Mover layout do menu
|
|
Item |
Descrição |
|---|---|---|
|
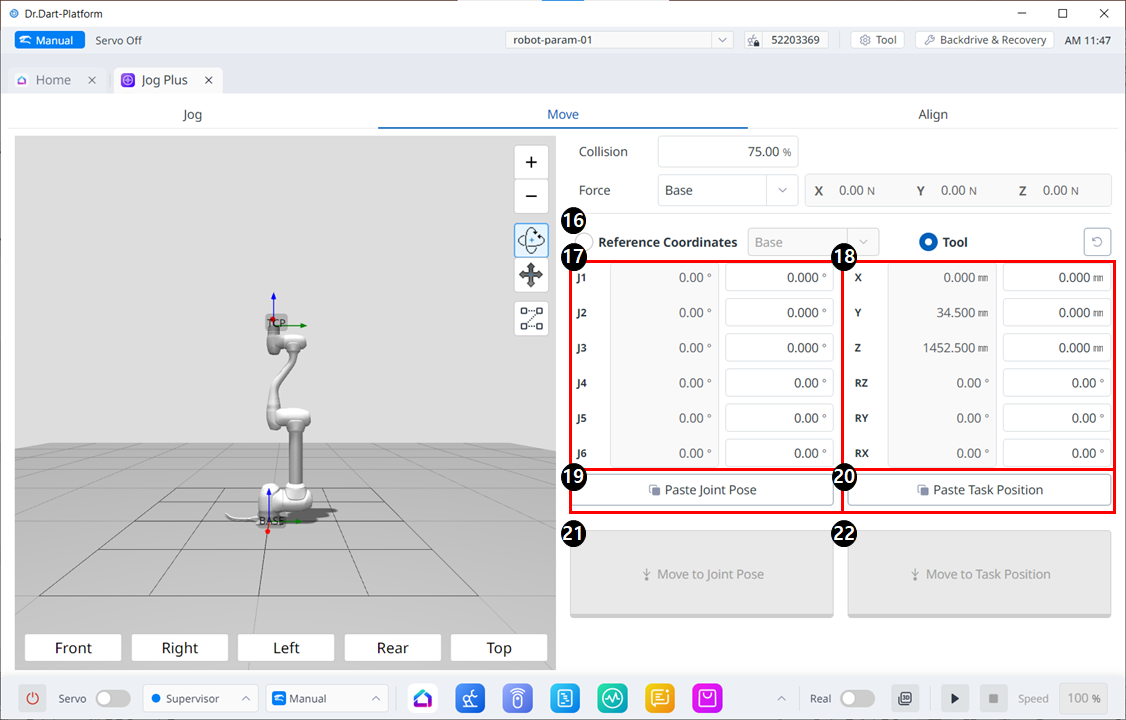
16 |
Reference Coordinates |
Selecione o sistema de coordenadas de referência a ser usado para as coordenadas da tarefa na Figura 18. Você pode escolher coordenadas Base, Mundial ou Usuário. |
|
17 |
Joint Posture |
Exibe a postura atual do robô e a postura articular alvo. |
|
18 |
Task Posture |
Exibe a postura atual do robô e a postura da tarefa alvo que se ajusta ao sistema de coordenadas de referência selecionado. |
|
19 |
Paste Joint Posture |
Cole o valor da postura copiado para a área de transferência no painel de postura articular. |
|
20 |
Paste Task Posture |
Cole o valor da postura copiado para a área de transferência no painel de postura da tarefa. |
|
21 |
Joint Move button |
Este botão faz com que o robô se mova para a postura articular alvo. |
|
22 |
Task Move button |
Este botão faz com que o robô se mova para a postura da tarefa alvo. |