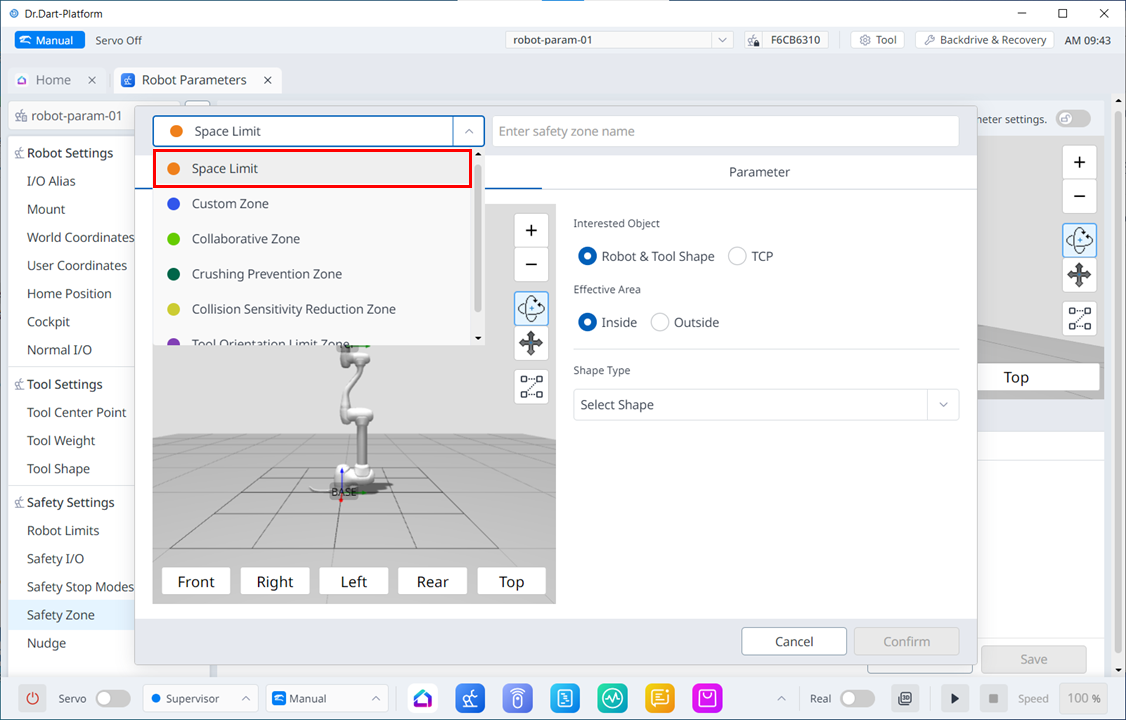
A Space Limit Workcell elem virtuális határt állít be a robot legkülső zónájában. A robot helykorlátok nélkül is működtethető, de a robot biztonságos működésének biztosítása érdekében ajánlott térkorlátokat beállítani.
A hely korlátja a Robot Parameters > Safety Settings > Safety Workspaces > Add New Workspace (Robot paraméterek > biztonsági beállítások > biztonsági munkaterületek > új munkaterület hozzáadása) bal felső részén található legördülő menüben érhető el, az alakzattípus alatt pedig a Sphere (gömb), Cylinder (henger), Cube (kocka), Diketted cuboid (döntött kocka) vagy polyhed
-
Az ellenőrzési pont beállítható robotként vagy TCP-ként, az érvényes hely pedig belső vagy külső lehet.
-
A megfigyelési zóna beállítható robotként vagy TCP-ként. Ez határozza meg, hogy érzékeli-e a belső vagy külső zónát, vagy sem.
-
Az alapértelmezett érték a teljes zóna és a beállított belső érték.
-
A robot a beállított biztonsági zónában való elhelyezése után megfelelően beállítható.
A robotra vonatkozó szóköz-korlát beállításához a biztonsági munkaterületek területen érintse meg az új munkaterület hozzáadása gombot, majd az alakzattípus csoportban válassza ki az alábbi típusok egyikét: Kocka, henger, többsíkú doboz, gömb, vagy döntött kocka. A beállítás és az engedélyezéshez biztonsági jelszó szükséges.