Power off the system
MANDATORY EASY 1 MIN
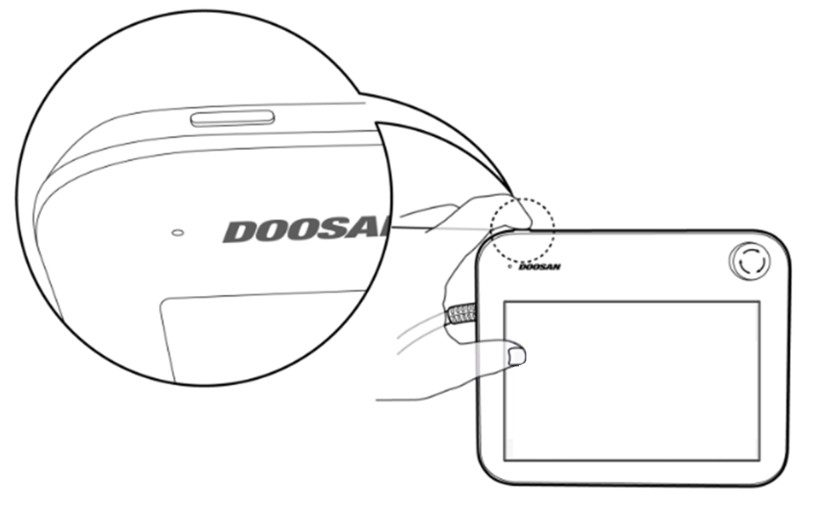
Press the shutdown button on the teach pendant or press and hold the power button on the upper left of the teach pendant for 2 seconds to turn off the system.
-
The shutdown popup is displayed on the screen.
-
Press the OK button on the shutdown popup to properly shutdown the system.
Caution
-
Press and hold the power button for more than 4 seconds to force system shutdown.
-
Forced shutdown may cause robot and controller failure.
Connect wires
MANDATORY NORMAL 10 MIN
Connect the necessary cables to the flange I/O connectors after the tool is fixed. The pin map of the flange I/O must be checked.
-
When power is supplied to the robot, the fifth terminal of each connector always outputs 24V.
-
For more information, refer to Flange I/O.
Caution
-
Make sure to cut off the robot’s power when connecting the tool and gripper.
-
Make sure to configure tool and gripper measures to prevent workpieces falling from the tool when the robot power is cut off.
Note
To control/monitor the robot using an external device, connect the controller I/O or connect to a network, such as Modbus TCP, PROFITNET or EtherNet/IP.
-
For more information, refer to Controller I/O Connection.
-
For more information, refer to Network Connection.
Power on the system
MANDATORY EASY 1 MIN
Turn the system power on again. Press and hold the power button until the teach pendant screen powers up.
Test controller and flange I/O
MANDATORY NORMAL 10 min
The teach pendant features a function capable of testing the operation of the tool connected to the flange I/O.
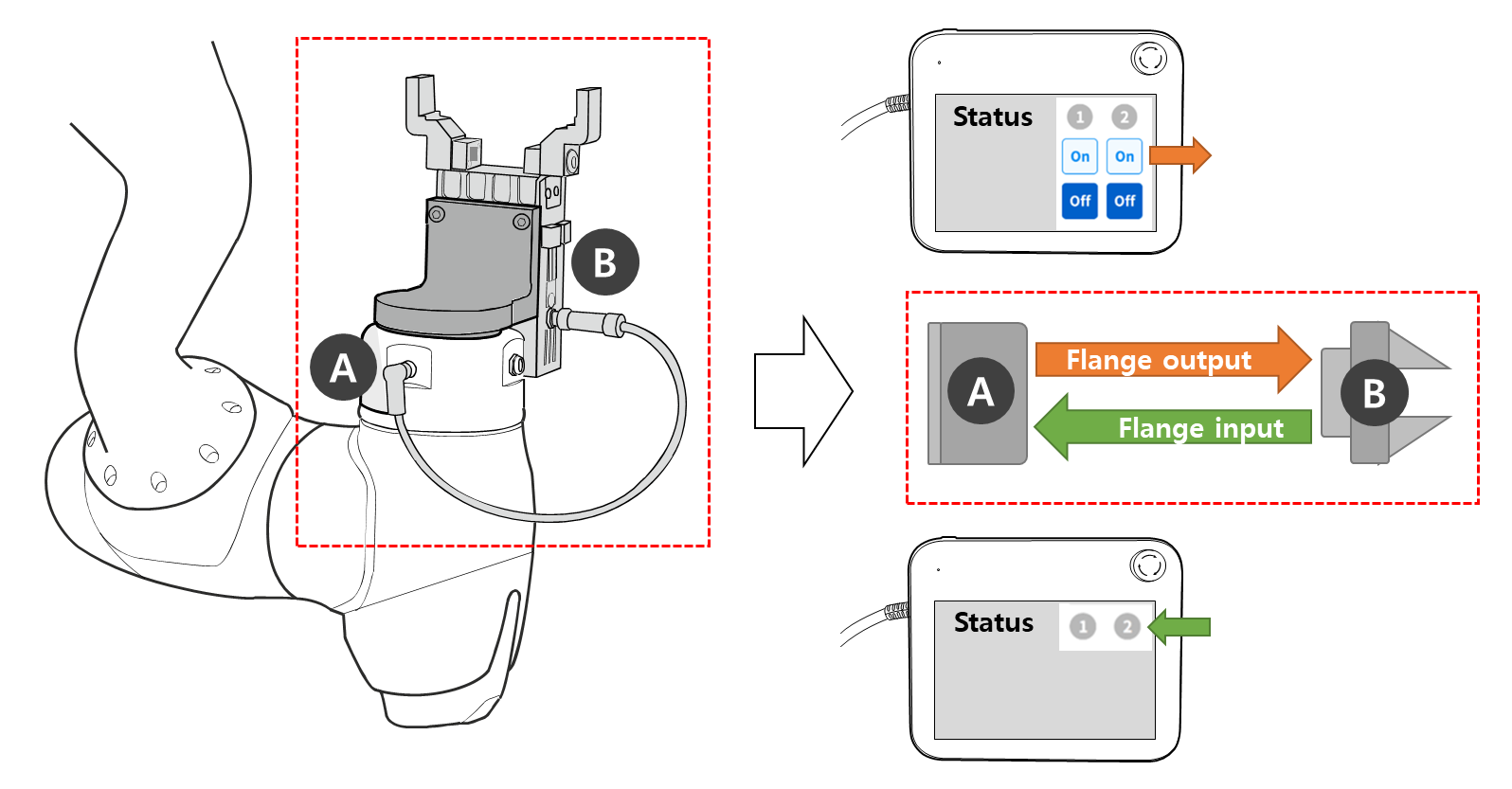
The following tests can be performed through Status > I/O Overview or I/O Test of the teach pendant screen. For more information, refer to each item.