This is a command for teaching the target pose with a screwdriver and installing bolts while moving from the start pose to the teaching pose, considering bolt length.
-
If the screwdriver supports [Reverse Mode], it can remove bolts while moving from the teaching pose (bolt installation position) to the start pose.
Basic Information
|
Item |
Description |
|---|---|
|
Recommended Device |
Screw Driver |
|
Optinal Features |
|
|
Command Completion Condition |
|
|
Support Robot Series |
E, A, AS, M, H |
Default Motion Sequence
-
Default Mode
Move to [Approach Pose] → Move to Start Pose (point from [Reference Pose] - [Bolt Length]) → Move to [Reference Pose] (if [Pattern] is set, move to Pattern Calculation Pose) → [Run] action of [End Effector] (in case of [Vacuum Type], [Vacuum_On]) → Move to [Retract Pose]
-
[Reverse Mode]
Move to [Approach Pose] → Move to [Reference Pose] (if [Pattern] is set, move to Pattern Calculation Pose) → Move to Start Pose (point from [Reference Pose] - [Bolt Length]) → [Run] action of [End Effector] → Move to [Retract Pose]
Definition of Screen
|
Item |
Description |
Default Value and Input Range |
|
|---|---|---|---|
|
Basic Setting |
End Effector |
I/O test available upon tool selection |
|
|
Pattern |
Select if a pattern is used |
|
|
|
Reference Pose |
Teaching Pose
|
|
|
|
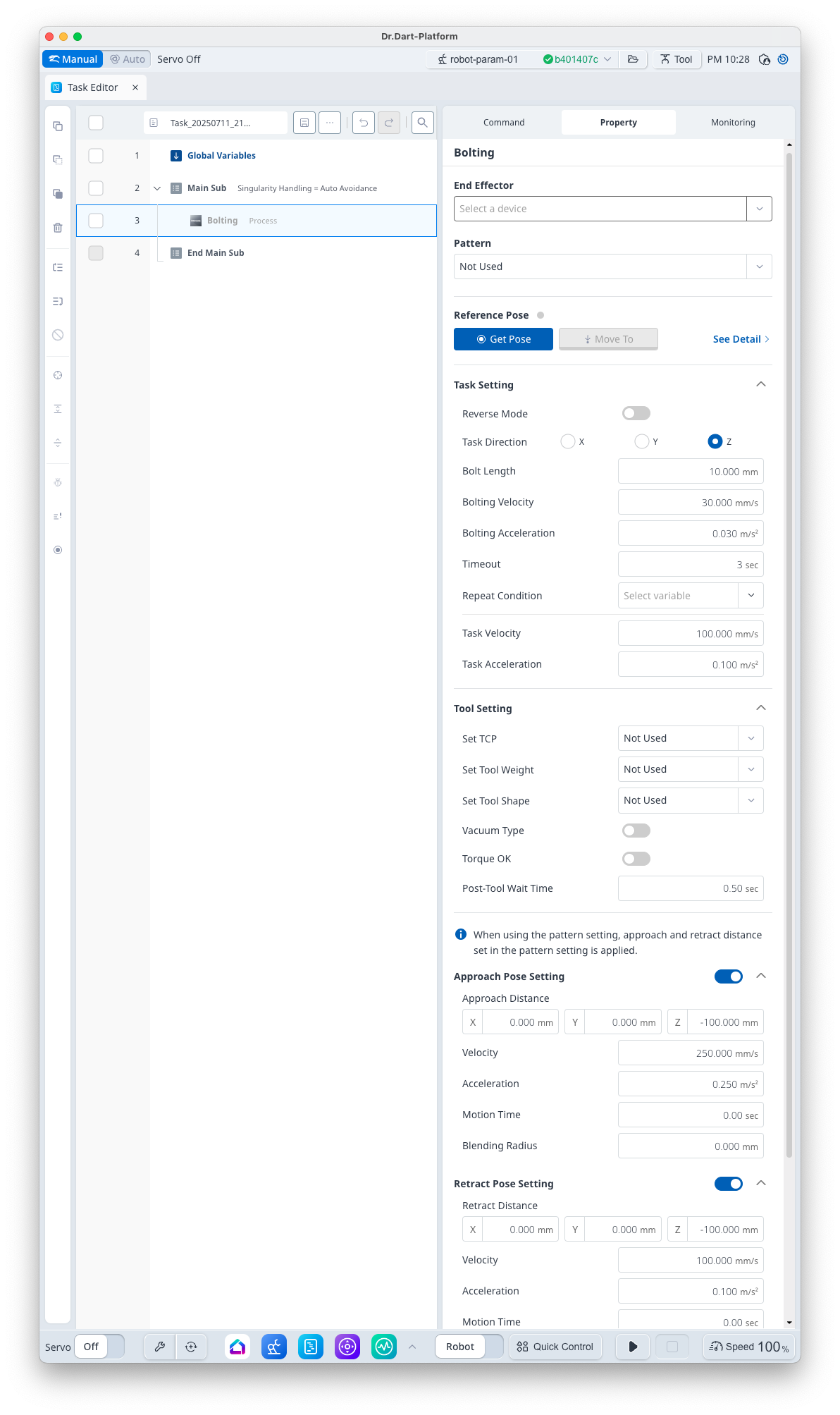
Task Setting |
Reverse Mode (Option) |
Reverse Mode Setting |
False [True, False] |
|
Task Direction |
Bolt Installation Orientation |
Z [X, Y, Z] |
|
|
Bolt Length |
Bolt Length |
10 mm [0 ~ 200] |
|
|
Bolting Velocity |
Bolting Velocity |
30 mm/s [0.001 ~ 8000] |
|
|
Bolting Acceleration |
Bolting Acceleration |
0.03 m/s2 [0.001 ~ 20] |
|
|
Timeout |
Bolting End Time |
3 s [0 ~ 10000] |
|
|
Repeat Condition |
Select Repeat Index
|
|
|
|
Task Velocity |
This is the velocity from the approach pose to teaching pose.
|
100 mm/s [0.001 ~ 8000] |
|
|
Task Acceleration |
This is the acceleration from the approach pose to teaching pose.
|
0.1 m/s2 [0.001 ~ 20] |
|
|
Tool Setting |
Set TCP (Option) |
Select TCP |
Not Used [TCP items set in robot parameter] |
|
Set Tool Weight (Option) |
Select Tool Weight
|
Not Used [Tool Weight items set in robot parameter] |
|
|
Set Tool Shape (Option) |
Select Tool Shape |
Not Used [Tool Shape items set in robot parameter] |
|
|
Vacuum Type (Option) |
Select Vacuum Support Status |
False [True, False] |
|
|
Torque OK (Option) |
Select Bolt Installation Completion Status Check |
False [True, False] |
|
|
Post-Tool Wait Time |
This is the standby time after [Run] action of [End Effector]. |
0.5 s [0 ~ 10000] |
|
|
Approach Pose Setting (Option) |
Use |
Select whether to use Approach Pose |
True [True, False] |
|
Approach Distance |
Distance from the teaching pose in x, y and z directions
|
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
Velocity |
This is the motion velocity to the approach pose. |
250 mm/s [0.001 ~ 8000] |
|
|
Acceleration |
This is the motion acceleration to the approach pose. |
0.25 m/s2 [0.001 ~ 20] |
|
|
Motion Time |
This is the motion time to the approach pose.
|
0 s [0 ~ 10000] |
|
|
Blending Radius |
This is the blending radius connecting the movement between the approach pose and the teaching pose.
|
0 mm [0 ~ 1000] |
|
|
Retract Pose Setting (Option) |
Use |
Select whether to use Retract Pose |
True [True, False] |
|
Retract Distance |
Distance from the teaching pose in x, y and z directions |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
Velocity |
This is the motion velocity to the retract pose. |
100 mm/s [0.001 ~ 8000] |
|
|
Acceleration |
This is the motion acceleration to the retract pose. |
0.1 m/s2 [0.001 ~ 20] |
|
|
Motion Time |
This is the motion time to the retract pose.
|
0 s [0 ~ 10000] |
|
|
Blending Radius |
This is the blending radius connecting the movement between the teaching pose and the retract pose. |
0 mm [0 ~ 1000] |
|
|
Compliance Control Setting (Option) |
Use |
Select whether to use the Compliance Control |
False [True, False] |
|
Stiffness |
Stiffness Setting |
x=y=z
rx=ry=rz
|
|