Feature
-
Launch the robot model on Rviz simulator and load Joint_state_publisher.
-
The robot can be moved by using Joint_state_publisher.
Parameter
|
Parameter
|
Data Type |
Default
|
Description |
|---|---|---|---|
|
model |
- |
m1013 |
M-Series Robot model . m0609, m0617, m1013, m1509 A-Series Robot model . a0509 |
|
color |
- |
white |
Robot Color . white or blue |
|
gripper |
- |
none |
using gripper or not . none : not use gripper . robotiq_2f : use robotiq 2finger gripper |
Example
Bash
$ roslaunch dsr_description m0609.launch
$ roslaunch dsr_description m1013.launch color:=blue # Change Color
$ roslaunch dsr_description m1509.launch gripper:=robotiq_2f # insert robotiq gripper
$ roslaunch dsr_description m0617.launch color:=blue gripper:=robotiq_2f
$ roslaunch dsr_description a0509.launch # A-Series
Robot and Joint_state_publisher are loaded on Rviz simulator (Figure 3.1). The robot can be moved by using Joint_state_publisher.
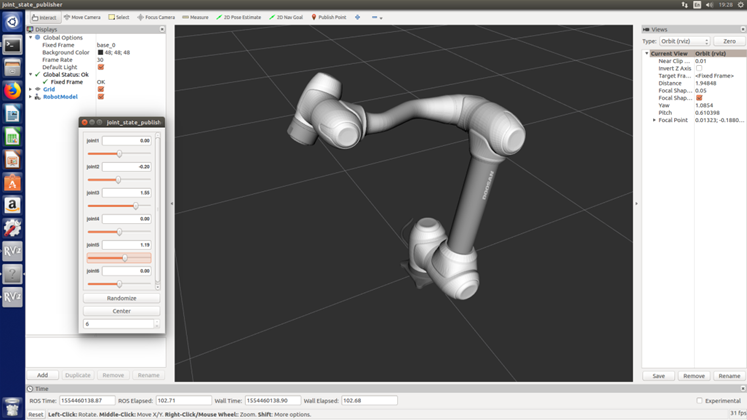
Figure 3.1 Robot on the Rviz simulator