
Para mover o robô com base na ferramenta do robô, siga estes passos:
-
Selecione a ferramenta como sistema de coordenadas de referência.
-
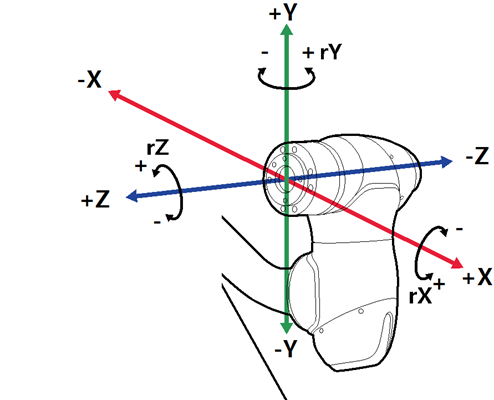
No painel de tarefas, selecione o eixo (X~RX) para o qual deseja ajustar o ângulo.
-
Pressione e segure um botão de direção (+,_) para mover o eixo correspondente.
-
A área de segurança não se aplica no modo virtual.
-
Rx, ry e RZ são executados de acordo com TCP (posição do centro da ferramenta).