Sub est une abréviation de Subroutine. Un sous-programme fait référence à un processus qui minimise le nombre d'étapes dans un programme en appelant les parties nécessaires lorsque deux parties dupliquées ou plus sont présentes.
-
Les robots Doosan Robotics fournissent une commande CallSub pour appeler les commandes Sub et le sous-paragraphe correspondant.
-
La commande Sub fonctionne comme défini en Python.
Remarque
-
Le sous-paragraphe doit être ajouté dans MainSub, au début d'un paragraphe principal, et EndMainSub, à la fin d'un paragraphe principal.
-
En plus de la répétition, la commande Sub est également utilisée pour simplifier un paragraphe principal. L'utilisation d'une sous-commande permet d'identifier de manière intuitive la tâche d'un paragraphe principal en cours d'exécution.
-
L'utilisation d'une commande sous-paragraphe permet de tester les unités de sous-paragraphe.
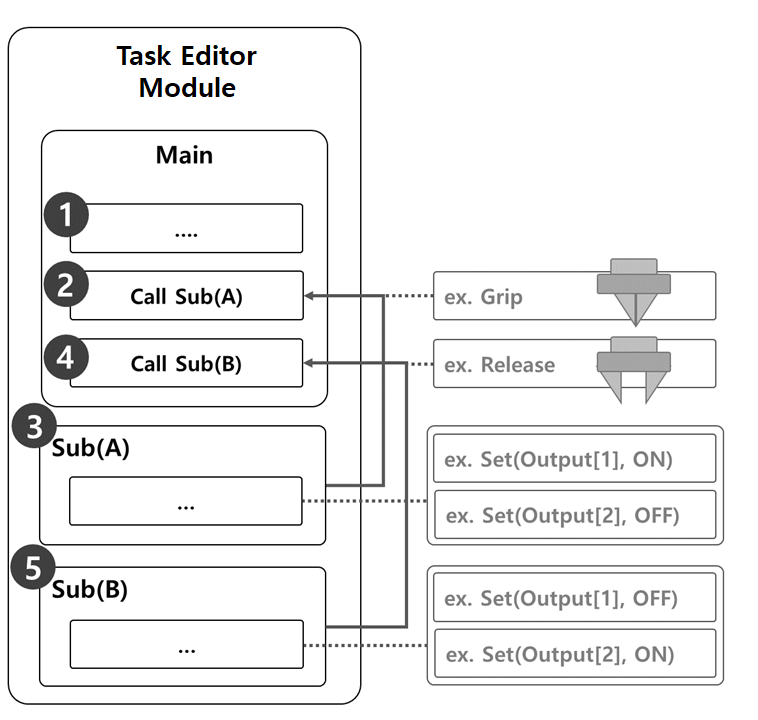
L'exemple dans lequel une sous-commande est utilisée pour exécuter les mouvements de préhension et de relâchement d'un préhenseur de robot comprend les éléments suivants.
-
Les lignes du paragraphe principal exécutent le programme de tâches dans l'ordre séquentiel à partir de la première ligne.
-
Déplacer vers Sub(A) appelé par Call Sub.
-
Échantillon
-
Programme : Appelez la sous-routine Grip.
-
Robot : Pas de mouvement
-
-
-
Sub(A) est exécuté. Toutes les lignes de sous-paragraphe sont exécutées dans l'ordre séquentiel, retourne au paragraphe principal et exécute la ligne suivante.
-
Échantillon
-
Programme : Exécutez les lignes du sous-programme Grip dans l'ordre séquentiel. Utilisez la commande set pour définir la sortie [1] sur ON et la sortie [2] sur OFF.
-
Robot : La pince robot exécute le mouvement Grip.
-
-
-
Déplacer vers Sub(B) appelé par Call Sub.
-
Échantillon
-
Programme : Appelez la sous-routine Release.
-
Robot : Pas de mouvement
-
-
-
Sub(B) est exécuté. Toutes les lignes de sous-paragraphe sont exécutées dans l'ordre séquentiel, retourne au paragraphe principal et exécute la ligne suivante.
-
Échantillon
-
Programme : Exécutez les lignes du sous-programme Grip dans l'ordre séquentiel. Utilisez la commande set pour définir la sortie [1] sur OFF et la sortie [2] sur ON.
-
Robot : La pince du robot exécute le mouvement de libération.
-
-
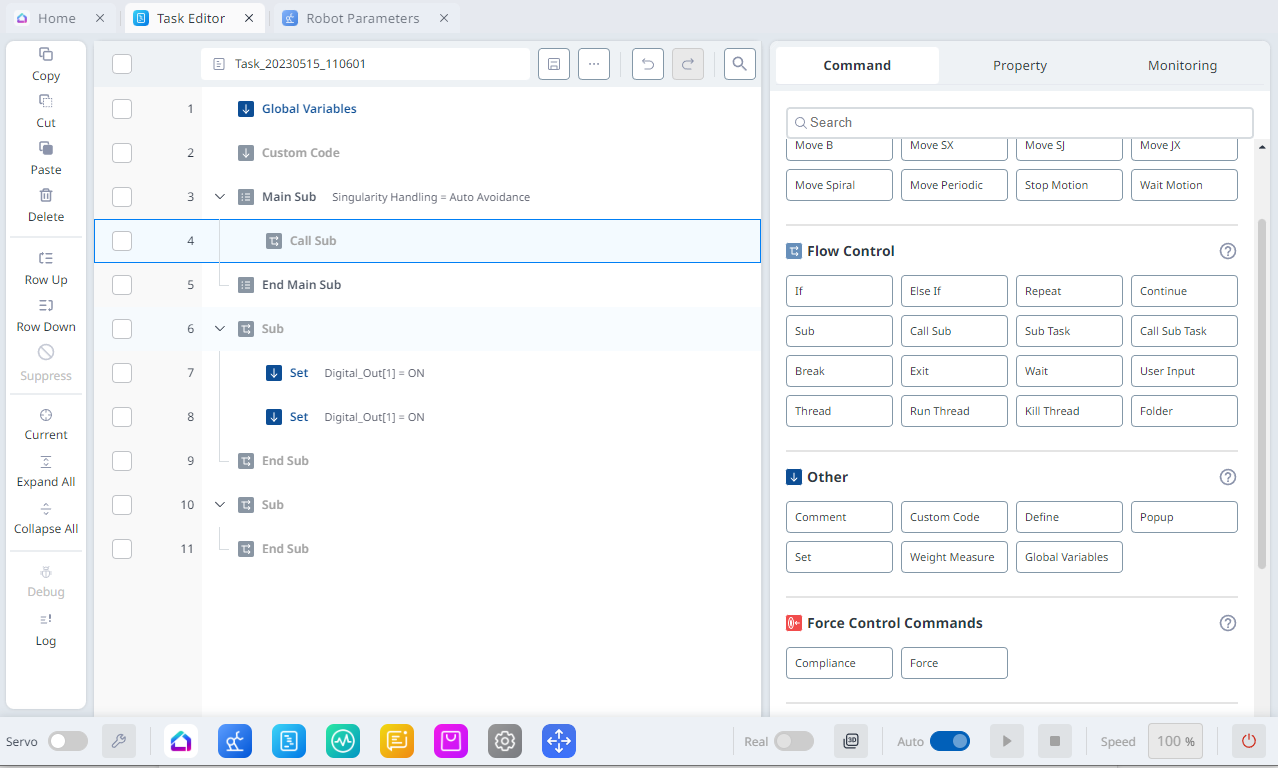
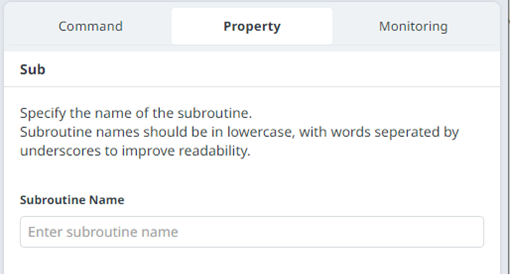
Ajouter une sous-commande
-
Dans le module Editeur de tâches, dans la section contrôle de flux du menu commande de droite, ajoutez une sous-commande.
-
Entrez le nom de la sous-routine.
Ajouter CallSub, commande
-
Dans le module Editeur de tâches, dans la section contrôle de flux du menu commande de droite, ajoutez une sous-commande appeler.
-
Sélectionnez le nom de sous-programme enregistré avec la commande Sub.
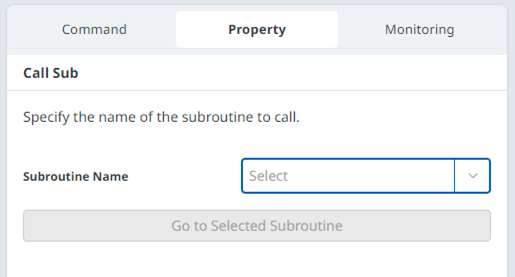
Remarque
-
Si le nombre de lignes augmente dans le programme de tâches, il peut devenir difficile de trouver des sous-programmes. Dans ce cas, appuyez sur aller à la sous-routine sélectionnée dans la commande propriété de CallSub pour déplacer le focus vers la ligne de commande Sub correspondante.