-
A distância de parada é o ângulo percorrido desde o momento em que um sinal de parada é gerado até o momento em que toda a operação do manipulador para.
-
O tempo de parada é o tempo desde o momento em que um sinal de parada é gerado até o momento em que todo o manipulador interrompe a operação.
-
Os dados de distância de parada e tempo de parada são fornecidos para as articulações 1, 2 e 3, que têm grandes distâncias de percurso.
-
O movimento de um eixo sobreposto pode causar uma distância de parada mais longa.
-
Os dados de distância de parada e tempo de parada são definidos de acordo com a Declaração e Certificação KS B ISO 10218-1:2011.
Parar categoria
|
Parar categoria |
Descrição |
|
|---|---|---|
|
1 |
Parar Categoria 0 |
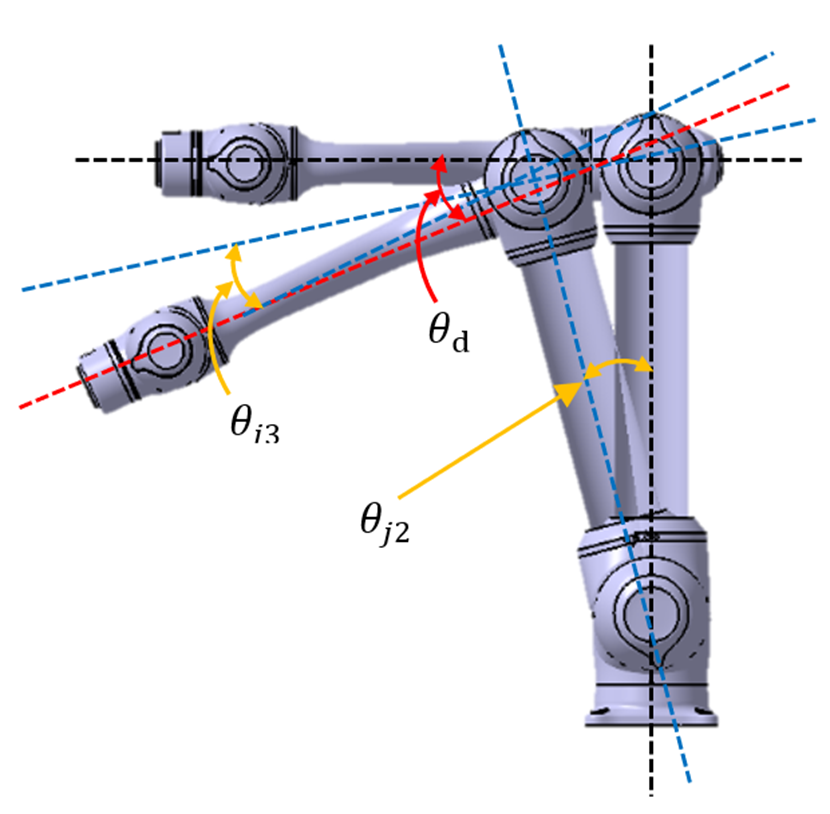
A distância de parada e o tempo de parada da Articulação 1 (Base), Articulação 2 (Ombro) e Articulação 3 (Cotovelo) são medidos na velocidade máxima, no nível de alongamento e na carga. Os eixos da Junta 2 e da Junta 3 são paralelos um ao outro, portanto, um impacto causado pela parada forçada em uma peça pode causar um deslizamento no outro lado. O desvio do ângulo também é medido. |
|
2 |
Parar Categoria 1 |
A distância de parada e o tempo de parada da articulação 1 (base) e da articulação 2 (ombro) são medidos a 33%, 66% e 100% da velocidade máxima, nível de alongamento e carga, respectivamente. A distância de parada e o tempo de parada da Junta 3 (cotovelo) são medidos a 33%, 66% e 100% da velocidade e da carga máximas. O nível de alongamento durante a medição da articulação 3 é bloqueado no máximo devido ao comprimento do braço inferior e ao pulso completamente plano. |
Posições e condições de medição
A medição da junta 1 é realizada com o eixo de rotação perpendicular ao solo e durante o movimento horizontal.
As medições da Junta 2 e da Junta 3 são realizadas com o eixo de rotação paralelo ao solo e quando o robô é parado em um movimento descendente vertical em relação ao solo.
Observação
As medições são o resultado do pior caso. A medição pode variar de acordo com as circunstâncias
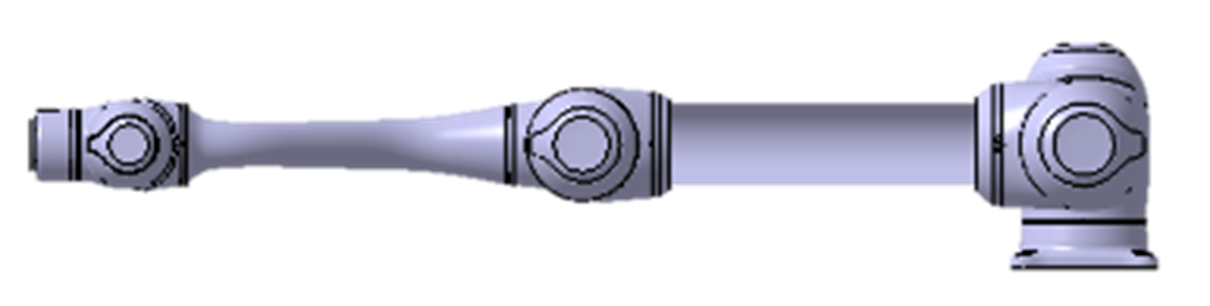
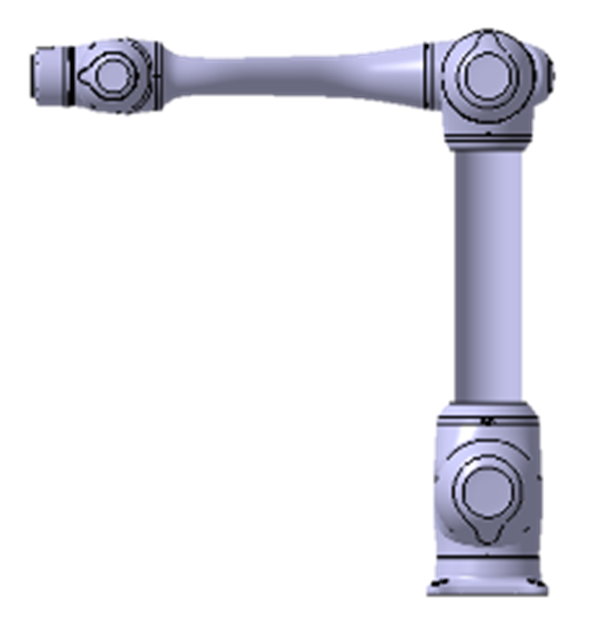
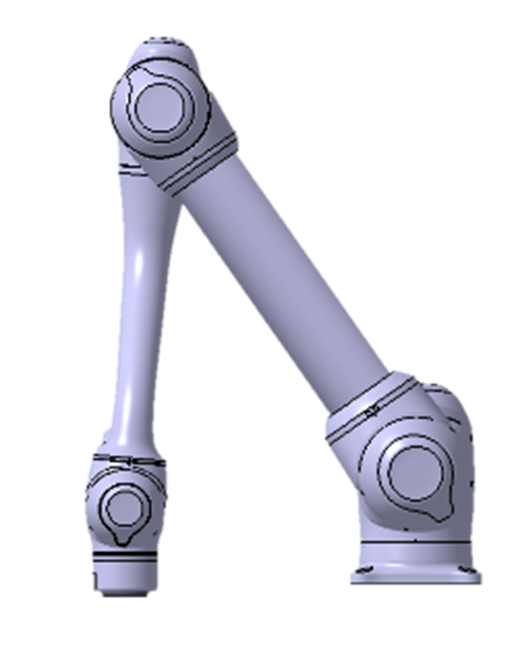
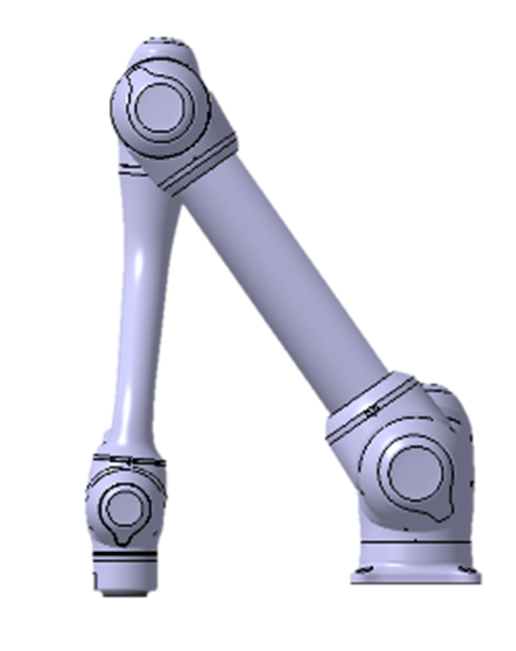
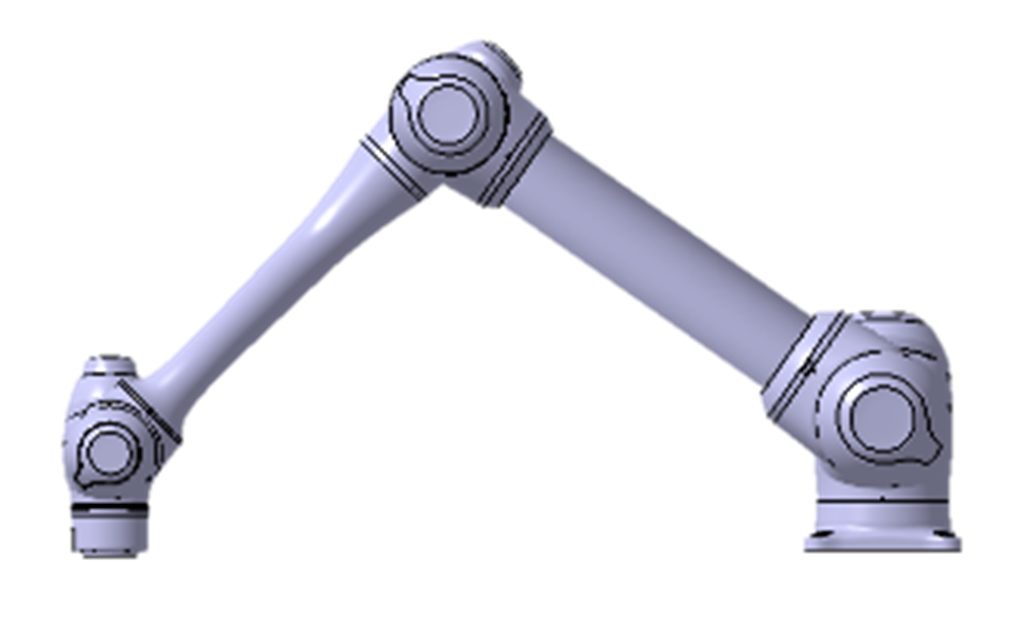
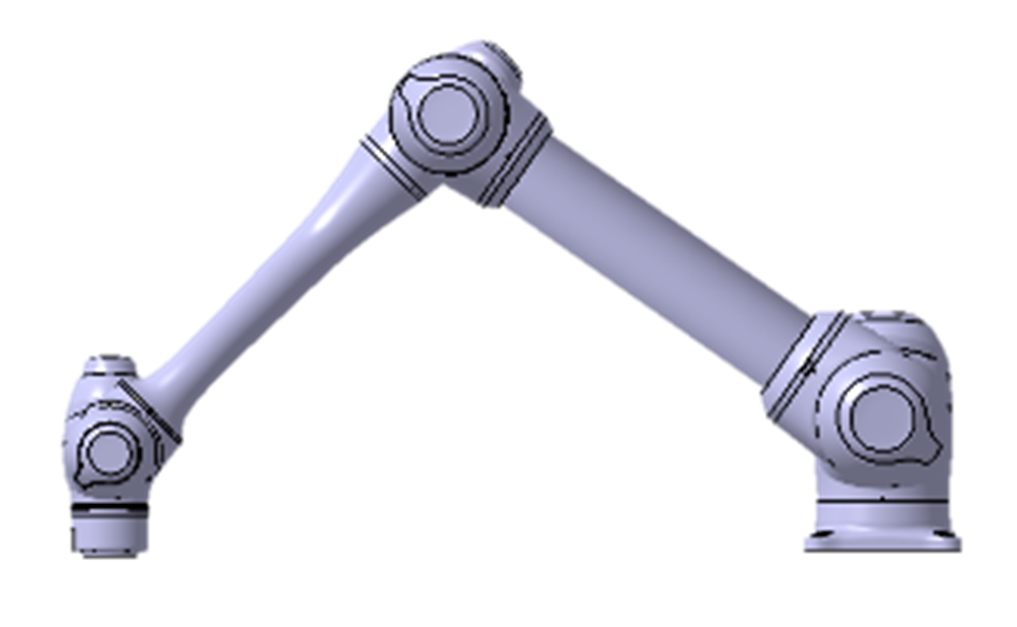
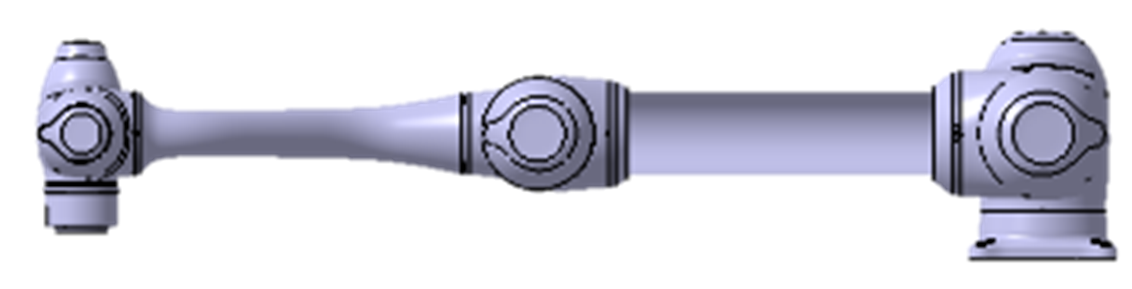
A pose para 33%, 66% e 100% de extensão
|
|
Junta 1 |
Junta 2 |
Junta 3 |
|
extensão de 100% Categoria de parada 0 |
|
|
|
|
extensão de 33% Categoria de parada 1 |
|
|
- |
|
extensão de 66% Categoria de parada 1 |
|
|
- |
|
extensão de 100% Categoria de parada 1 |
|

|
|
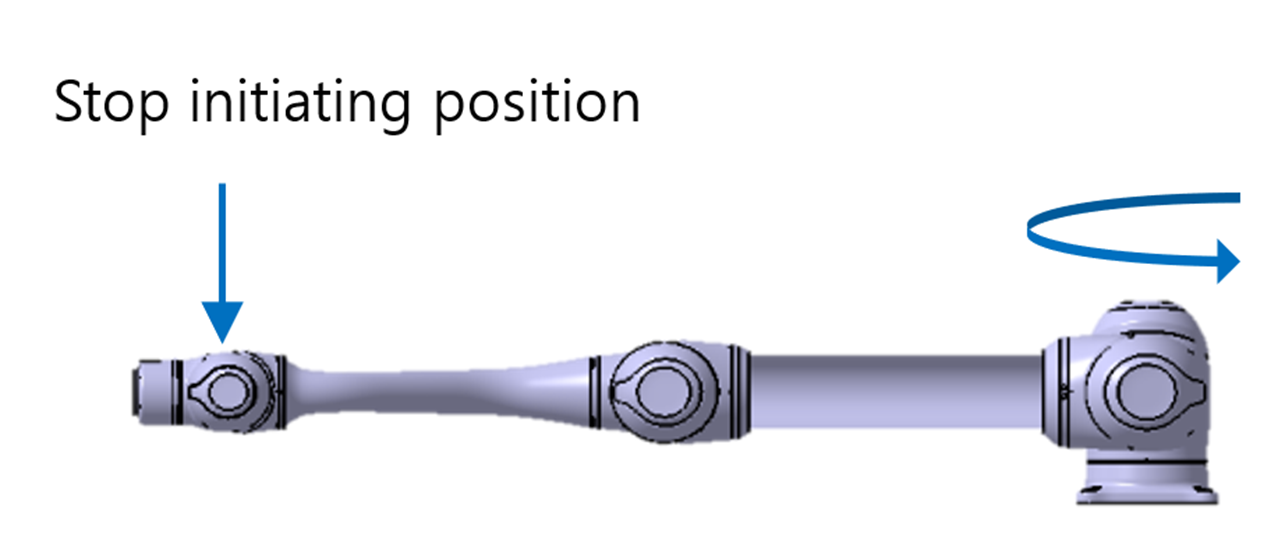
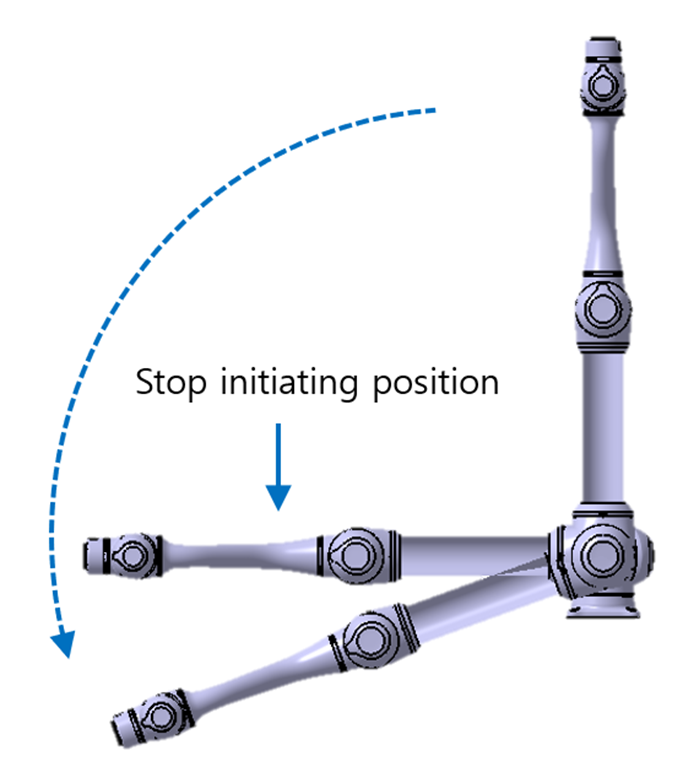
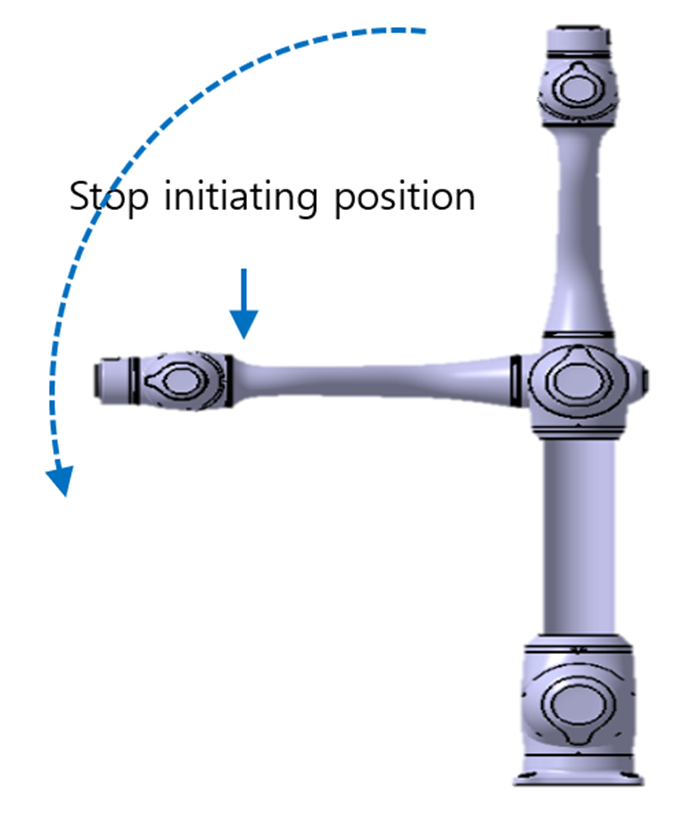
A posição quando a parada é iniciada e o ângulo medido (θd)
|
|
Pose quando a parada for iniciada |
Ângulo medido |
|
JOINT1
|
|
Sem deslizamento, |
|
Junto2 |
|

|
|
JOINT3 |
|
|