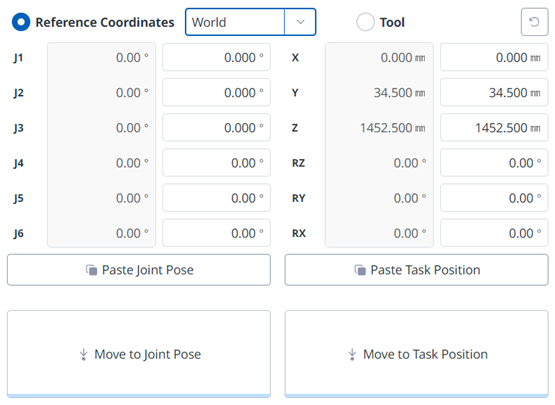
Para mover o robô com base nas Coordenadas Mundiais, siga estes passos:
-
Selecione a guia Mover e Coordenadas de referência.
-
Selecione Mundo como as coordenadas do visor e selecione o separador Mundo.
-
Configure a pose para mover com referência às Coordenadas Mundiais.
-
Toque sem soltar no botão Mover para posição correspondente para ir para as coordenadas definidas.