 |
H2515 |
|
|---|---|---|---|---|---|---|---|
|
Súly |
27 kg |
34 kg |
33 kg |
32 kg |
79 kg |
77 kg |
|
|
Hasznos teher a munkaterületen belül |
6 kg |
6 kg |
10 kg |
15 kg |
20 kg |
25 kg |
|
|
Max. Munka sugara |
900 mm |
1700 mm |
1300 mm |
900 mm |
1700 mm |
1500 mm |
|
|
Tengelyek száma |
6 |
||||||
|
Max. TCP sebesség |
1 m/s felett |
||||||
|
Pozíció ismételhetősége (ISO 9283) |
±0,03 mm |
±0,1 mm |
±0,05 mm |
±0,03 mm |
±0,1 mm |
||
|
Védelmi besorolás |
IP 54 |
||||||
|
Zaj |
< 65 dB |
||||||
|
Telepítési irány |
Bármilyen orientáció |
Csak a padlón |
|||||
|
Irányító és tanári medál |
Doosan Controller & Teach Pendant |
||||||
|
Rezgés és gyorsulás |
10≤f<57㎐ - 0,075 mm amplitúdó 57≤f≤150㎐ – 1G |
||||||
|
Hatás |
Maximális amplitúdó: 50㎨(5G)
|
||||||
|
Üzemi hőmérséklet |
0 ℃ (273K – 318K) |
||||||
|
Tárolási hőmérséklet |
-5 ℃ (268K – 323K) |
||||||
|
Páratartalom |
20% ~ 80% |
||||||
Axis Specifikációk
|
Modell neve |
M0609 |
M0617 |
M1013 |
M1509 |
H2017 |
H2515 |
|---|---|---|---|---|---|---|
|
Működési szög |
||||||
|
J1 |
±360㎐) |
±360㎐) |
±360㎨) |
±360㎳) |
±360℃) |
±360℃) |
|
J2 |
±360℃) |
±360℃) |
±360°) |
±360°) |
±125°) |
±125°) |
|
J3 |
±150°) |
±165°) |
±160°) |
±150°) |
±160°) |
±160°) |
|
J4 |
±360°) |
±360°) |
±360°) |
±360°) |
±360°) |
±360°) |
|
J5 |
±360°) |
±360°) |
±360°) |
±360°) |
±360°) |
±360°) |
|
J6 |
±360°) |
±360°) |
±360°) |
±360°) |
±360°) |
±360°) |
|
Max. Sebesség tengelyenként (névleges hasznos teher művelet) |
||||||
|
J1 |
150 °/s |
100 °/s |
120 °/s |
150 °/s |
100 °/s |
100 °/s |
|
J2 |
150 °/s |
100 °/s |
120 °/s |
150 °/s |
80 °/s |
80 °/s |
|
J3 |
180 °/s |
150 °/s |
180 °/s |
180 °/s |
100 °/s |
100 °/s |
|
J4 |
225 °/s |
225 °/s |
225 °/s |
225 °/s |
180 °/s |
180 °/s |
|
J5 |
225 °/s |
225 °/s |
225 °/s |
225 °/s |
180 °/s |
180 °/s |
|
J6 |
225 °/s |
225 °/s |
225 °/s |
225 °/s |
180 °/s |
180 °/s |