O utilizador pode selecionar um método de movimento manual a partir do separador Jog.
-
Jog: NL35 Ele move a junta do robô ou TCP para o eixo da articulação ou eixo de coordenadas que o usuário selecionou
-
Mover: Ele move a junção do robô ou TCP para o ponto-alvo que o usuário inseriu
O movimento do robô consiste em dois tipos.
-
Movimento conjunto: Move cada junta linearmente com um movimento rotativo
-
Movimento Tarefa: Ele move o final linearmente para o ponto alvo
O seguinte é o método de como mover o robô usando o movimento articular da tela de jog:
-
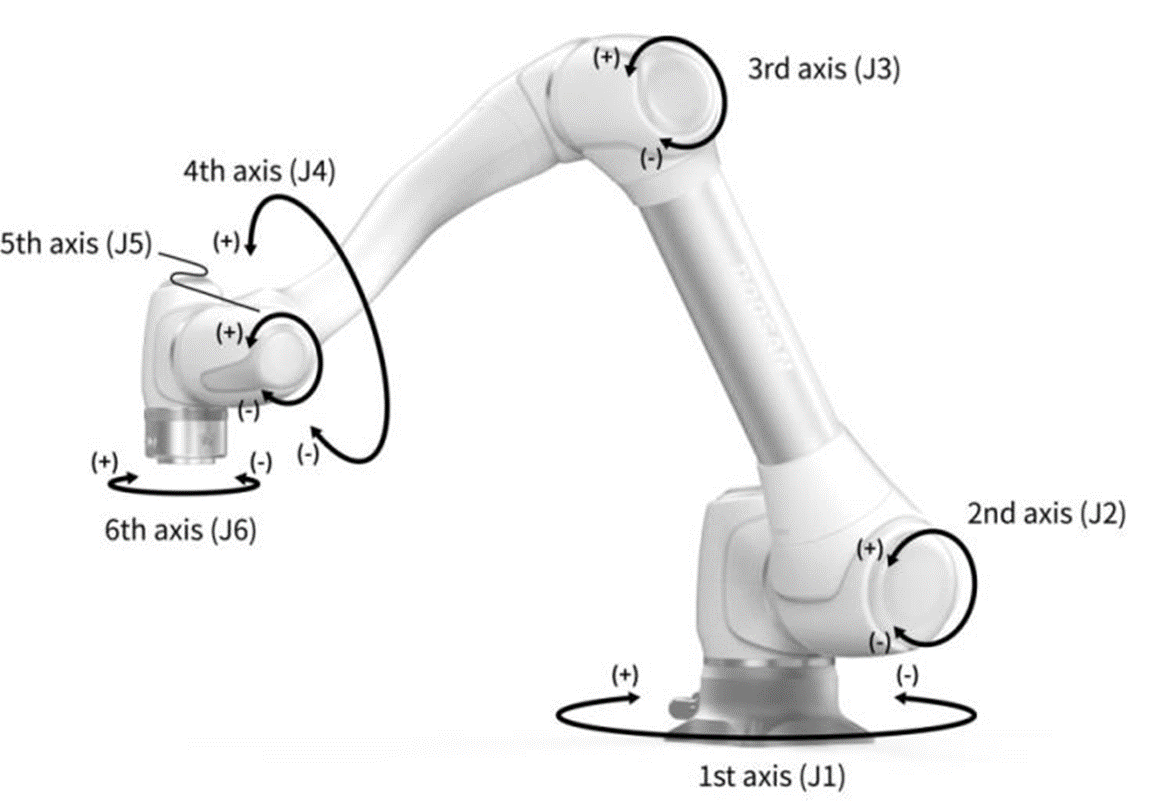
Selecione o separador Joint (Junta).
-
Selecione o eixo a mover. Por exemplo, você pode selecionar J1.
-
Prima o botão/- para mover o robot. O robô se move enquanto o botão/- é pressionado e a localização atual é exibida na tela em tempo real.
O seguinte é o método para mover o robô usando o movimento de tarefa na tela de jog:
-
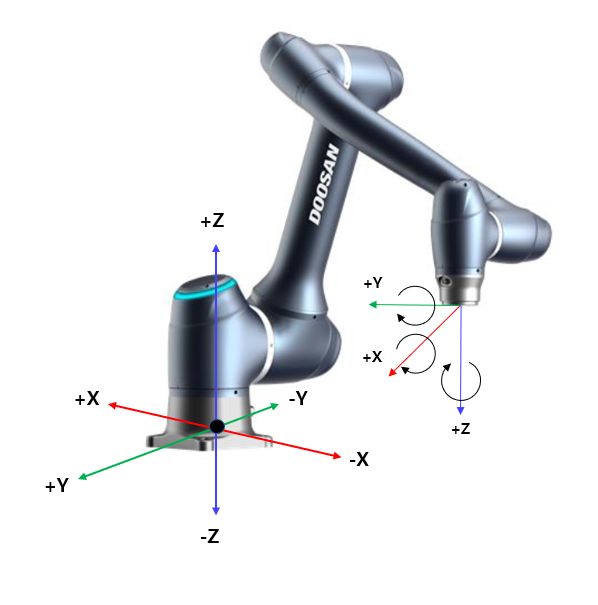
Selecione as coordenadas base. O robô pode ser movido de acordo com as coordenadas BASE ou as coordenadas DA FERRAMENTA.
-
Selecione a direção a mover. Por exemplo, o eixo X pode ser selecionado.
-
Prima o botão/- para mover o robot. O robô se move enquanto o botão/- é pressionado e a localização atual é exibida na tela em tempo real.
Para obter mais informações sobre o movimento da corrida, mover e alinhar, consulte (3.2.0-pt_PT) Ecrã Joga , e (3.2.0-pt_PT) Mover ecrã , respetivamente.
-
Se o interrutor de alternância do modo real no canto superior esquerdo da tela de jog estiver desligado, o robô se moverá apenas na tela virtual à esquerda da tela de jog. O robô real se move se o interrutor de alternância de modo real estiver ligado.
Com o módulo Jog Plus, o usuário pode explorar todo o espaço de trabalho no modo manual ou definir o espaço de operação como o espaço de operação do robô. O ângulo de movimento de cada eixo pode ser limitado de acordo com o espaço de operação selecionado e o limite de ângulo da junta da configuração de segurança.
Para utilizar a função Jog Plus, toque no módulo Jog Plus no menu principal.
-
A função Jog não pode ser utilizada durante o Servo Off.
-
O robô é operado manualmente na tela Jog Plus, de modo que o robô só se move quando o botão Jog é pressionado.
-
É possível mover o robot com base na posição atual no ecrã do separador Jog Plus.
-
O robô pode ser movido configurando o ângulo alvo/coordenadas na tela Mover guia.
-
É possível configurar as coordenadas de referência no ecrã do separador Jog Plus e mover o ecrã do separador como uma tarefa ou conjunto.
-
Se o robô não puder ser navegado devido a estar localizado em um espaço diferente do espaço de operação do modo Jog Plus, defina o espaço de operação do robô para "Nenhum"para permitir que o robô seja navegado.
Este módulo não está disponível no modo Auto. Tocar no botão de alternância na parte inferior direita torna-o disponível no modo Manual.
O uso do Job Plus permite que você use o recurso jog simultaneamente enquanto realiza trabalhos diferentes. Isto pode ser utilizado quando é necessário um controlo manual para mover o robot para o ponto-alvo durante o ensino.
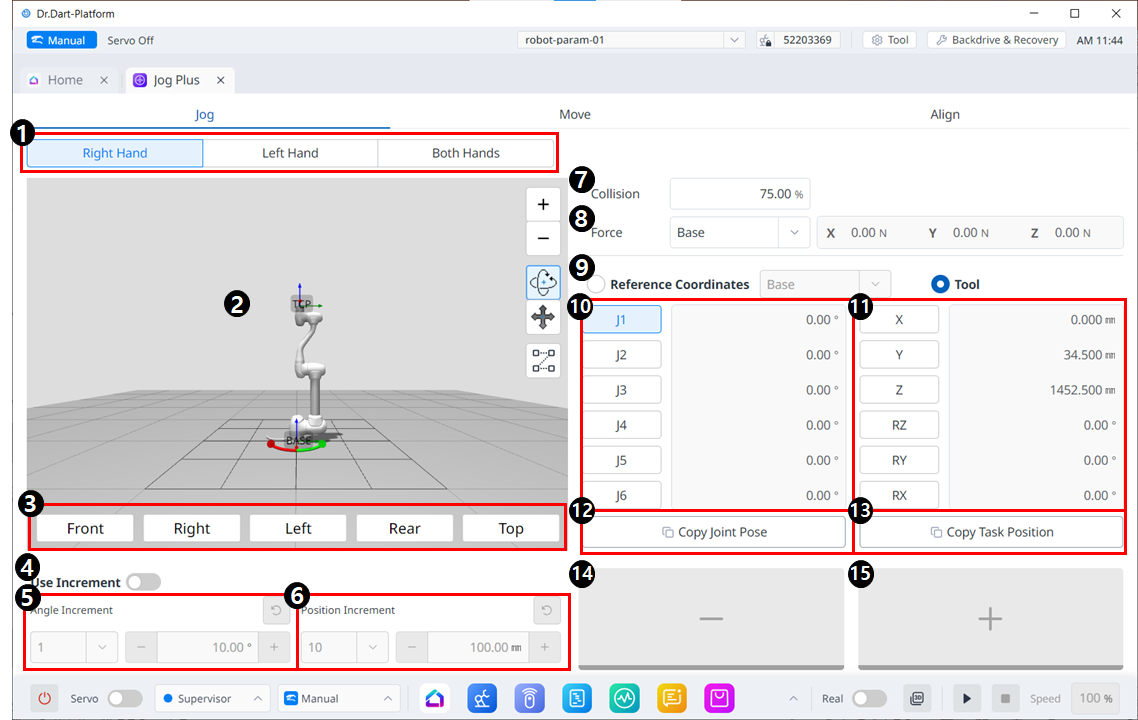
Layout do menu de corrida
|
|
Item |
Descrição |
|---|---|---|
|
1 |
Selecione o tipo de painel |
Você pode escolher a localização do botão mover. |
|
2 |
Simulação 3D |
Este é o visualizador 3D, onde você pode ver a aparência do robô. |
|
3 |
Alinhamento do Simulador |
Você pode utilizar esta seção para dirigir o simulador. |
|
4 |
Usar incremento |
Este botão permite ativar incrementos de ângulo ou posição. |
|
5 |
Incremento de ângulo |
Esta seção é onde o incremento do ângulo no eixo selecionado é definido. |
|
6 |
Incremento de posição |
Esta seção é onde o incremento de posição no eixo selecionado é definido. |
|
7 |
Colisão |
Este campo é onde você define a Colisão do Robô. |
|
8 |
Monitoramento de Força |
Esta seção é onde você define as forças nos eixos X, Y e Z com base em Base, Ferramenta, Mundo, Referência e entre outros. |
|
9 |
Selecione o sistema de coordenadas de referência |
Selecione um sistema de coordenadas de referência para exibir ou movimentar as coordenadas da tarefa na Figura 11. Podem ser coordenadas de Base, Mundial ou do Usuário. |
|
10 |
Painel conjunto |
Você pode selecionar o eixo da junta a ser deslocado. |
|
11 |
painel de tarefas |
Você pode selecionar o eixo de tarefa para movimentar. |
|
12 |
Botão Copiar Pose J |
Este botão permite copiar Pose J. |
|
13 |
Botão Copiar Pose X |
Este botão permite copiar Pose X. |
|
14 |
Mover - Botão |
Você pode fazer com que o robô se mova na direção - com base em cada eixo. Neste momento, você pode descobrir a direção de - e + na simulação 3D no lado esquerdo. |
|
15 |
Mover + Botão |
Você pode fazer com que o robô se mova na direção + com base em cada eixo. Neste momento, você pode descobrir a direção de - e + na simulação 3D no lado esquerdo. |
Mover
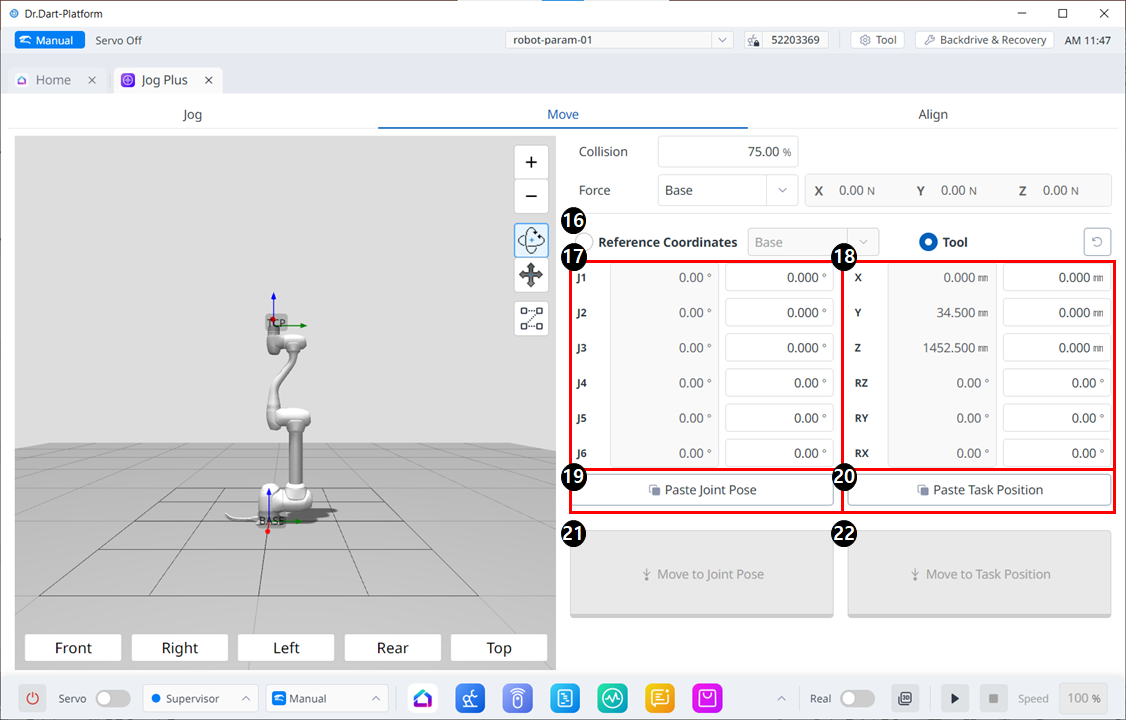
Mover layout do menu
|
|
Item |
Descrição |
|---|---|---|
|
16 |
Reference Coordinates |
Selecione o sistema de coordenadas de referência a ser usado para as coordenadas da tarefa na Figura 18. Você pode escolher coordenadas Base, Mundial ou Usuário. |
|
17 |
Joint Posture |
Exibe a postura atual do robô e a postura articular alvo. |
|
18 |
Task Posture |
Exibe a postura atual do robô e a postura da tarefa alvo que se ajusta ao sistema de coordenadas de referência selecionado. |
|
19 |
Paste Joint Posture |
Cole o valor da postura copiado para a área de transferência no painel de postura articular. |
|
20 |
Paste Task Posture |
Cole o valor da postura copiado para a área de transferência no painel de postura da tarefa. |
|
21 |
Joint Move button |
Este botão faz com que o robô se mova para a postura articular alvo. |
|
22 |
Task Move button |
Este botão faz com que o robô se mova para a postura da tarefa alvo. |