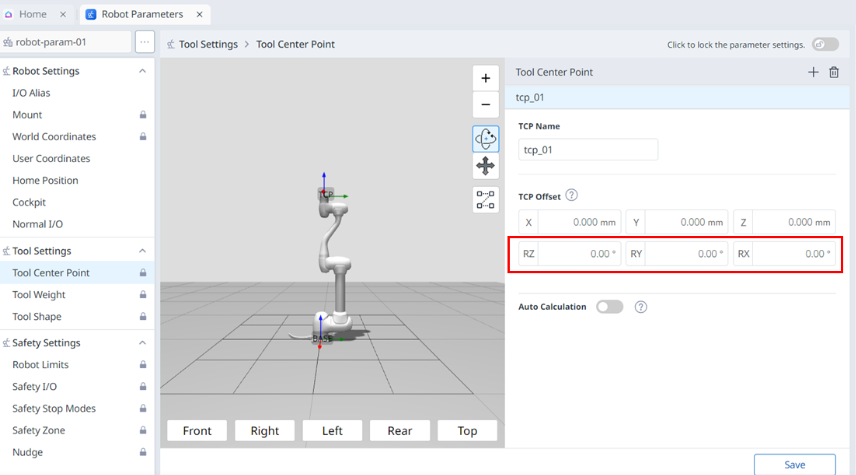
Szerszám középpontja
Az eszköz középpontjának (TCP) konfigurálásakor a perem koordinátái alapján meg kell határozni a pozíciót és a forgási szöget is. ime, a karima koordinátájának alapértelmezett kezdőpontjától (TCP) az X, Y és z irányban nem lehet 10000 mm-nél nagyobb távolságra beállítani. Azt is meg kell jegyezni, hogy az erőszabályozás, a megfelelőség-ellenőrzés és a közvetlen tanítási pont rögzítése csak akkor áll rendelkezésre ![]()
Ha az eszköz középpontját (TCP) az Auto Calculate (Automatikus számítás) segítségével konfigurálják, a számítás csak az X, Y és z pozíciókon alapul, ezért meg kell adni a forgási szöget. A forgási szög az RZ, RY és RX segítségével határozható meg, és az Euler z-Y-z forgási módszer alapján.
A koordinátatengely X, y, z és X, Y, z koordinátatengelyben kifejezett meghatározása a következő:
-
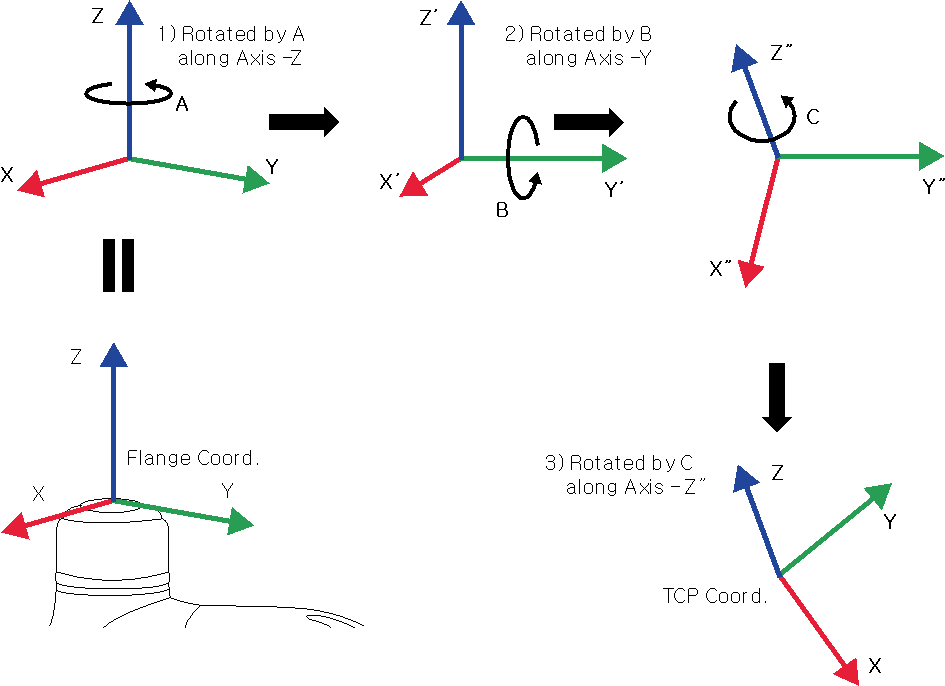
A „karimakoordináta” koordinátatengelye (x, y, z): A karima végén meghatározott „karima koordináta” koordinátatengelyének iránya megegyezik a robot koordinátájával, amikor a robot csuklószöge (0,0,0,0,0,0).
-
A „TCP-koordináta” koordinátatengelye (X, Y, z): Ez a karima végén vagy a munkaponton van beállítva. Ekkor a „TCP-koordináta” forgási szögét a következő „karima-koordináta” alapján határozzuk meg 1) és 3) között:
-
Forgassa el Egy fokkal a karima koordinátájának z tengelye mentén.
-
Forgassa el a B fokokat a 1 szerint elforgatott koordináta y’ tengelye mentén.
-
Forgassa el a C fokot a 2 szerint elforgatott koordináta z’ tengelye mentén.
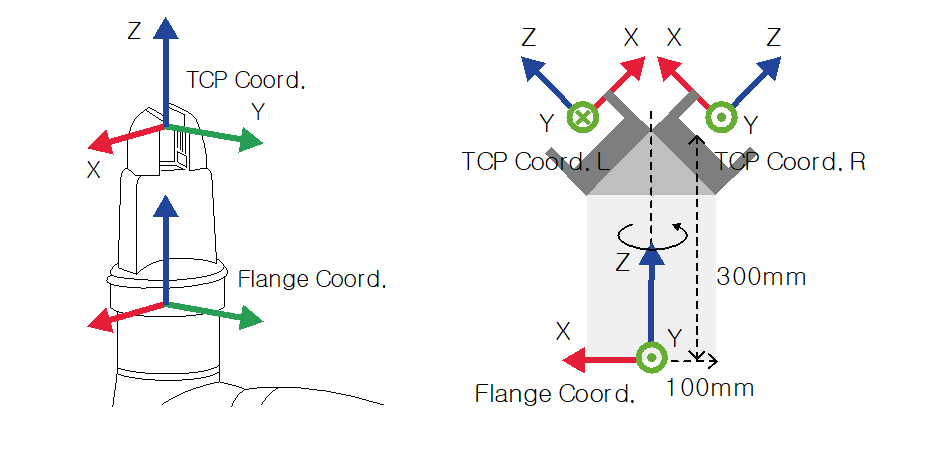
Íme néhány példa a TCP beállítására a fent leírt módszer szerint:
-
[X, Y, z, Rz, ry, Rx] = [0, 0, 100, 0, 0, 0]: Általános Gripper csak z irányú eltolással (TCP Coord)
-
[X, Y, z, Rz, ry, Rx] = [100, 0, 300, 180, -45, 0]: Bal Gripper 45 fokos szögben (TCP Coord. L)
-
[X, Y, z, Rz, ry, Rx] = [-100, 0, 300, 0, -45, 0]: Right Gripper 45 fokos szögben (TCP Coord. R)
Unknown Attachment
Menü
|
Elemek |
Leírás |
|
|---|---|---|
|
1 |
Zárolás billenőgombja |
A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
|
2 |
3D szimuláció |
Itt szimulálhatja a konfigurált szerszámközpont-pontot. |
|
3 |
Hozzáadás |
Ez a gomb lehetővé teszi a TCP hozzáadását. |
|
4 |
Törlés |
Ezzel a gombbal törölheti a kiválasztott TCP-t. |
|
5 |
Mentés |
Ezzel a gombbal menthetők a beállítási értékek. |
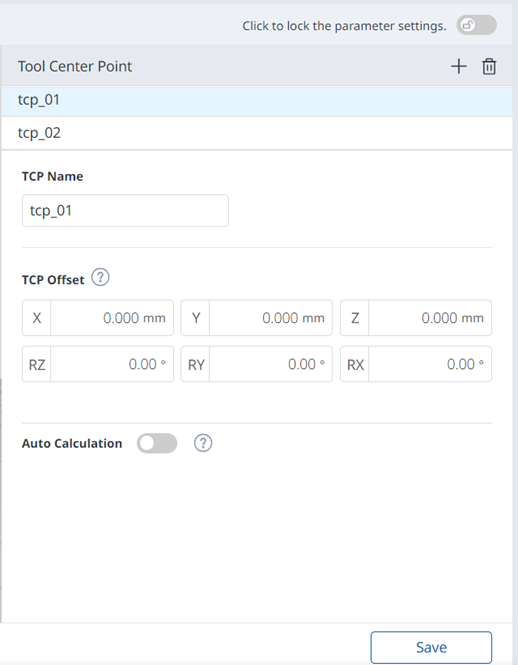
Ha a beállítások zárolva vannak, az alábbi képernyő látható.
Unknown Attachment
Ekkor a kiválasztott TCP kék színnel jelenik meg az alábbiak szerint.
Szerszám súlya
A karimára szerelt szerszám súlyát szerszámsúly hozzáadásával állíthatja be. A szerszám súlyát a Robot Parameters > Tool Settings > Tool Weight (Robot paraméterek > Eszközbeállítások > Eszközsúly) kiválasztásával állíthatja be.
-
A szerszám súlya az automatikus mérés funkcióval mérhető.
-
Ajánlott minden egyes munkadarabhoz szerszámsúlyt hozzáadni. Ha a munkadarab súlya túl nehéz, a robot külső erőként ismerheti fel a munkadarab súlyát. Ez azért van, mert a robot ezt a külső erőt ütközésként határozza meg, és megáll.
-
Feladat létrehozásakor változtassa meg a súlyt a folyamat szerint, hogy megváltoztassa a szerszám súlyát. Például konfigurálható egy feladat, hogy kiválassza a szabványos szerszámsúlyt, mielőtt felveszi a munkadarabot, és a munkadarab felvétele után válassza ki a szerszámsúlyt a munkadarabhoz.
Az aktivált szerszámsúly elem a szerszám szokásos súlyaként állítható be a ![]()
-
Az eszközbeállítás készlete megegyezik a többi parancs készletével. A Set (Beállítás) parancs akkor használható, ha egy feladat végrehajtása közben módosítja az eszköz súlyát. További információkért tekintse meg a Feladatszerkesztő modult .
Megjegyzés
-
Legfeljebb ötven különböző szerszámsúly regisztrálható.
-
Az M sorozat esetében a gyorsulás automatikusan beállítódik, ha a maximális szerszámsúly meghaladja a maximális szerszámsúlyt.
Unknown Attachment
Unknown Attachment
Menü
|
Elemek |
Leírás |
|
|---|---|---|
|
1 |
Zárolás billenőgombja |
A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
|
2 |
Hozzáadás |
Ez a gomb lehetővé teszi új szerszám súly hozzáadását. |
|
3 |
Törlés |
Ezzel a gombbal törölheti az eszköz súlyát. |
|
4 |
Szerszám súlylista |
A konfigurált szerszámsúlyok listája. |
|
5 |
Eszköz súlyának neve |
Itt adhatja meg az eszköz súlyának nevét. |
|
6 |
Automatikus mozgás mérése |
Ezzel a gombbal futtathatja az automatikus mérést. |
|
7 |
Automatikus mérés |
Ez a gomb lehetővé teszi, hogy válasszon egy lehetőséget, és futtasson egy automatikus mérést. |
|
8 |
Mozgás kiválasztása |
A kívánt mozgást a lehetőségek közül választhatja ki. |
|
9 |
A súly használatának kiválasztása |
Kiválaszthatja, hogy a súlyt használja-e. Ez a választómező le van tiltva az e sorozat vagy az FPT-érzékelők nélküli sorozat esetén. |
|
10 |
Súly bemenet |
Itt adhatja meg a kívánt súlyt. |
|
11 |
A Gravitációs Központ használatának kiválasztása CX |
A CX súlypont használata választható. |
|
12 |
CX bemenet |
CX megadható. |
|
13 |
A Gravitációs Központ használatának kiválasztása CY |
A súlypont CY használata választható. |
|
14 |
CY bemenet |
A CY-t be lehet írni. |
|
15 |
A Gravity Center CZ használatának kiválasztása |
A CZ súlypont használata választható. |
|
16 |
CZ bemenet |
A CZ-t be lehet írni. |
|
17 |
A tehetetlenséget használja |
Ez a jelölőnégyzet lehetővé teszi annak kiválasztását, hogy használjunk-e tehetetlenséget. |
|
18 |
Lxx bemenet |
A tehetetlenségre vonatkozó lxx bejegyzés megadható. |
|
19 |
Lyy bemenet |
A tehetetlenségre vonatkozó lyy-bejegyzés megadható. |
|
20 |
Lzz bemenet |
A tehetetlenségre vonatkozó lzz-bejegyzés megadható. |
|
21 |
Lxy bemenet |
A tehetetlenségre vonatkozó Lxy-bejegyzés megadható. |
|
22 |
Lyz bemenet |
A tehetetlenségre vonatkozó lyz-bejegyzés megadható. |
|
23 |
LZX bemenet |
A tehetetlenségre vonatkozó lzx-bejegyzés megadható. |
|
24 |
Mentés |
Ezzel a gombbal mentheti a beállítási értékeket. |
Szerszám alakja
A karimára szerelt szerszám alakja szerszám alakjának hozzáadásával állítható be.
Az eszköz alakját a Robot Parameters (Robot paraméterek) modul > Tool Settings (Eszközbeállítások) > Tool Shape (Eszköz alakja) További információkért tekintse meg a Szerszám alakzatot.
-
A robot a robot végének TCP (Tool Center Point) és a robottest alapján határozza meg a helykorlát megsértésének állapotát. Ha a tényleges robot szerszámalakja nagyobb, mint a TCP beállítása, akkor a munkadarab és a szerszám védelme érdekében hozzá kell adni egy szerszám alakzatot.
-
Legyen óvatos, mert a robot által manőverezhető zóna csökken, ha a szerszám alakja túl nagy.
Az eszközalak elem csak akkor érhető el, ha regisztrálták (megerősítve), és a billenőkapcsoló engedélyezve van. Az aktivált szerszám alakzat elem beállítható standard szerszámalakzatként a Set tool ikon ( ![]()
-
Az eszközbeállítás készlete megegyezik a többi parancs készletével. A Set (Beállítás) parancs akkor használható, ha egy feladat végrehajtása közben módosítja az eszköz alakját. További információkért tekintse meg a Feladatszerkesztő modult.
Megjegyzés
Legfeljebb ötven különböző szerszámforma regisztrálható.
Unknown Attachment
Menü
|
Elemek |
Leírás |
|
|---|---|---|
|
1 |
Zárolás billenőgombja |
A beállított érték zárolására szolgál. A beállított érték módosításához biztonsági jelszó szükséges. |
|
2 |
3D szimuláció |
Itt szimulálhatja 3D-ben a konfigurált eszköz alakzat eredményét. |
|
3 |
Eszköz alakzat neve |
A konfigurált eszköz neve. |
|
4 |
Szerszám alakú forma |
A konfigurált eszköz alakja. |
|
5 |
Szerszám alakzat szerkesztése |
Ezzel a gombbal szerkesztheti a konfigurált eszköz alakzatot. |
|
6 |
Eszköz alakzat törlése |
Ezzel a gombbal törölheti a kijelölt eszköz alakzatot. |
|
7 |
Eszköz alakzat hozzáadása |
Szerszám alakzat adható hozzá. |
|
8 |
Alkalmazás |
Ezzel a gombbal a beállítás után alkalmazhatja az Eszköz alakzatot. |
Unknown Attachment
Menü
|
Elemek |
Leírás |
|
|---|---|---|
|
1 |
Szerszám alakja |
Ez azt jelzi, hogy ez az ablaktábla egy Eszköz alakú felugró ablak. |
|
2 |
Név megadása |
Ez egy olyan mező, ahol az Eszköz alakzat neve megadható. |
|
3 |
Figyelmeztető üzenet |
A beállításkor legyen óvatos |
|
4 |
Adjon hozzá új cuboidot |
Ez a gomb lehetővé teszi a cuboid hozzáadását. |
|
5 |
Új gömb hozzáadása |
Ez a gomb lehetővé teszi egy gömb hozzáadását. |
|
6 |
Adjon hozzá új kapszulát |
Ez a gomb lehetővé teszi egy kapszula hozzáadását. |
|
7 |
Mégse |
Ezzel a gombbal visszavonhatja a beállítást. |
|
8 |
Erősítse meg |
Ez a gomb lehetővé teszi a beállítás megerősítését. |
A kocka/gömb/kapszula hozzáadása után a kijelző az alábbiak szerint látható.
|
Unknown Attachment |
Unknown Attachment |
|
Unknown Attachment |
|