Configuração de limites do robô
Em Limites do robô, vários limites relacionados ao robô podem ser definidos. Esses limites são usados para garantir que o robô opere com segurança dentro dos limites definidos.
Os limites do robô podem ser definidos em Parâmetro do robô > Configurações de segurança > Limites do robô.
-
Para obter uma descrição detalhada de cada limite, consulte Limites do robô.
Os limites do robô são amplamente divididos em 3 categorias. Cada categoria inclui as seguintes telas e funções.
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
TCP/Robô |
Grande classificação dos limites do robô. |
|
3 |
Redefinir |
Usado para redefinir as configurações. |
|
4 |
Força |
Usado para definir a força. |
|
5 |
Potência |
Usado para definir a energia. |
|
6 |
Velocidade |
Usado para definir a velocidade. |
|
7 |
Impulso |
Usado para definir o momento. |
|
8 |
Colisão |
Usado para definir a colisão. |
|
9 |
Salvar |
Usado para salvar a configuração aplicável. |
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Velocidade da junta |
Grande classificação dos limites do robô. |
|
3 |
Redefinir |
Usado para redefinir as configurações. |
|
4 |
J1 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
5 |
J2 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
6 |
J3 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
7 |
J4 (inativo para modelos da série P) |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
8 |
J5 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
9 |
J6 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
10 |
Salvar |
Usado para salvar a configuração aplicável. |
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Ângulo da junta |
Grande classificação dos limites do robô. |
|
3 |
Redefinir |
Usado para redefinir as configurações. |
|
4 |
J1 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
5 |
J2 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
6 |
J3 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
7 |
J4 (inativo para modelos da série P) |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
8 |
J5 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
9 |
J6 |
Usado para definir as configurações para os modos Normal e Reduzido, respectivamente. |
|
10 |
Salvar |
Usado para salvar a configuração aplicável. |
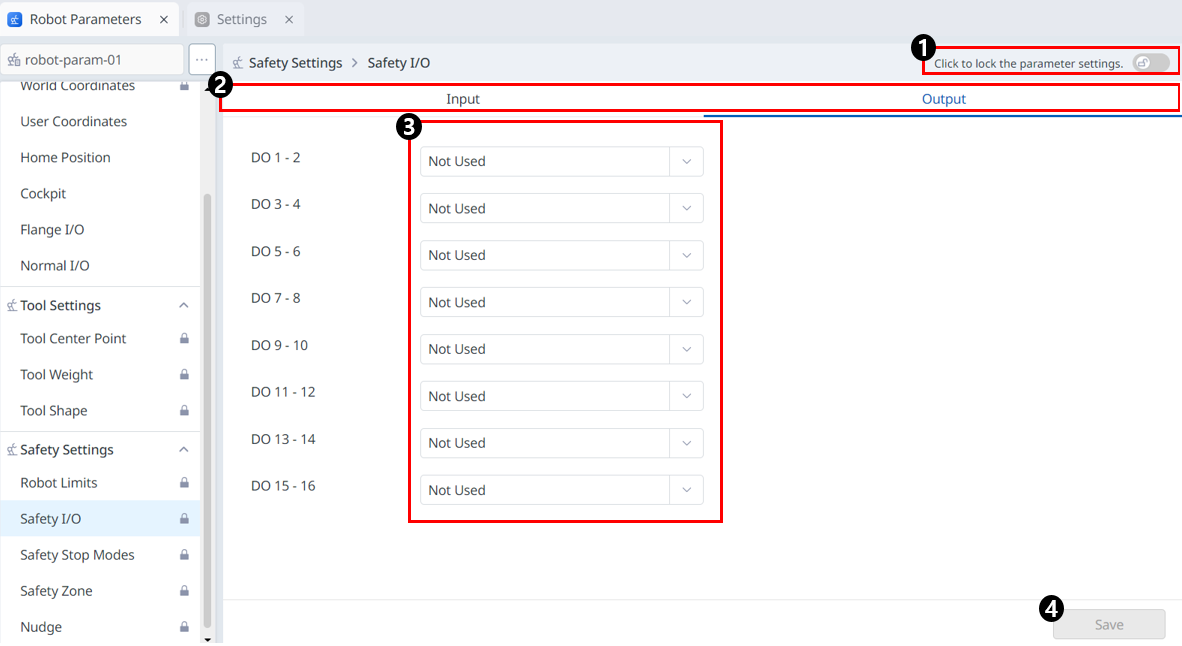
E/S de segurança
Essa função é usada para entrada/saída de sinais relacionados à segurança para os terminais redundantes. Se algum dos sinais de entrada/saída de segurança for detectado como tendo um sinal redundante diferente, ele determinará um circuito aberto ou falha de hardware e interromperá o robô no modo de parada STO.
-
Para definir a E/S de segurança, selecione Parâmetros do robô > Configurações de segurança > E/S de segurança.
Para obter mais informações, consulte E/S de sinal de segurança .
Entrada
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Entrada/Saída |
Qualquer Entrada/Saída pode ser selecionada para ser definida. |
|
3 |
Configuração do sinal |
Opções definidas para cada porta.
Não usado Batente de proteção (STO) (L) Parada de emergência (L) Batente de proteção (L) Velocidade reduzida (L) Interruptor de ativação de 3 posições (L a H e H) Interruptor de ativação da orientação manual (L a H e H) Término do HGC e retomada da tarefa (L a H) Parada de proteção (Redefinição e retomada automáticas) (L) Ativação dinâmica da zona segura (H) Modo de controle remoto (H) Parada de emergência (sem loopback) (L) Erro ao redefinir e retomar (L a H) Redefinição do intertravamento (L a H) Batente de proteção (SS1) (L) Batente de proteção (SS2) (L) Ativação dinâmica da zona segura (L) |
|
4 |
Selecione se deseja ignorar o sinal dependendo do estado do robô |
Se você selecionar o sinal "Protective Stop" (Parada de proteção), poderá definir se o sinal selecionado será ignorado nos estados do robô "MANUAL, RECUPERAÇÃO, HGC". |
|
5 |
Defina a taxa de desaceleração |
Você pode definir a taxa de desaceleração. Pode ser de 0 a 100. |
|
6 |
Salvar |
Este botão permite salvar a configuração inserida. |
Saída
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Entrada/Saída |
Qualquer Entrada/Saída pode ser selecionada para ser definida. |
|
3 |
Configuração do sinal |
Opções definidas para cada porta.
Não usado Torque seguro desligado (STO) (L) Parada de operação segura (SOS) (L) Status da velocidade normal (L) Status de velocidade reduzida (L) Modo Automático (L) Modo manual (L) Zona autônoma (L) Zona colaborativa (L) Zona de alta prioridade (L) Zona limitada de orientação da ferramenta (L) Parada de emergência (L) Parada de emergência (exceto sem entrada de loopback) (L) Zona designada (L) Modo remoto (L) Redefinição de intertravamento necessária (L) Status da guia manual (L) |
|
4 |
Salvar |
Este botão permite salvar a configuração inserida. |
Configurações dos modos de parada de segurança
Aprenda os tipos de paradas de segurança e como engatar/desengatar a parada de segurança.
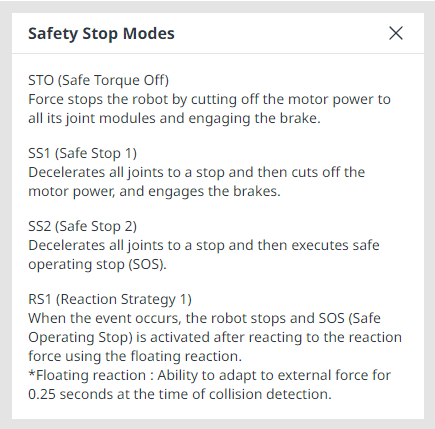
Tipos de paradas de segurança
Os modos de parada fornecidos para garantir a segurança do usuário são os seguintes:
-
STO (torque seguro desligado): Interrompe o Servo desligado (a energia do motor é desligada imediatamente)
-
SS1 (Parada segura 1): Servo desligado após parada de desaceleração máxima
-
SS2 (Parada segura 2): Espera após parada de desaceleração máxima (pausa)
-
RS1: Em caso de colisão, está em conformidade com a direção oposta da colisão e, em seguida, entra em espera (só pode ser definido em Detecção de colisão/Violação de limite de força TCP)
Os robôs Doosan Robotics têm dois tipos de funções de parada de segurança. A Parada de Emergência é usada para situações gerais de emergência, e o robô pode retomar a operação com o Servo ligado depois de liberar a parada de emergência. Em caso de parada de proteção, o robô pode retomar a operação resolvendo a causa da parada de proteção e soltando a parada.
-
Parada de emergência: Ele define o modo de parada quando o botão Parada de emergência do pendente de instrução ou um dispositivo externo instalado adicionalmente é ativado
-
Ela é ativada quando o interruptor de Parada de Emergência do pendente de instrução ou aquele conectado ao terminal EM da TBSFT é pressionado.
-
Somente STO ou SS1 pode ser selecionado.
-
-
Parada de proteção: Define o modo de parada quando o equipamento de proteção conectado externamente é ativado
-
Ele é ativado quando o equipamento de proteção conectado ao terminal TBSFT PR é ativado.
-
Para obter mais informações sobre as funções de Parada de Segurança, consulte Funções de Segurança.
Como engatar/desengatar a parada de segurança
Pressione o botão Parada de emergência no pendente de instrução ou ative o dispositivo de segurança conectado à E/S de segurança para ativar a parada de emergência. Os dispositivos de segurança podem ser conectados à Parada de emergência ou à Parada de proteção por meio de Parâmetros do robô > Configurações de segurança > Funções de E/S de segurança da tela do pendente de instrução.
-
Para obter mais informações sobre como conectar um dispositivo de segurança à E/S de segurança, consulte Conectar E/S do Controlador.
-
Para obter informações sobre como definir a função de parada de segurança para essa conexão no programa, consulte E/S de sinal de segurança.
Unknown Attachment
Menu
|
Itens |
Descrição |
|
|---|---|---|
|
1 |
Botão de alternância Bloquear |
Usado para bloquear o valor definido. A senha de segurança é necessária para modificar o valor definido. |
|
2 |
Mensagem informativa |
Uma mensagem fornecendo as informações necessárias para a configuração. |
|
3 |
Redefinir |
Um botão para redefinir as configurações. |
|
4 |
Parada de emergência |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO SS1 |
|
5 |
Batente de proteção |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: SS1 SS2 |
|
6 |
Violação do limite do ângulo da articulação |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO SS1 SS2 |
|
7 |
Violação do limite de velocidade da articulação |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
8 |
Violação do limite de torque da junta |
Somente STO está disponível. |
|
9 |
Detecção de colisão |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 RS1 |
|
10 |
Violação do limite de posição do robô TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO SS1 SS2 |
|
11 |
Violação do limite de orientação TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
12 |
Violação do limite de velocidade TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. O menu suspenso inclui o seguinte: STO (exceto para a série H/P) SS1 SS2 |
|
13 |
Violação do limite de força TCP |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
14 |
Violação do limite de momentum |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
15 |
Violação do limite mecânico |
Uma Parada de segurança pode ser selecionada para ser usada para o item correspondente. Os menus suspensos incluem: STO (exceto para a série H/P) SS1 SS2 |
|
16 |
Salvar |
Este botão permite salvar os valores de configuração. |
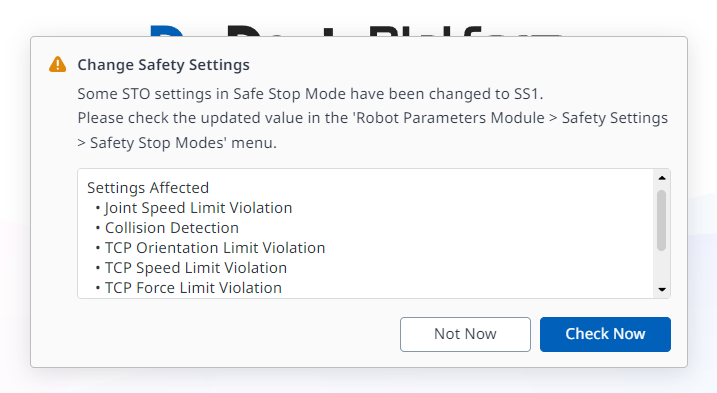
Observação
A seguinte janela pop-up aparece na mensagem informativa:
Observação
A partir da versão 3,2.2, algumas configurações de STO nos modos de Parada de Segurança do modelo H foram alteradas para SS1.
Se os valores em uso tiverem sido atualizados, o pop-up a seguir será exibido.