Feature
-
Launch the robot model on Rviz simulator and operated by MoveIt.
-
Working by connecting with emulator mode or real robot.
-
The emulator mode only works in virtual mode.
Parameter
|
Paramater
|
Paramater
|
Default
|
Description |
|---|---|---|---|
|
host |
- |
127.0.0.1 |
Robot Controller IP . Emulator : 127.0.0.1 . Real robot controller : 192.168.127.100 |
|
Port |
- |
12345 |
port |
|
mode |
- |
virtual |
Robot operation mode - virtual : virtual mode - real : real mode |
|
model |
- |
m1013 |
M-Series Robot model . m0609, m0617, m1013, m1509 A-Series Robot model . a0509 |
|
color |
- |
white |
Robot color . white or blue |
|
gripper |
- |
none |
using gripper or not . none : not use gripper . robotiq_2f : use robotiq 2finger gripper |
Example
<virtual mode>
$ roslaunch dsr_control dsr_moveit.launch model:=m0609 mode:=virtual
$ roslaunch dsr_control dsr_moveit.launch model:=m0617
$ roslaunch dsr_control dsr_moveit.launch model:=m1013 mode:=virtual color:=blue
<real mode>
Robot controller IP defalut = 192.168.127.100, port = 12345
$ roslaunch dsr_control dsr_moveit.launch model:=m1509 host:=192.168.127.100 mode:=real color:=blue gripper:=robotiq_2f
$ roslaunch dsr_control dsr_moveit.launch model:=a0509 host:=192.168.127.100 mode:=real
The Robot and Motion Planning Interface window are loaded on Rviz(Figure 4.2).
The MotionPlanning allows the robot to run in real environment.
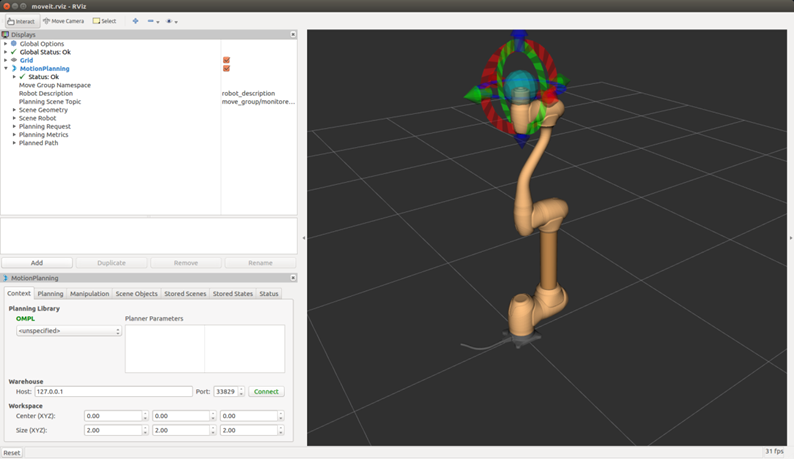
Figure 4.2 Rviz + dsr_control