Menü
|
|
Artikel |
Beschreibung |
|---|---|---|
|
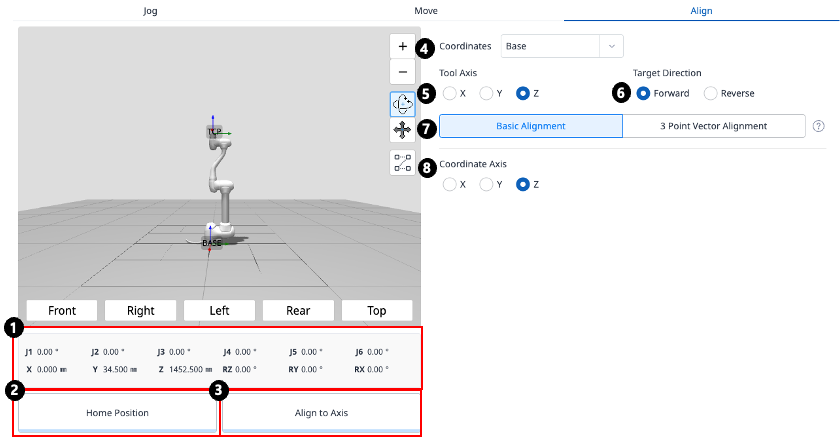
1 |
Roboterhaltung |
Zeigt die Gelenk- und Aufgabenstellung des aktuellen Roboters an.
|
|
2 |
Taste Ausgangsposition |
Bewegt den Roboter in die Ausgangsposition, wenn er angeklickt wird. |
|
3 |
Schaltfläche „Ausrichten“ |
Richtet den Roboter aus, wenn Sie darauf klicken. |
|
4 |
Wählen Sie Referenzkoordinatensystem Aus |
Wählen Sie das Referenzkoordinatensystem für die Positionierung aus. |
|
5 |
Werkzeugachse |
Wählen Sie die Achse der TCP aus, die ausgerichtet werden soll. |
|
6 |
Zielrichtung |
Wählen Sie die Richtung aus, an der die TCP ausgerichtet werden soll. |
|
7 |
Ausrichtungsmethode |
Wählen Sie die Ausrichtungsmethode aus.
|
|
8 |
Koordinatenachse |
Wählen Sie die Achse des Referenzkoordinatensystems aus, an der ausgerichtet werden soll. |
|
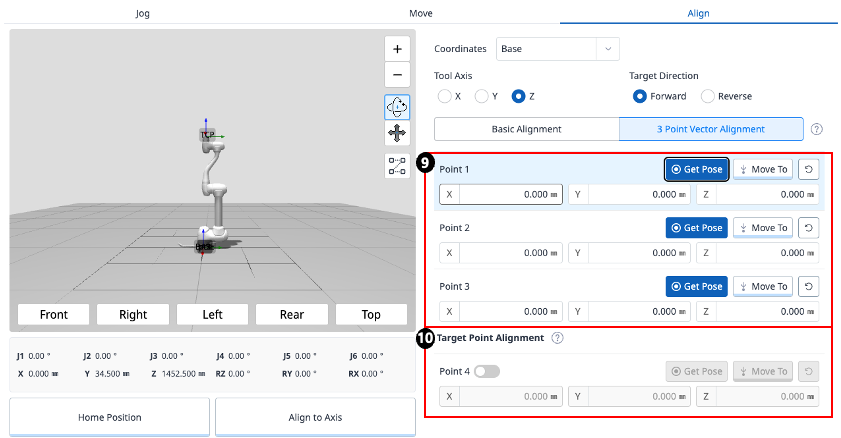
9 |
Wählen Sie Punkte auf einer Ebene aus |
Wählen Sie drei Punkte aus, die Ebene definieren. 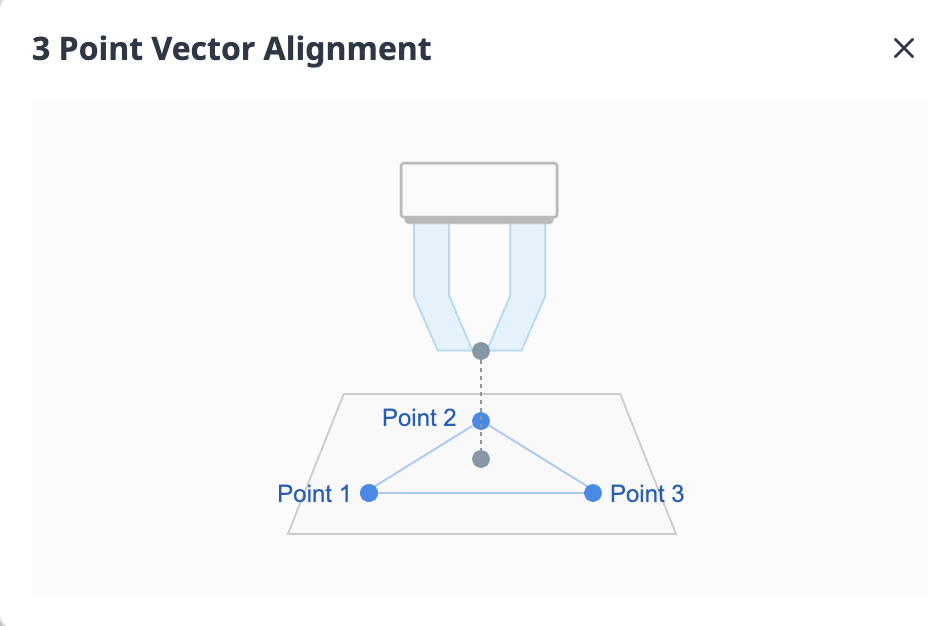
|
|
10 |
Zielpunktausrichtung |
Wählen Sie einen Punkt aus, um die TCP zu positionieren.
|