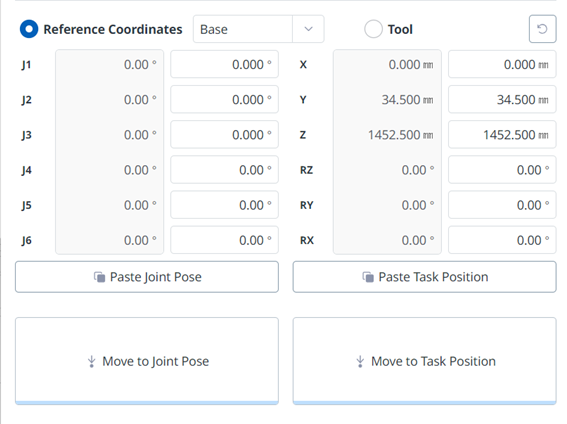
Para mover o robô em um ângulo específico, siga estes passos:
-
Selecione a guia Mover
-
Introduza o ângulo alvo da junta do robô.
-
Ative o Modo Real.
-
Toque e mantenha premido o botão Mover para a posição correspondente para ajustar o ângulo da junta do robot.