A robot végoldali peremes fedelén két M8-es, 8-érintkezős csatlakozó található, és az alábbi ábrán látható a hely és az alak.
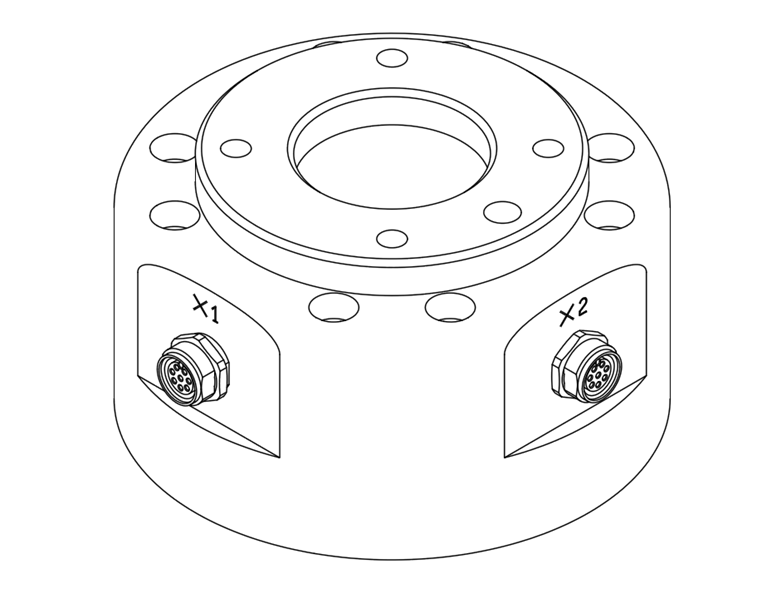
A csatlakozó tápellátást és vezérlési jeleket biztosít a megfogó vagy az egyes robotszerszámokba ágyazott érzékelők működtetéséhez. Az alábbiak az ipari kábelek mintái (egyenértékű kábelek használhatók):
-
Phoenix CONTACT 1404178, apa (egyenes)
-
Phoenix CONTACT 1404182, apa (derékszögű)
Sematikus diagram
Az egyes csatlakozók tűs térképe a következő:
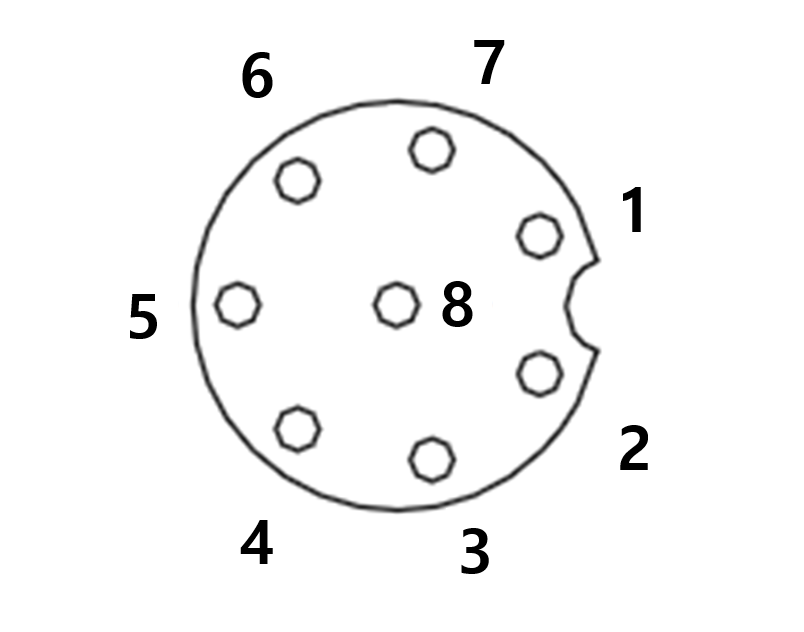
Az X1 és X2 csatlakozón keresztül biztosított I/O funkciók eltérnek egymástól, és az I/O részletes beállításait az alábbi táblázatban találja.
X1 beállítás
|
Nem |
Jeltípus |
Leírás |
|---|---|---|
|
1 |
Digitális bemenet 1 |
PNP (forrás típusa, alapértelmezett) |
|
2 |
Digitális kimenet 1 |
Állítsa PNP (Forrás típusa, alapértelmezett) vagy NPN (Mosogató típusa) értékre |
|
3 |
Digitális kimenet 2 |
Állítsa PNP (Forrás típusa, alapértelmezett) vagy NPN (Mosogató típusa) értékre |
|
4 |
Analóg bemenet 1 / RS-485 + |
Állítsa a feszültség (0-10V) vagy az áram (4-20mA, alapértelmezett) / értékre |
|
5 |
Tápellátás |
Állítsa a belső tápegységet +24V (alapértelmezett), +12V vagy 0V értékre |
|
6 |
Analóg bemenet 2 / RS-485 - |
Állítsa a feszültség (0-10V) vagy az áram (4-20mA, alapértelmezett) / értékre |
|
7 |
Digitális bemenet 2 |
PNP (forrás típusa, alapértelmezett) |
|
8 |
GND |
|
X2 beállítás
|
Nem |
Jeltípus |
Leírás |
|---|---|---|
|
1 |
Digitális bemenet 3 |
PNP (forrás típusa, alapértelmezett) |
|
2 |
Digitális kimenet 3 |
Állítsa PNP (Forrás típusa, alapértelmezett) vagy NPN (Mosogató típusa) értékre |
|
3 |
Digitális kimenet 4 |
Állítsa PNP (Forrás típusa, alapértelmezett) vagy NPN (Mosogató típusa) értékre |
|
4 |
Analóg bemenet 3 / RS-485 + |
Állítsa a feszültség (0-10V) vagy az áramerősség (4-20mA, alapértelmezett) / Max 1M átviteli sebességet |
|
5 |
Tápellátás |
Állítsa a belső tápegységet +24V (alapértelmezett), +12V vagy 0V értékre |
|
6 |
Analóg bemenet 4 / RS-485 - |
Állítsa a feszültség (0-10V) vagy az áramerősség (4-20mA, alapértelmezett) / Max 1M átviteli sebességet |
|
7 |
Digitális bemenet 4 |
PNP (forrás típusa, alapértelmezett) |
|
8 |
GND |
|
A peremes bemenet/kimenet (I/O) kezdeti teljesítménye 24 V-ra van állítva, és 0 V-ra vagy 12 V-ra állítható.
Az I/O-csatlakozás során a tápellátásra vonatkozó részletes előírásokat lásd az alábbi táblázatban.
|
Paraméter |
Min |
Típus |
Max |
Egység |
|---|---|---|---|---|
|
Tápfeszültség (12 V mód) |
11,4 |
12 |
12,6 |
V |
|
Tápfeszültség (24 V mód) |
22,8 |
24 |
25,2 |
V |
|
Tápáram |
- |
- |
3 |
A |
Figyelmeztetés
-
Állítsa be a szerszámot és a fogót úgy, hogy ne okozzon veszélyt, ha a pt áramkimaradás esetén bármilyen veszélyt okoz.
(pl. a szerszámból leeső munkadarab) -
Az egyes csatlakozók 5. Sz. érintkezője mindig 24 V-ot ad ki, miközben a robot tápellátást kap, ezért a szerszám és a szorító beállításakor ügyeljen arra, hogy a robot tápellátását elvágja.
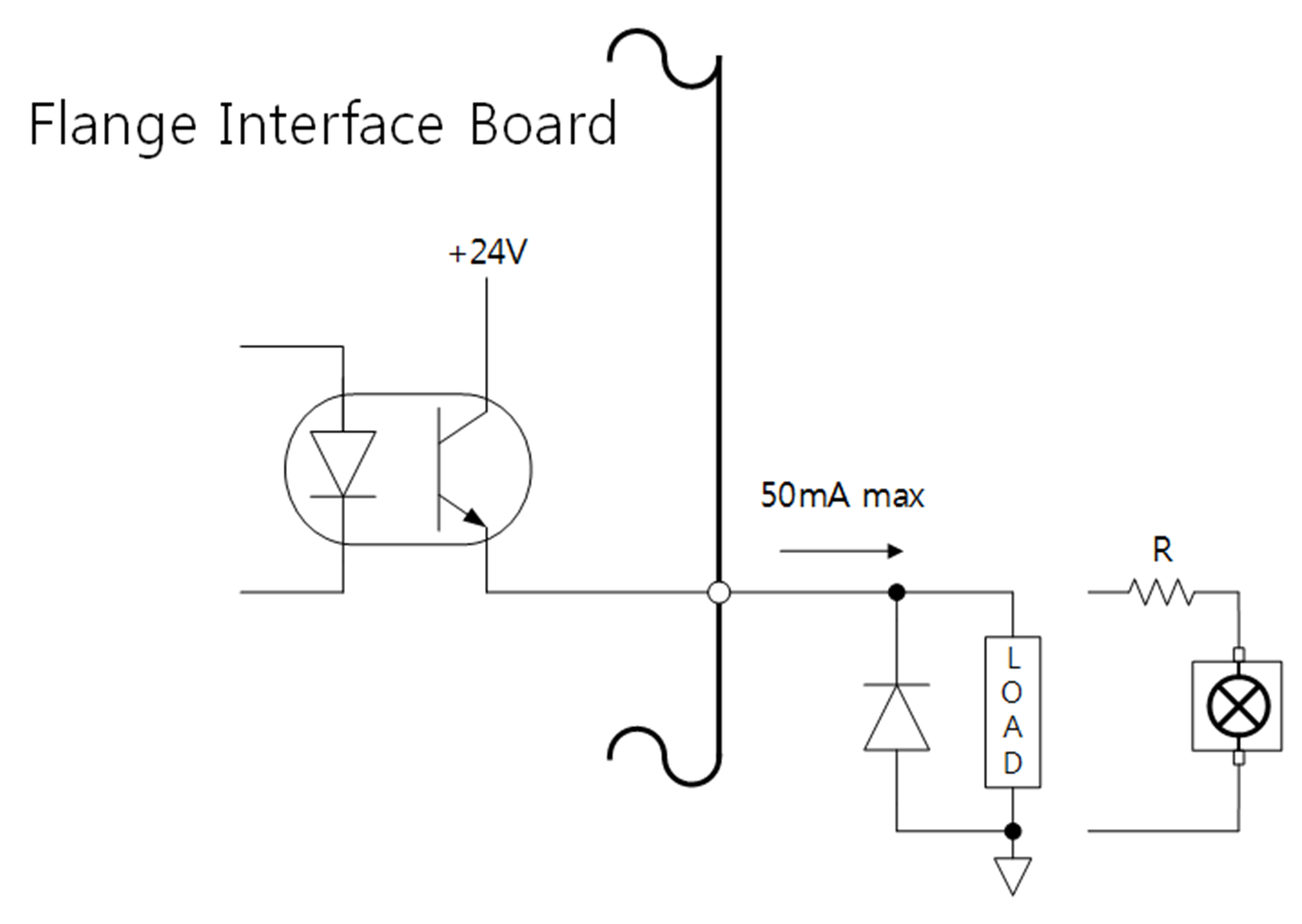
Peremes digitális kimenet műszaki adatai
A peremes digitális kimenet PNP specifikáció, és a fotócsatoló kimenete a kimeneten van beállítva.
A digitális kimenet aktiválásakor a megfelelő kimeneti csatorna +24V lesz. Ha a digitális kimenet le van tiltva, a megfelelő kimeneti csatorna állapota nyitott (lebegő).
A digitális kimenet elektromos specifikációi a következők:
|
Paraméter |
Min |
Típus |
Max |
Egység |
|---|---|---|---|---|
|
Feszültség 10 ma-es vezetésnél |
23 |
- |
- |
V |
|
Feszültség 50 ma-es vezetésnél |
22,8 |
- |
23,7 |
V |
|
Áramerősség vezetés közben |
0 |
- |
50 |
Ma |
A beállítás 2024. Április 11. Óta a következőképpen változott
A digitális ou kimenetek két különböző módot támogatnak:
|
Mód |
Aktív |
Inaktív |
|---|---|---|
|
PNP (forrás típusa, alapértelmezett) |
Magas |
Nyissa meg |
|
NPN (mosogató típusa) |
Alacsony |
Nyissa meg |
A peremes bemenet/kimenet (I/O) kezdeti teljesítménye 24 V-ra van állítva, és 0 V-ra vagy 12 V-ra állítható.
A megfelelő kimeneti csatorna + + + 12V vagy + + 24V lesz, amikor a digitális kimenet aktiválva van.
Ha a digitális kimenet le van tiltva, a megfelelő kimeneti csatorna állapota nyitott (lebegő).
A digitális kimenet elektromos specifikációi a következők:
|
Paraméter |
Min |
Típus |
Max |
Egység |
|---|---|---|---|---|
|
Feszültség 12 V-os üzemmódban |
11,4 |
12 |
12,6 |
V |
|
Feszültség 24 V üzemmódban |
22,8 |
24 |
25,2 |
V |
|
Áramerősség vezetés közben |
0 |
- |
50 |
Ma |
Vigyázat
-
A digitális kimenet nem függ az áramkorlátozástól. A fent leírt előírások figyelmen kívül hagyása működés közben a termék maradandó károsodását okozhatja.
-
Az alábbi ábra egy példa a digitális kimeneti beállításra, ezért a szerszám és a fogószerkezet csatlakoztatásakor olvassa el azt.
-
Ügyeljen arra, hogy az áramkör beállításakor húzza ki a robotból a tápellátást.
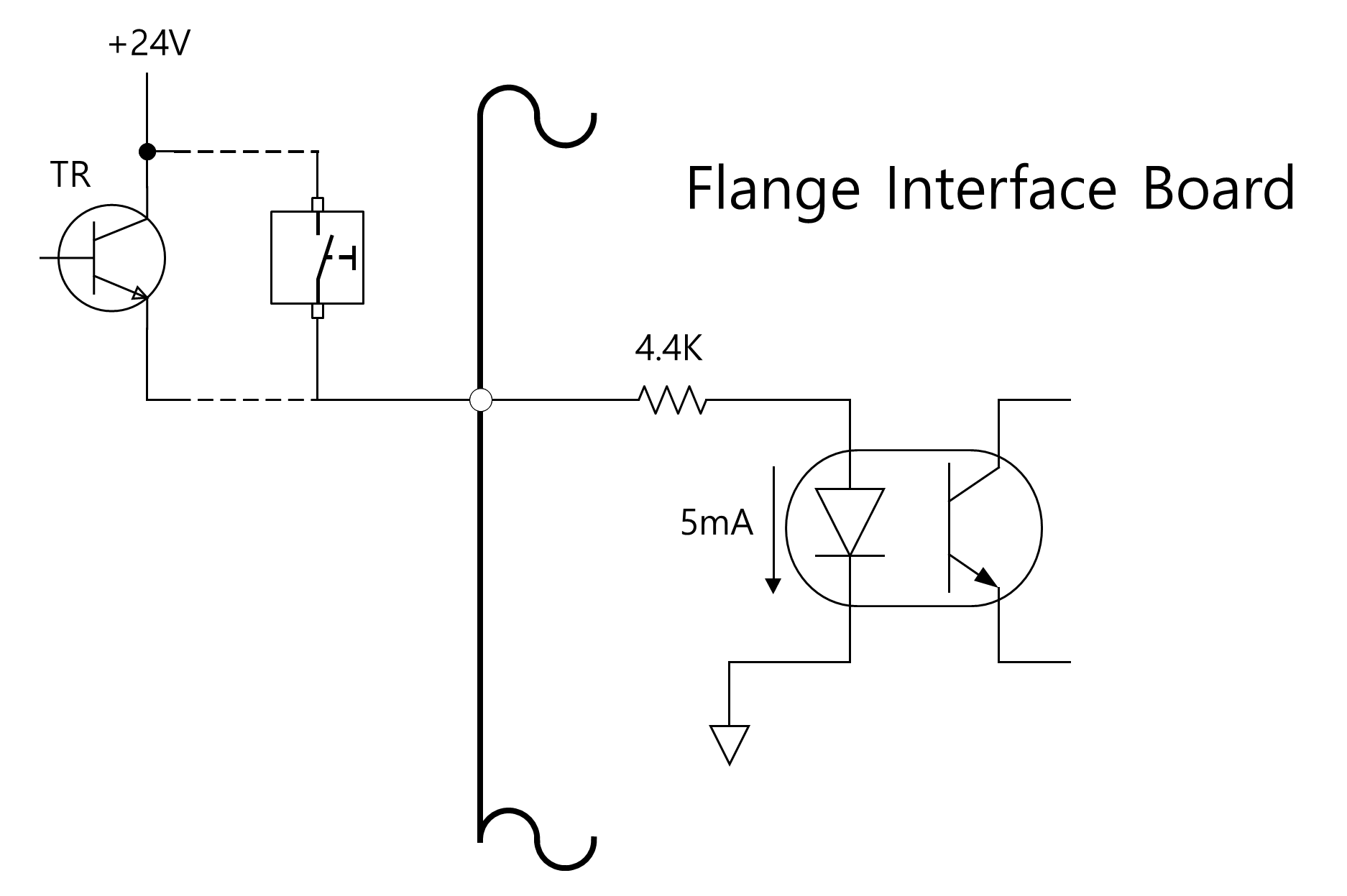
Peremes digitális bemenet műszaki adatai
A peremes digitális bemenet egy fotócsatoló bemenettel rendelkezik.
A 24 V-os bemeneten alapuló áram belső ellenállása 5 ma-re korlátozza.
A digitális bemenet elektromos specifikációi a következők:
|
Paraméter |
Min |
Típus |
Max |
Egység |
|---|---|---|---|---|
|
Bemeneti feszültség |
0 |
- |
26 |
V |
|
Logikai magas |
4,4 |
- |
- |
V |
|
Logikai alacsony |
0 |
- |
0,7 |
V |
|
Bemeneti ellenállás |
- |
4.4k |
- |
Ω |
Vigyázat
-
Az alábbi ábra egy példa a digitális bemenet beállítására, ezért tekintse meg a bemeneti eszköz csatlakoztatása során.
-
Ügyeljen arra, hogy az áramkör beállításakor húzza ki a robotból a tápellátást.
Peremes analóg bemenet műszaki adatai
Külső eszközökről fogad feszültség- vagy áramjeleket.
Az analóg bemenet beállítható feszültség (0-10V) vagy áram (4-20mA) értékre.
Az elektromos jellemzők az alábbiakban láthatók.
|
Paraméter |
Min |
Típus |
Max |
Egység |
|---|---|---|---|---|
|
Bemeneti feszültség feszültség üzemmódban |
0 |
- |
10 |
V |
|
Bemeneti áram az aktuális módban |
4 |
- |
20 |
Ma |
|
Felbontás |
- |
12 |
- |
bit |