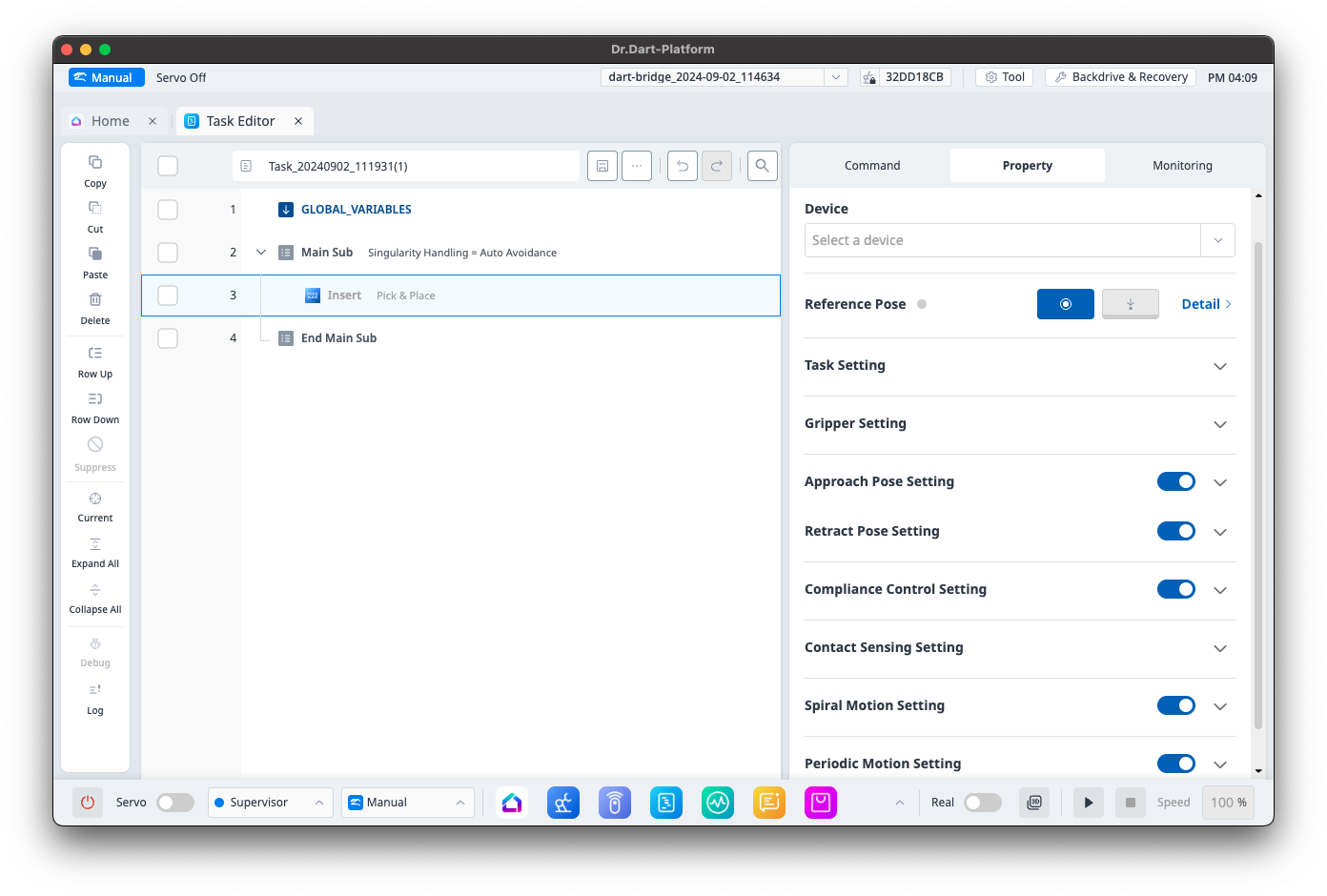
Insert
항목
|
기능
|
|
|---|---|---|
|
1 |
기계 |
디바이스를 선택할 수 있습니다. |
|
2 |
기준 자세 |
기준 자세를 설정할 수 있습니다. |
|
3 |
태스크 설정 |
구멍 깊이, 삽입 속도 및 가속도, 태스크 속도 및 가속도를 설정할 수 있습니다. |
|
4 |
그리퍼 설정 |
그리퍼 정보를 설정할 수 있습니다. |
|
5 |
접근 자세 설정 |
접근 거리, 속도, 가속도, 모션 시간을 설정할 수 있습니다. |
|
6 |
후퇴 자세 설정 |
후퇴 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
7 |
강성 제어 설정 |
강도를 설정할 수 있습니다. |
|
8 |
접촉 감지 설정 |
태스크 방향, 접촉 마진, 원하는 힘, 접촉 힘, 시간 초과를 설정할 수 있습니다. |
|
9 |
나선 모션 설정 |
나선 간격, 최대 반경, 속도, 가속도를 설정할 수 있습니다. |
|
10 |
주기 모션 설정 |
최대 각도, 최대 주기, 최대 반복 횟수를 설정할 수 있습니다. |
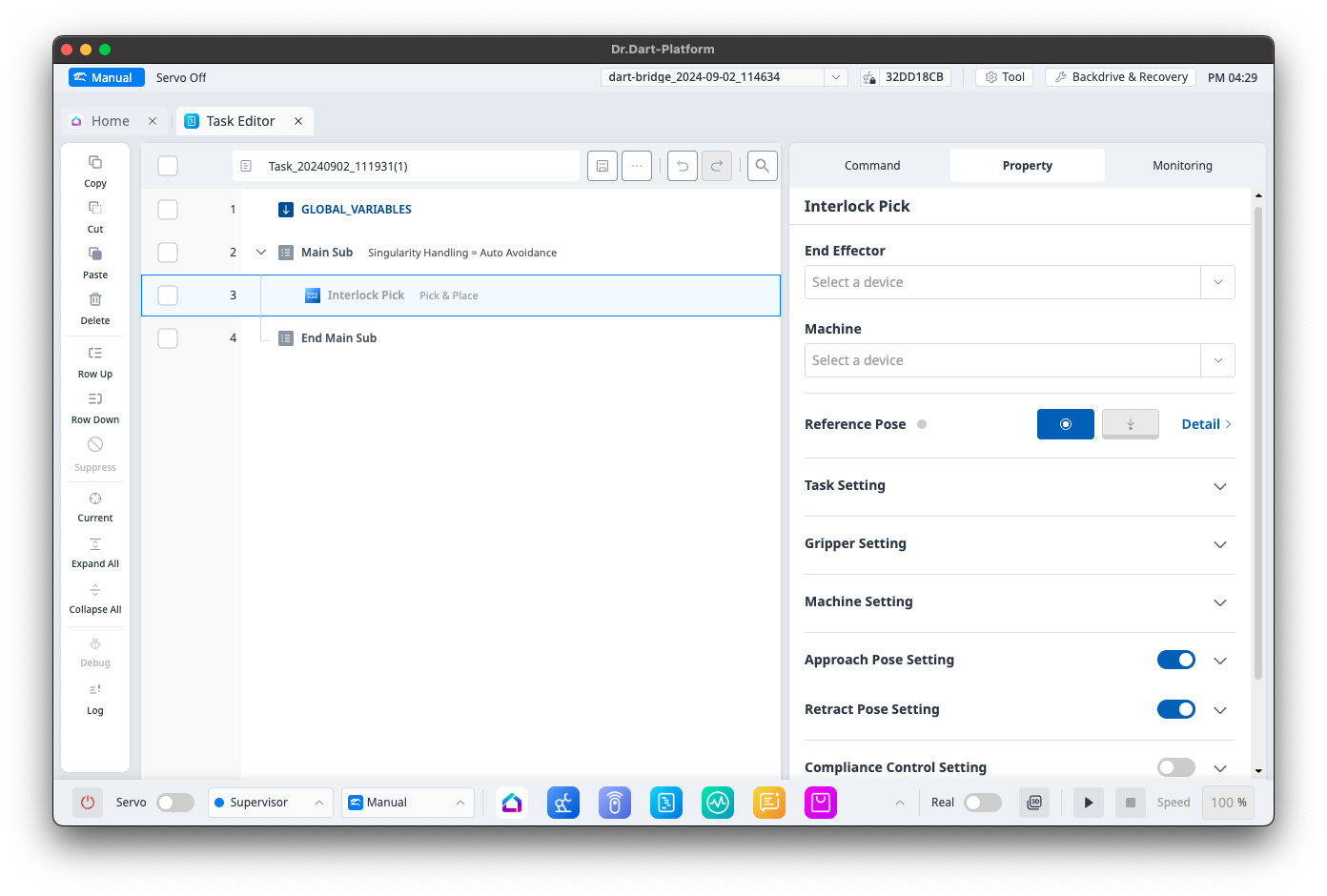
Interlock Pick
항목
|
기능
|
|
|---|---|---|
|
1 |
엔드 이펙터 |
디바이스를 설정할 수 있습니다. |
|
2 |
기계 |
기계를 설정할 수 있습니다. |
|
3 |
기준 자세 |
기준 자세를 설정할 수 있습니다. |
|
4 |
태스크 설정 |
태스크 속도 및 가속도를 설정할 수 있습니다. |
|
5 |
그리퍼 설정 |
그리퍼 정보를 설정할 수 있습니다. |
|
6 |
기계 설정 |
기계 준비 확인, 확인 후 대기시간, 척 후 대기 시간을 설정할 수 있습니다. |
|
7 |
접근 자세 설정 |
접근 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
8 |
후퇴 자세 설정 |
후퇴 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
9 |
강성 제어 설정 |
강도를 설정할 수 있습니다. |
|
10 |
접촉 감지 설정 |
태스크 방향, 접촉 마진, 원하는 힘, 접촉 힘, 시간 초과, 오프셋 마진을 설정할 수 있습니다. |
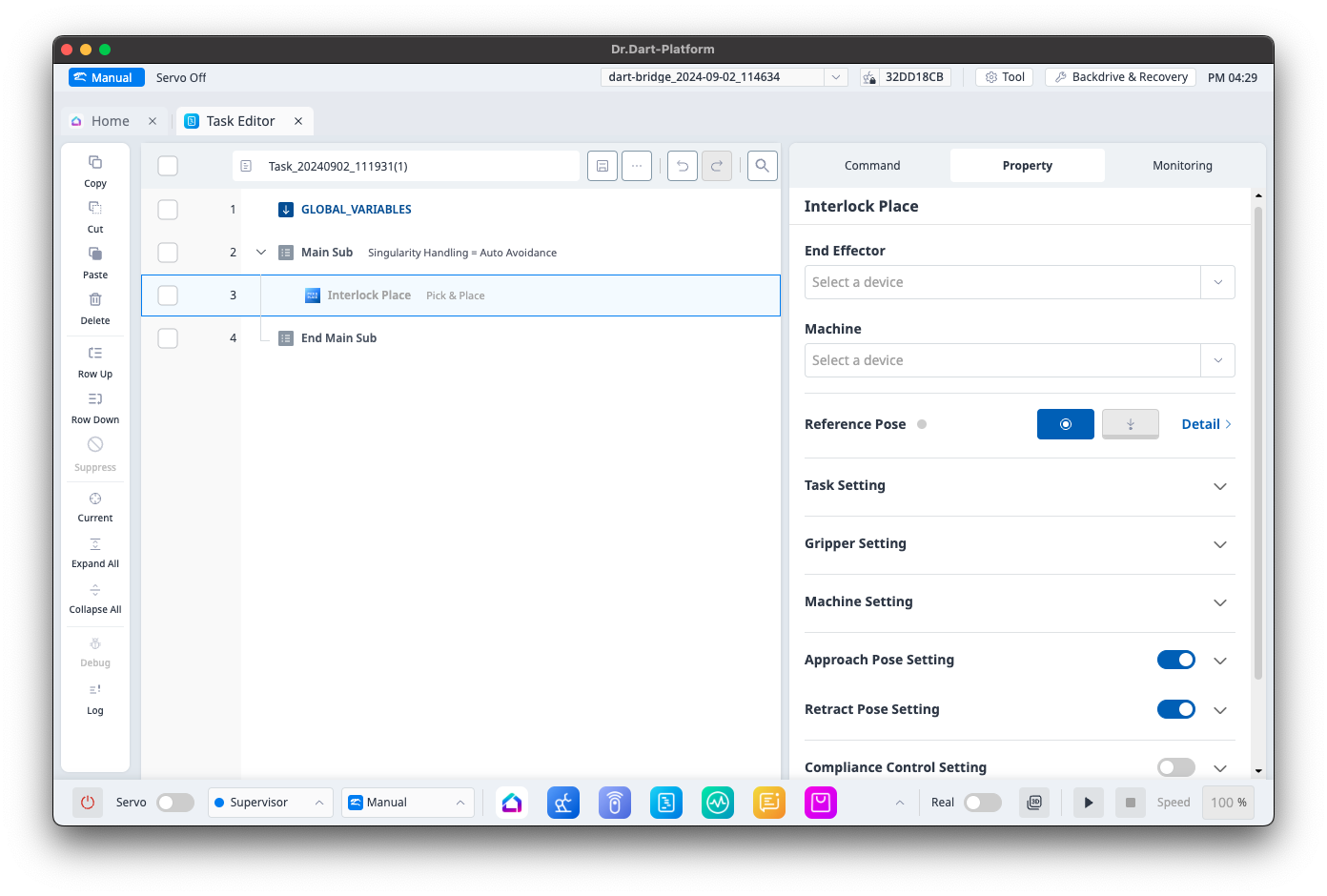
Interlock Place
항목
|
기능
|
|
|---|---|---|
|
1 |
엔드 이펙터 |
디바이스를 설정할 수 있습니다. |
|
2 |
기계 |
기계를 설정할 수 있습니다. |
|
3 |
기준 자세 |
기준 자세를 설정할 수 있습니다. |
|
4 |
태스크 설정 |
태스크 속도 및 가속도를 설정할 수 있습니다. |
|
5 |
그리퍼 설정 |
그리퍼 정보를 설정할 수 있습니다. |
|
6 |
기계 설정 |
기계 준비 확인, 확인 후 대기시간, 척 후 대기 시간, 배치 전 척 열기를 설정할 수 있습니다. |
|
7 |
접근 자세 설정 |
접근 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
8 |
후퇴 자세 설정 |
후퇴 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
9 |
강성 제어 설정 |
강도를 설정할 수 있습니다. |
|
10 |
접촉 감지 설정 |
태스크 방향, 접촉 마진, 원하는 힘, 접촉 힘, 시간 초과를 설정할 수 있습니다. |
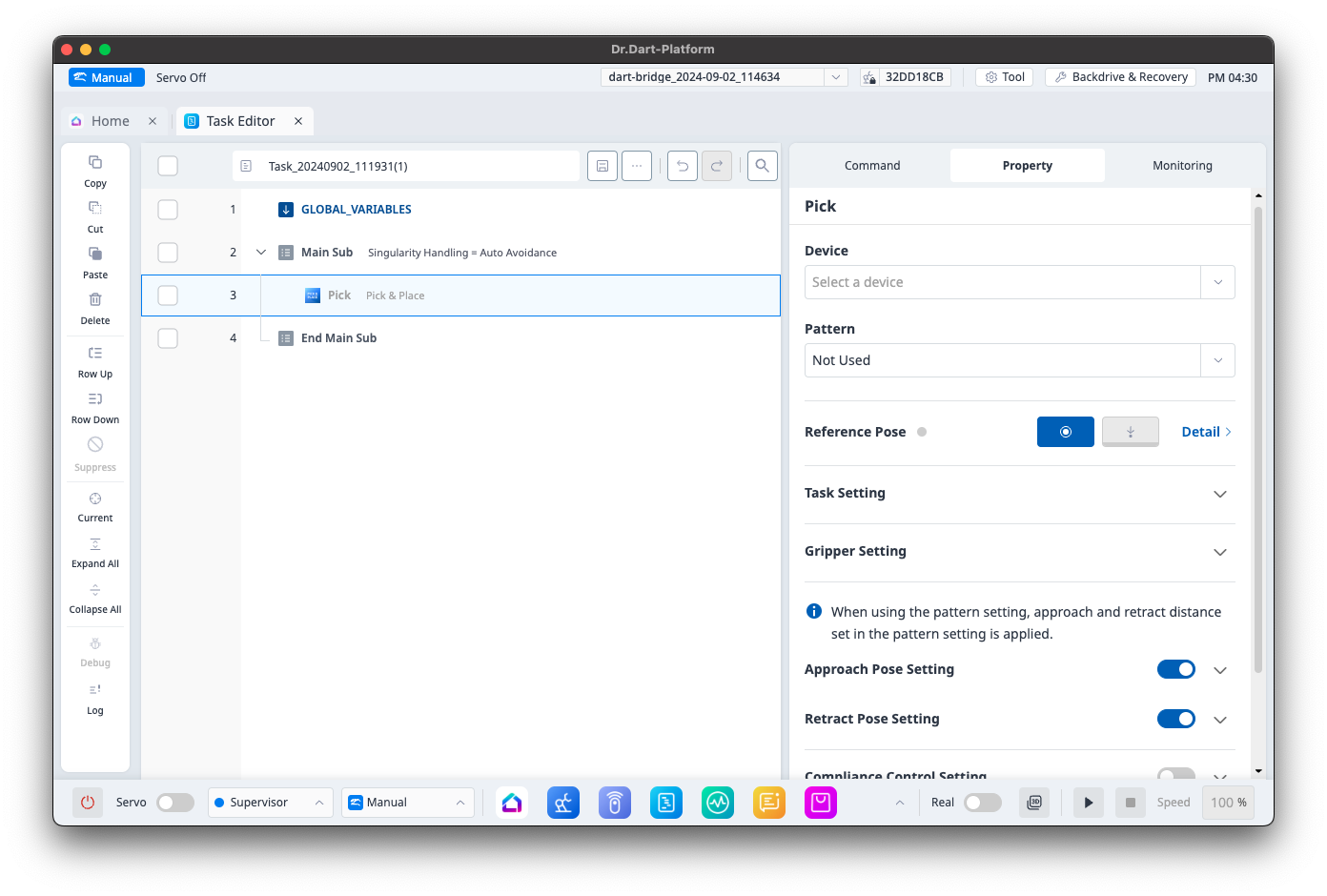
Pick
항목
|
기능
|
|
|---|---|---|
|
1 |
기계 |
디바이스를 설정할 수 있습니다. |
|
2 |
패턴 |
패턴을 설정할 수 있습니다. |
|
3 |
기준 자세 |
기준 자세를 설정할 수 있습니다. |
|
4 |
태스크 설정 |
반복 조건, 태스크 속도 및 가속도를 설정할 수 있습니다. |
|
5 |
그리퍼 설정 |
그리퍼 정보를 설정할 수 있습니다. |
|
6 |
접근 자세 설정 |
접근 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
7 |
후퇴 자세 설정 |
후퇴 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
8 |
강성 제어 설정 |
강도를 설정할 수 있습니다. |
|
9 |
접촉 감지 설정 |
태스크 방향, 접촉 마진, 원하는 힘, 접촉 힘, 시간 초과, 오프셋 마진을 설정할 수 있습니다. |
Place
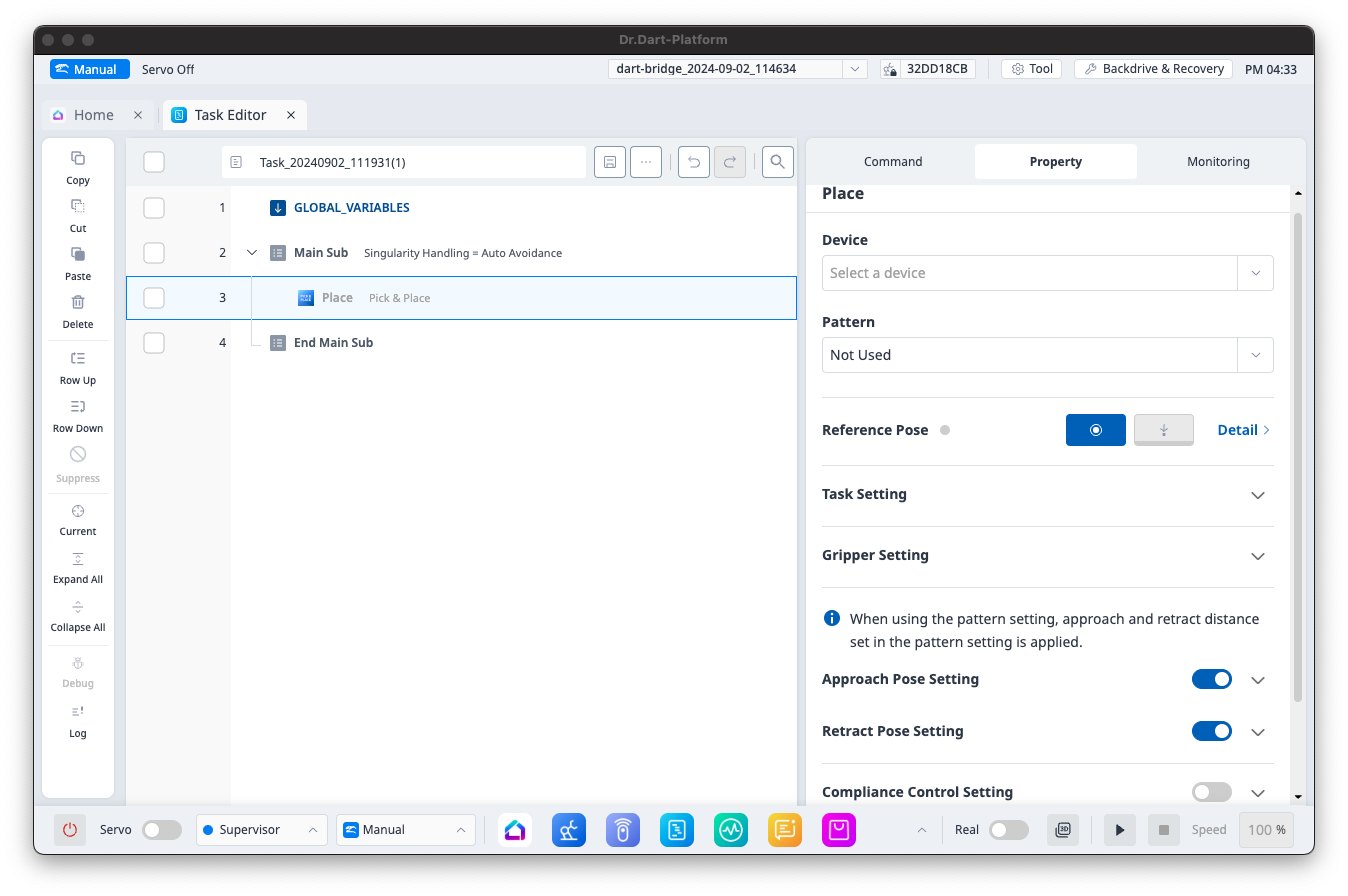
항목
|
기능
|
|
|---|---|---|
|
1 |
기계 |
디바이스를 설정할 수 있습니다. |
|
2 |
패턴 |
패턴을 설정할 수 있습니다. |
|
3 |
기준 자세 |
기준 자세를 설정할 수 있습니다. |
|
4 |
태스크 설정 |
반복 조건, 태스크 속도 및 가속도를 설정할 수 있습니다. |
|
5 |
그리퍼 설정 |
그리퍼 정보를 설정할 수 있습니다. |
|
6 |
접근 자세 설정 |
접근 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
7 |
후퇴 자세 설정 |
후퇴 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
8 |
강성 제어 설정 |
강도를 설정할 수 있습니다. |
|
9 |
접촉 감지 설정 |
태스크 방향, 접촉 마진, 원하는 힘, 접촉 힘, 시간 초과를 설정할 수 있습니다. |
Pick Bolt
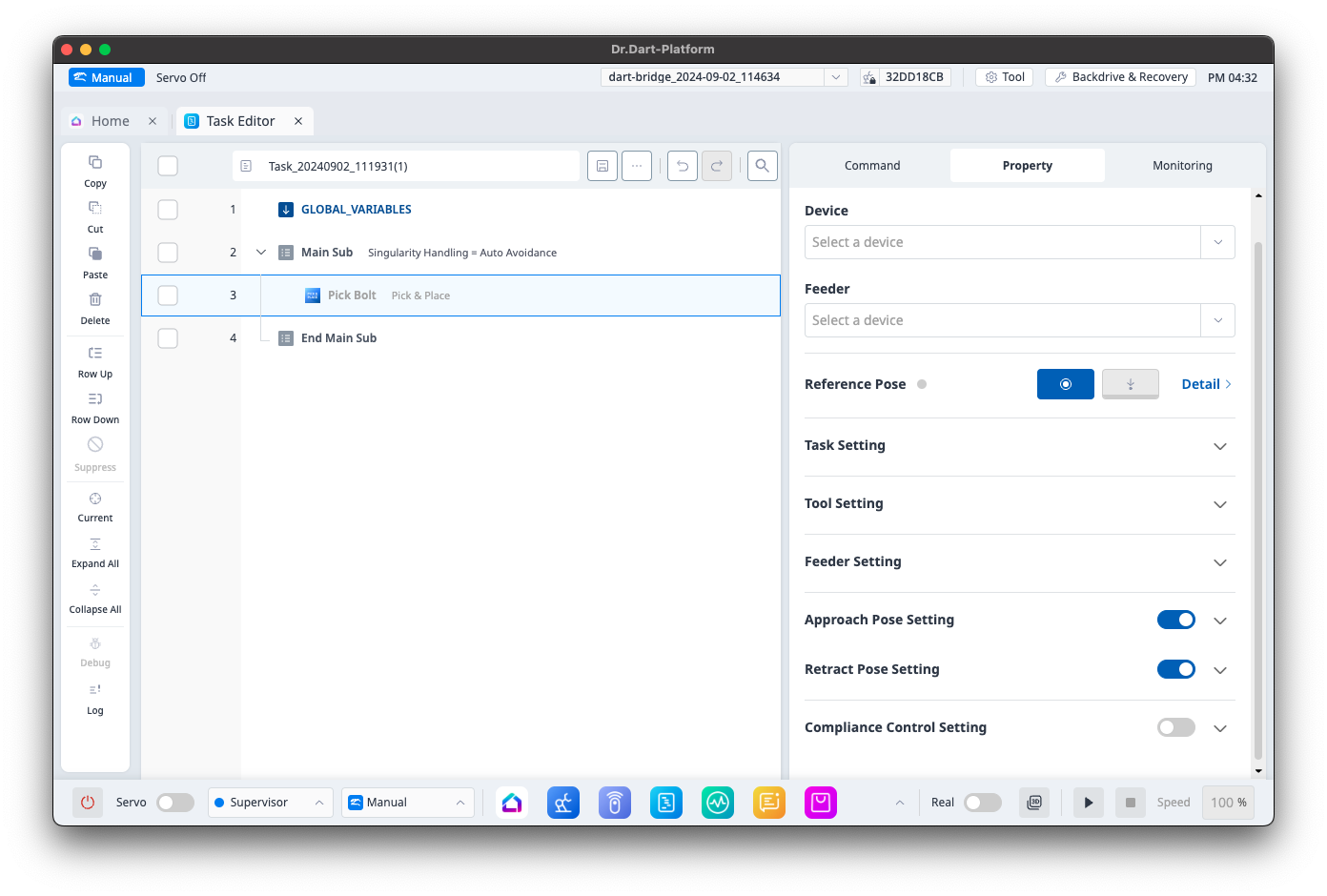
항목
|
기능
|
|
|---|---|---|
|
1 |
기계 |
디바이스를 선택할 수 있습니다. |
|
2 |
피더 |
피더를 선택할 수 있습니다. |
|
3 |
기준 자세 |
기준 자세를 설정할 수 있습니다. |
|
4 |
태스크 설정 |
태스크 속도와 가속도를 설정할 수 있습니다. |
|
5 |
툴 설정 |
툴 정보를 설정할 수 있습니다. |
|
6 |
피더 설정 |
볼트 준비 확인, 피더 유형, 확인 후 대기시간을 설정할 수 있습니다. |
|
7 |
접근 자세 설정 |
접근 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
8 |
후퇴 자세 설정 |
후퇴 거리, 속도, 가속도, 모션 시간, 블렌딩 반경을 설정할 수 있습니다. |
|
9 |
강성 제어 설정 |
강도를 설정할 수 있습니다. |