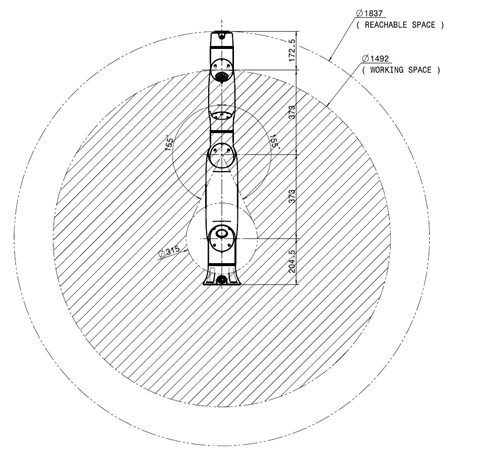
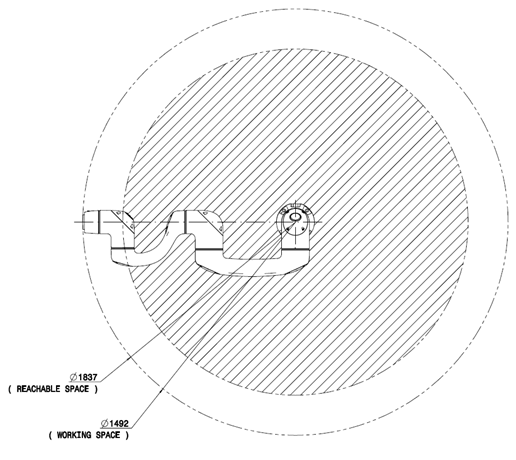
ロボット操作スペース
E0509
|
|
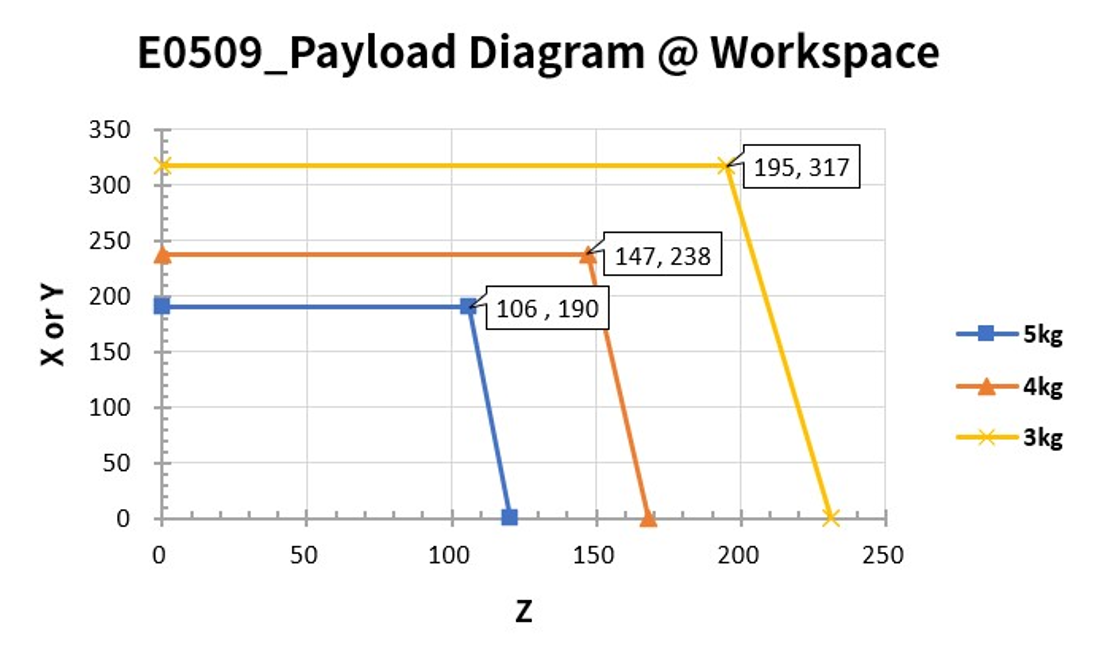
最大 運用スペース内のペイロード
ロボットの動作空間内の最大ペイロードは、重心からの距離によって変化する。距離あたりのペイロードは次のとおりである。
注釈
この荷重図では、工具の荷重量が小さいことを想定している。体積が大きい工具は、重量が同じで体積が小さい工具と比較して、重心より上のペイロードの制限が大きくなり、振動が発生する可能性がある。
E0509
許容されるモーメントと慣性
ロボットのJ4-J6に許容されるモーメントと慣性は次のとおりである。
|
モデル名 |
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
許可された瞬間 |
慣性 |
許可された瞬間 |
慣性 |
許可された瞬間 |
慣性 |
|
|
E0509 |
36 Nm |
1.6kg㎡ |
36 Nm |
1.6kg㎡ |
36 Nm |
1.6kg㎡ |
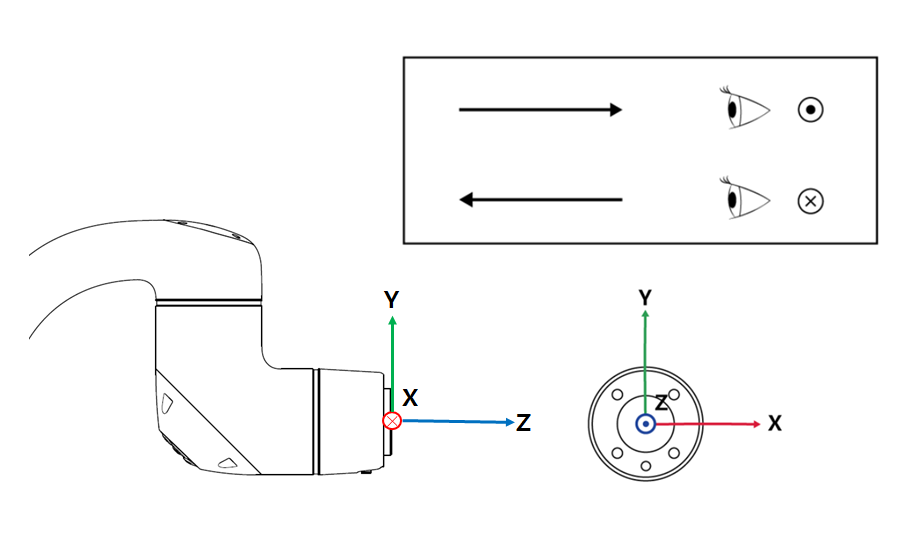
ツール中心点(TCP)
TCPについては下図を参照のこと。
基本仕様
|
モデル名 |
E0509 |
|||||
|---|---|---|---|---|---|---|
|
重量 |
22kg |
|||||
|
作業半径内のペイロード |
5kg |
|||||
|
最大 ワーク半径 |
900 mm |
|||||
|
軸の数 |
6 |
|||||
|
最大 TCP速度 |
1 m/s以上 |
|||||
|
位置の再現性(ISO 9283) |
±0.05 mm |
|||||
|
保護等級 |
IP 66 |
|||||
|
ノイズ |
60 dB未満 |
|||||
|
インストールの方向 |
任意の方向 |
|||||
|
コントローラーとペンダント |
斗山コントローラ、DARTプラットフォーム、スマートペンダント(オプション) |
|||||
|
振動と加速度 |
10≤f <℃ 57-0.075mm振幅 57≤f≤150℃ –1G |
|||||
|
インパクト |
最大振幅:50℃(5G)
|
|||||
|
動作温度 |
0 ㎐ (273K ~ 318K) |
|||||
|
保管温度 |
-5~50 ㎐ (268K~323K) |
|||||
|
湿度 |
90% RH(結露しないこと) |
|||||
軸の仕様
|
モデル名 |
E0509 |
|||
|---|---|---|---|---|
|
動作角度 |
||||
|
J1 |
±360° |
|||
|
J2 |
±360° |
|||
|
J3 |
±155° |
|||
|
J4 |
±360° |
|||
|
J5 |
±155° |
|||
|
J6 |
±360° |
|||
|
最大 軸あたりの速度(定格ペイロード動作) |
||||
|
J1 |
120/s °/s |
|||
|
J2 |
120/s °/s |
|||
|
J3 |
150 °回/秒 |
|||
|
J4 |
225 °/秒 |
|||
|
J5 |
225 °/秒 |
|||
|
J6 |
225 °/秒 |
|||