コンポーネントリスト
|
|
|
マニピュレータ |
コントローラ(オプション:付録を参照) |
|
|
|
ティーチペンダント |
コントローラ電源ケーブル |
|
|
|
マニピュレータ接続ケーブル |
ユーザーマニュアル/クイックガイド |
各部品と機能の名称
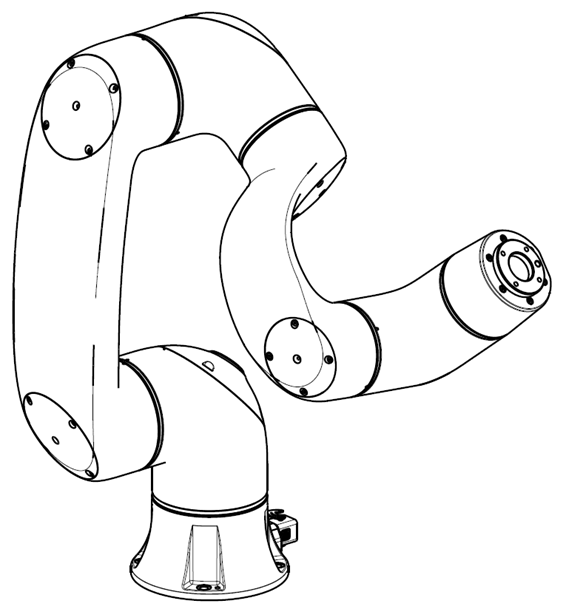
マニピュレータ
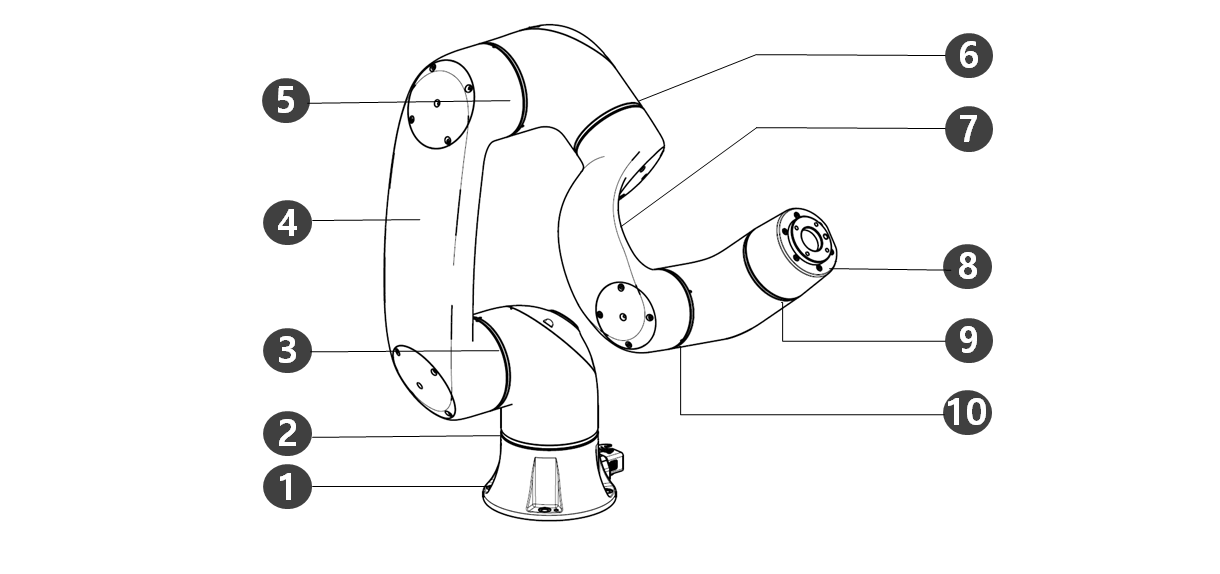
各部品の名称
|
いいえ。 |
名称 |
いいえ。 |
名称 |
|---|---|---|---|
|
1 |
ベース |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
ツールフランジ |
|
4 |
リンク1 |
9 |
J5 |
|
5 |
J3 |
10 |
J6 |
論
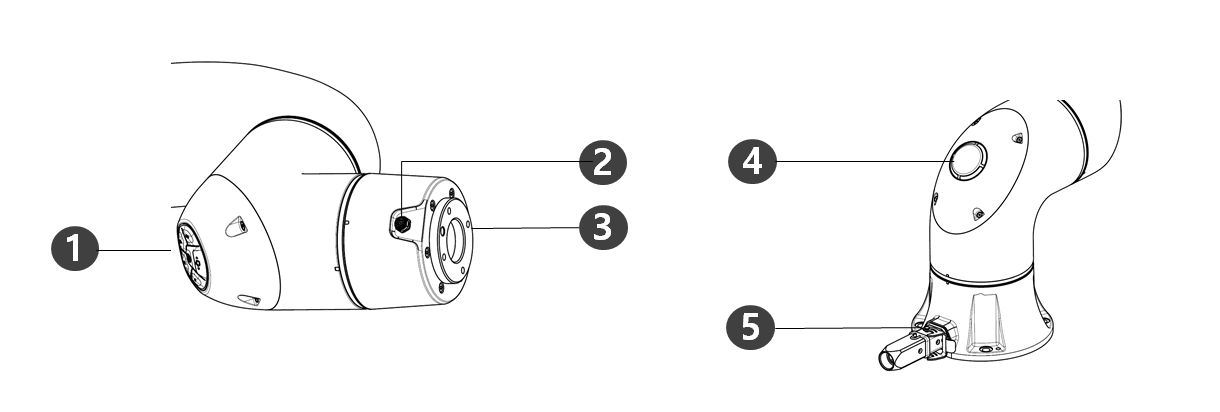
主な機能
|
いいえ。 |
項目s |
概要 |
|---|---|---|
|
1 |
コックピット |
[オプション]ダイレクトティーチングに使用するコントローラー。 |
|
2 |
フランジI/O |
ツール制御用のI/Oポート。 |
|
3 |
ツールフランジ |
工具を取り付けるための領域。 |
|
4 |
LED |
異なる色でロボットの状態を表示する。ロボットの状態の詳細については、 各モードの状態とフランジLEDの色を参照のこと。. |
|
5 |
コネクタ |
ロボットへの電力供給および通信に使用する。 |
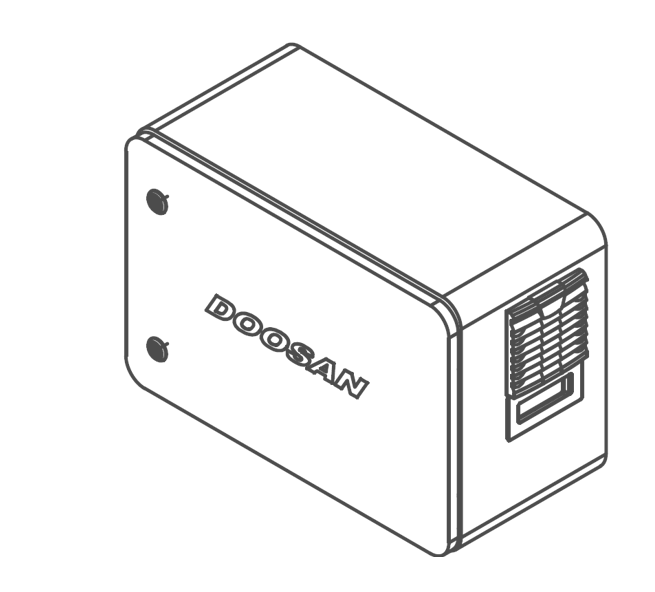
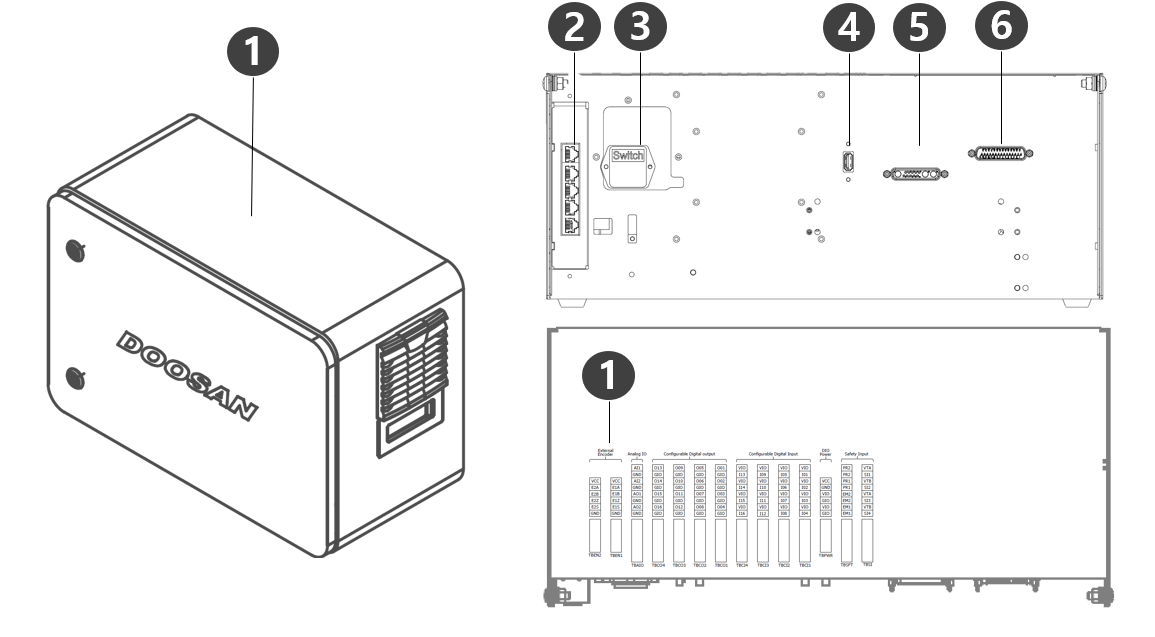
コントローラー
|
いいえ。 |
項目s |
概要 |
|---|---|---|
|
1 |
I/O接続端子(内部) |
他のロボットのコントローラや周辺機器と接続可能。 |
|
2 |
ネットワーク接続ターミナル |
ラップトップ、TCP/IPデバイス、およびModbus機器を使用するために、コントローラ内のネットワーク接続端末に接続するために使用する。 初期セットアップ時に、ネットワーク接続端子の右側にあるLANケーブルのRJ45コネクタを端末に接続する必要がある。 |
|
3 |
電源接続端子/スイッチ |
コントローラの主電源を接続してオンまたはオフにするために使用する。 詳細については、「 システムの電源オン/オフ」を参照。. |
|
4 |
USB接続端子 |
ロボットがUSBストレージで動作している間に作成されたログを保存するか、タスクをエクスポートおよびインポートするために使用される。 |
|
5 |
マニピュレータケーブル接続端子 |
マニピュレータケーブルをコントローラに接続するために使用する。 |
|
6 |
ティーチペンダントケーブル接続端子 |
ティーチペンダントケーブルをコントローラに接続するために使用する。 |
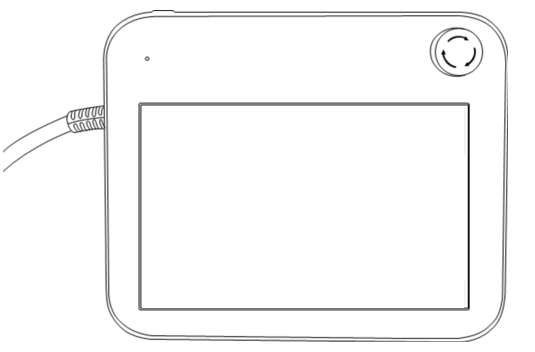
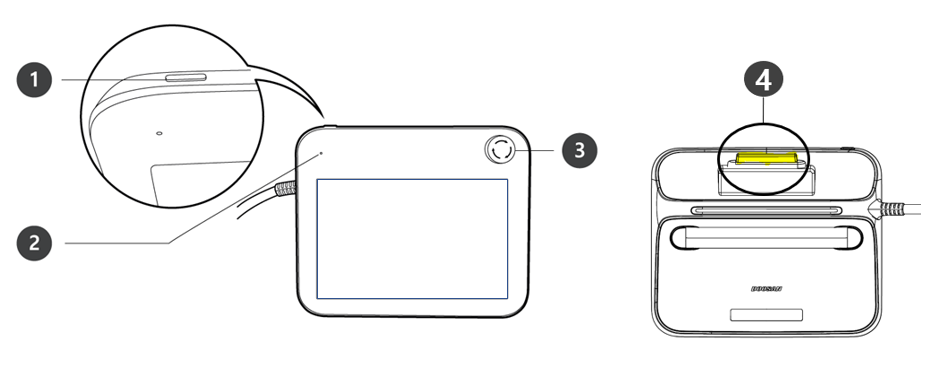
ティーチペンダント
|
いいえ。 |
項目s |
概要 |
|---|---|---|
|
1 |
電源ボタン |
|
|
2 |
電源LED |
|
|
3 |
緊急停止ボタン |
|
|
4 |
ハンドガイドボタン(3PE 3ポジションイネーブルスイッチ) |
|
注釈
-
ティーチペンダントを運転中に保護して取り付ける必要がある場合は、当社が提供するソフトカバーにより、より安全で使いやすい。
-
新しいTP(TP-02)追加機能:ハンドガイドデュアル機能
-
既存のTP(TP-01)を内蔵コントローラで使用できない。(3PEスイッチによりピンマップが変更)
-
新しいTP(TP-02)は既存のコントローラでも使用できるが、LEDが単色(赤)に変わり表示され、追加機能は使用できない。
-
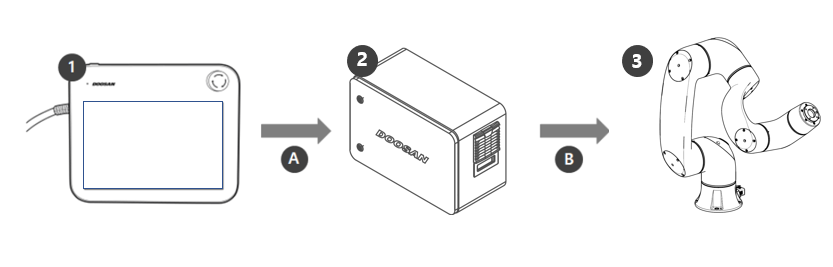
システム構成
|
いいえ。 |
名称 |
概要 |
|---|---|---|
|
1 |
ティーチペンダント |
この装置はシステム全体を管理し、ロボットに特定のポーズを教えたり、マニピュレータやコントローラに関連する設定を行うことができる。 |
|
2 |
コントローラー |
ティーチペンダントで設定されたポーズや動きに応じてロボットの動きを制御する。様々なI/Oポートを備えており、様々な機器やデバイスの接続や使用が可能である。 |
|
3 |
マニピュレータ |
様々なツールを使って輸送や組み立て作業を行うことができる産業用協働ロボットである。 |
|
A |
コマンド/監視 |
|
|
B |
電源/ネットワーク |
|