Features
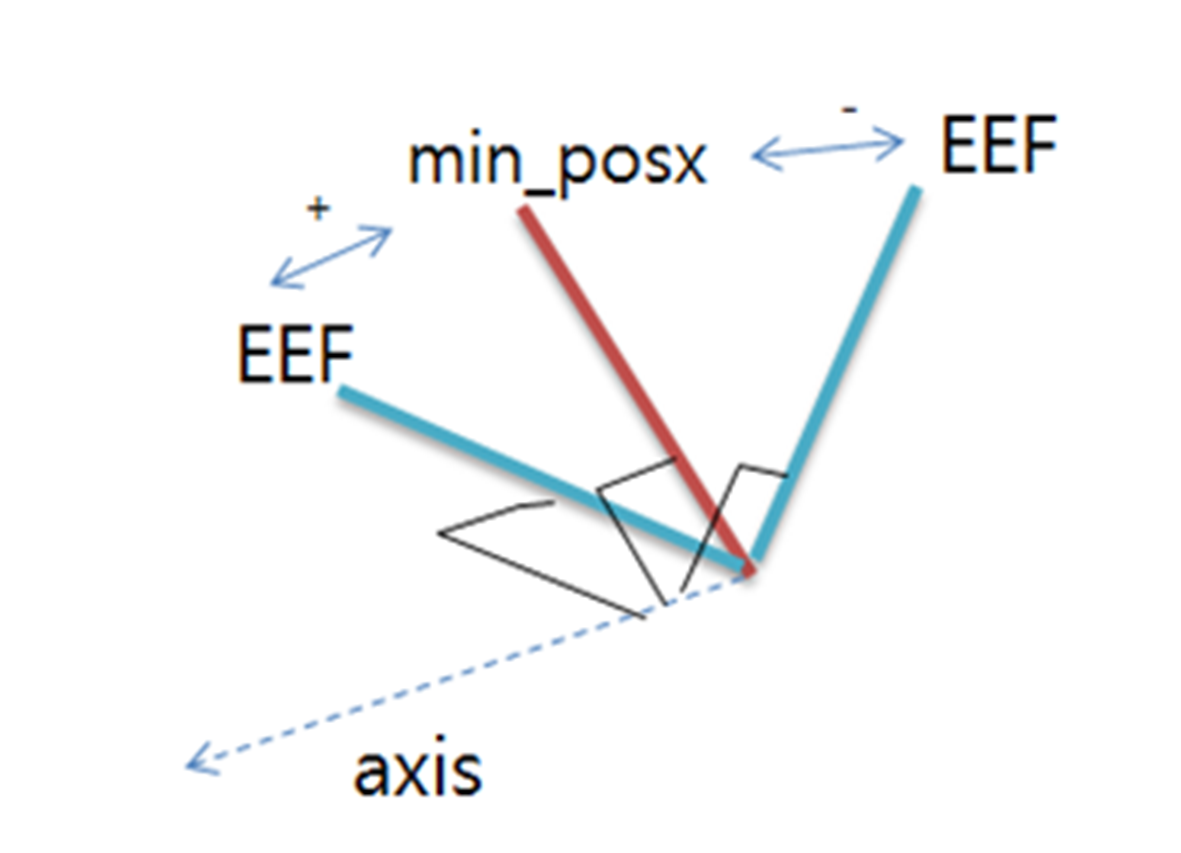
This service checks the difference between the current pose and the specified pose of the robot end effector. It returns the difference between the current pose and the specified pose in rad with the algorithm that transforms it to a rotation matrix using the “AngleAxis” technique. It returns True if the difference is positive (+) and False if the difference is negative (-). It is used to check if the difference between the current pose and the rotating angle range is + or -. For example, the function can use the direct teaching position to check if the difference from the current position is + or - and then create the condition for the orientation limit. This condition can be repeated with the while or if statement.
-
Setting Min only: True if the difference is + and False if -
-
Setting Min and Max: True if the difference from min is - while the difference from max is + and False otherwise
-
Setting Max only: True if the maximum difference is + and False otherwise
Parameters
|
Parameter Name |
Data Type |
Default Value |
Description |
|---|---|---|---|
|
axis |
int8 |
- |
FORCE_AXIS_A = 10 FORCE_AXIS_B = 11 FORCE_AXIS_C = 12 |
|
min |
float64[6] |
- |
position list |
|
max |
float64[6] |
- |
position list |
|
ref |
int8 |
1 |
MOVE_REFERENCE_BASE =0 MOVE_REFERENCE_TOOL=1 MOVE_REFERENCE_WORLD=2 MOVE_REFERENCE_USER=101~120 |
|
mod |
int8 |
0 |
MOVE_MODE_ABSOLUTE = 0 MOVE_MODE_RELATIVE = 1 |
Return
|
Return Name |
Data Type |
Default Value |
Description |
|---|---|---|---|
|
success |
bool |
- |
True or False |