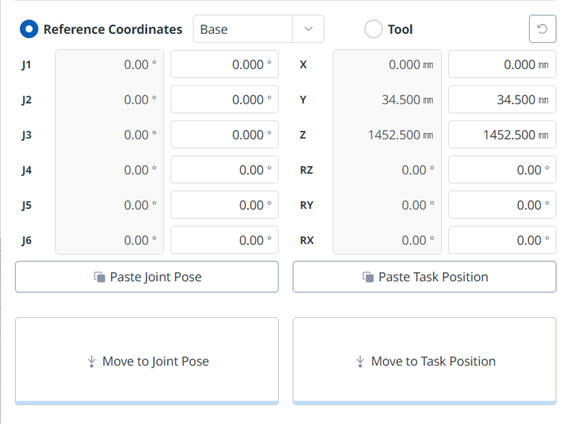
Para mover o robô com base em suas coordenadas básicas:
-
Selecione a guia Mover e selecione o item Coordenada de referência.
-
Selecione a coordenada de exibição como base.
-
Toque e segure o botão para mover para a posição de tarefa correspondente para mover para as coordenadas definidas.