Roboter von Doosan Robotics bieten 9 Bewegungen. Die Roboterbewegung wird durch Standardbewegungen, MoveJ und MoveL gesteuert, und 7 Bewegungen, die von diesen beiden Bewegungen abgeleitet werden.
Typen der Roboterbewegung
|
|
Bewegung |
Funktion |
|---|---|---|
|
1 |
MoveJ |
Jedes Gelenk des Roboters bewegt sich vom aktuellen Winkel zum Zielwinkel und stoppt gleichzeitig
|
|
2 |
MoveL |
Der Roboter bewegt sich zum Zielpunkt, während die Roboter-TCP gerade bleibt
|
|
3 |
MoveSJ |
Der Roboter bewegt sich durch alle vom Roboter festgelegten Winkel
|
|
4 |
MoveSX |
Roboter-TCP bewegt sich über alle Punkte hinweg
|
|
5 |
MoveJX |
Die Roboterposition wird als Roboter-TCP festgelegt, der sich zum Zielpunkt bewegt
|
|
6 |
MoveC |
Roboter-TCP bewegt sich zum Zielpunkt, während ein Bogen beibehalten wird 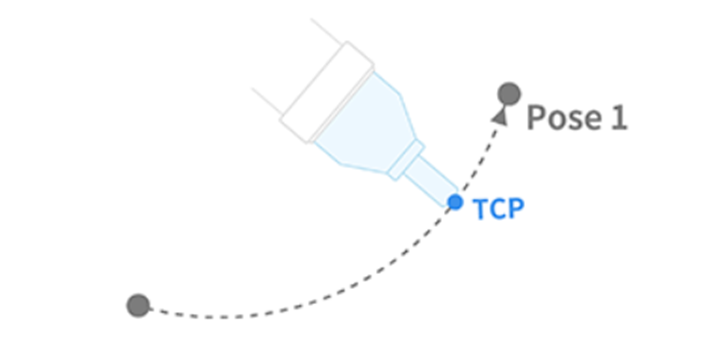
|
|
7 |
MoveB |
Der Roboter bewegt sich durch einen Abschnitt, der aus kontinuierlichen geraden Linien und Bögen besteht, zum endgültigen Zielpunkt 
|
|
8 |
MoveSpiral |
Der Roboter bewegt sich von der Spiralmitte zum maximalen Radius 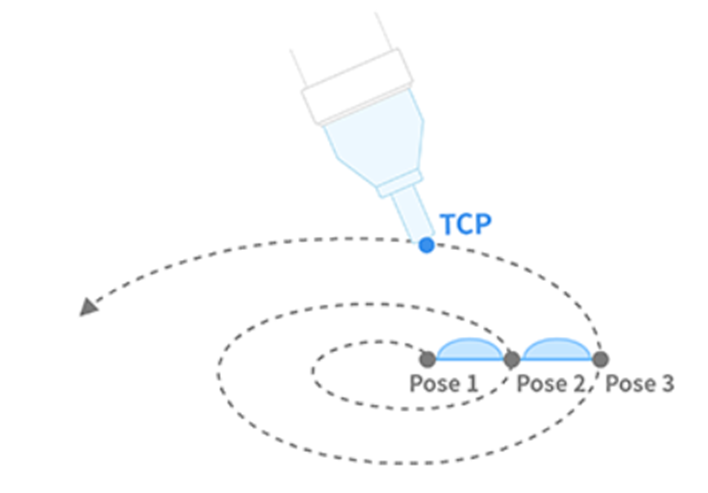
|
|
9 |
MovePeriodic |
Der Roboter bewegt sich in einer Bahn mit konstanter Amplitude und konstantem Zyklus 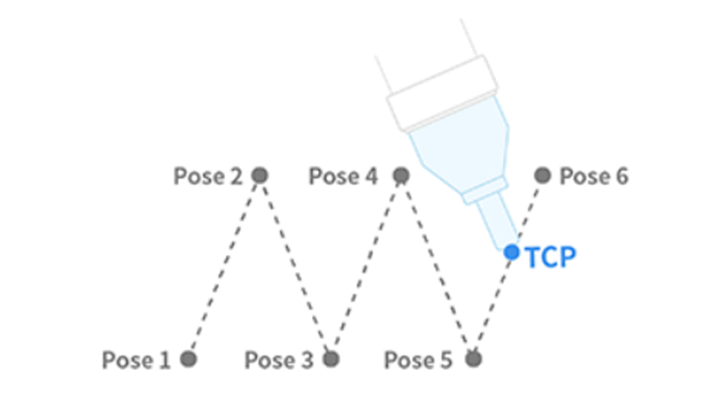
|
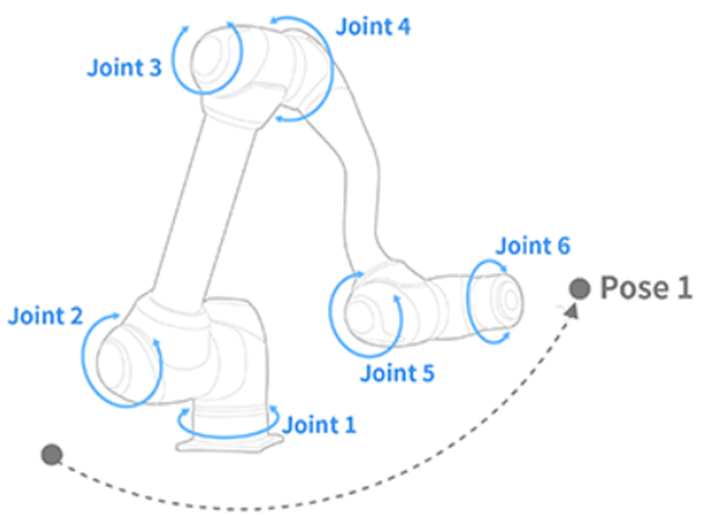
MoveJ&MoveL
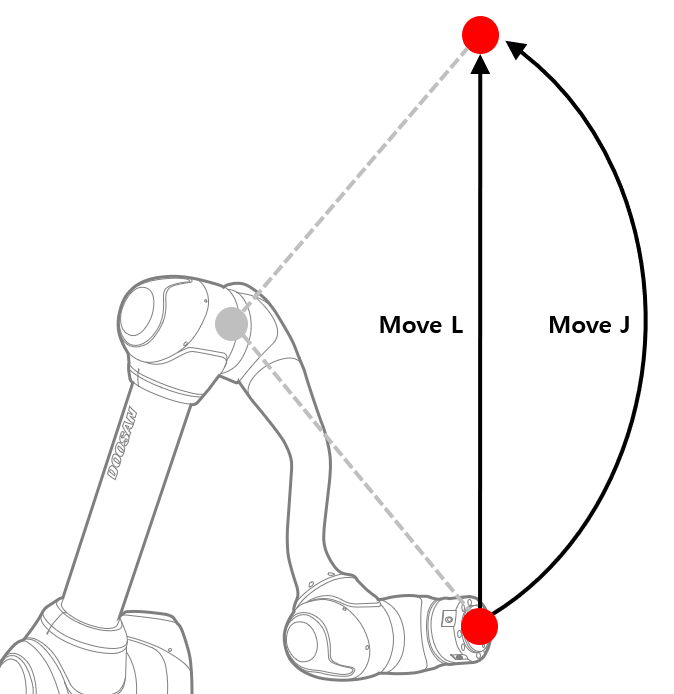
Vor der Verwendung der Roboterbewegung ist es wichtig, die Standardbewegungen MoveJ und MoveL zu verstehen.
-
J in MoveJ bezieht sich auf Verbindungen. Bei dieser Bewegung bewegt sich jedes Gelenk zum Zielwinkel und stoppt gleichzeitig.
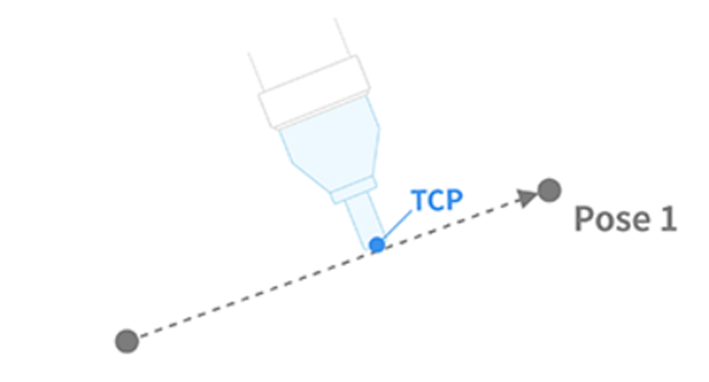
-
L in MoveL bezieht sich auf linear. Bei dieser Bewegung bewegt sich der TCP am Roboterende mit linearer Bewegung in die Zielposition (Position und Winkel).
|
|
Typ |
MoveJ |
MoveL |
|---|---|---|---|
|
1 |
Methode Verschieben |
|
|
|
2 |
Vorteil |
|
|
|
3 |
Nachteil |
|
|
|
4 |
Nutzung |
|
|