Menu Alinhar
|
|
Item |
Description |
|---|---|---|
|
1 |
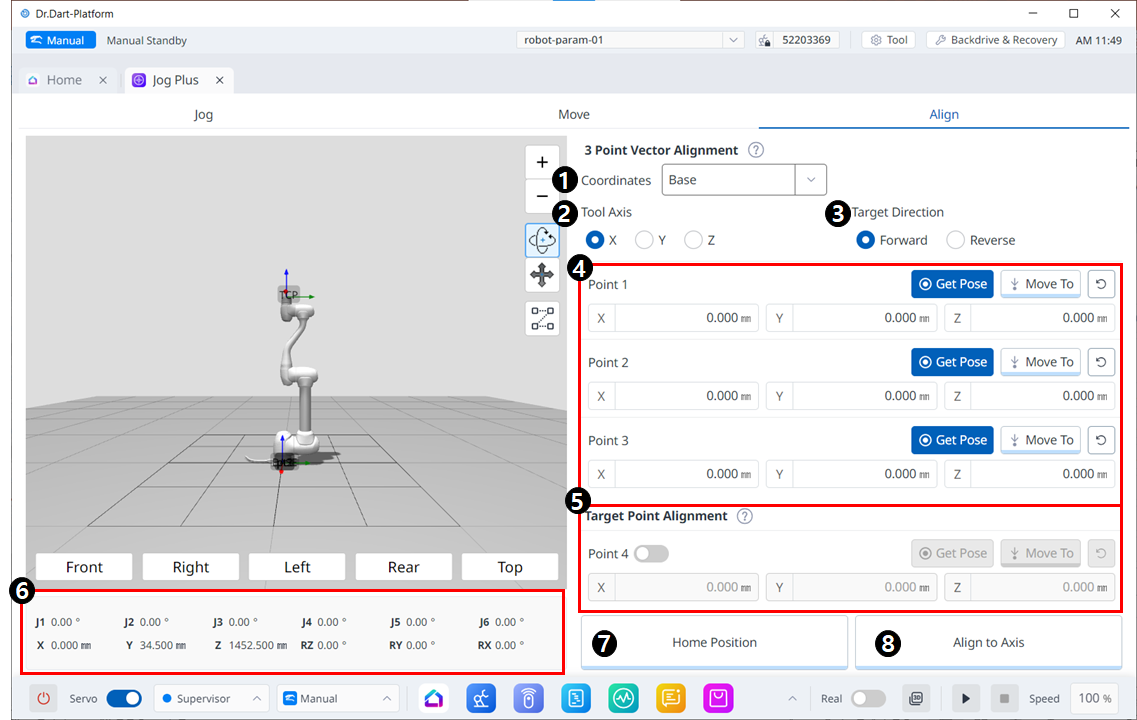
Coordinates |
Selecione o sistema de coordenadas de referência para as posições nas Figuras 4 e 5. |
|
2 |
Tool Axis |
Selecione qual eixo do TCP alinhar. |
|
3 |
Target direction |
Selecione a direção para frente/para trás |
|
4 |
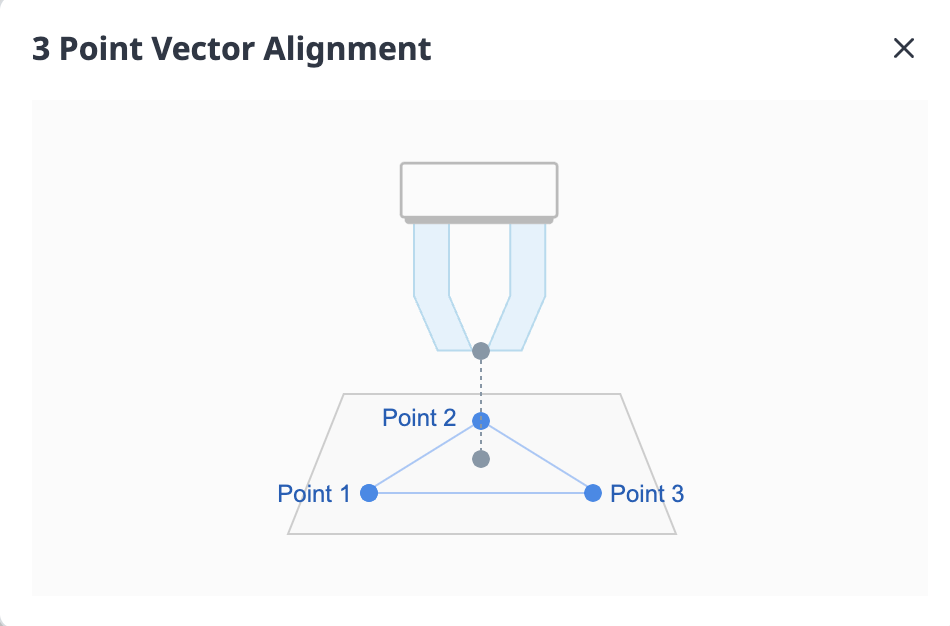
Pick points on a plane |
Escolha três pontos para definir o plano. As definições são as seguintes: |
|
5 |
Target Point Alignment |
Selecione um ponto para colocar o TCP. Isto é opcional e se estiver desmarcado, apenas a orientação será classificada a partir da localização atual. |
|
6 |
Robot Posture |
Exibe a postura conjunta e a postura da tarefa do robô atual. Para postura de tarefa, segue o sistema de coordenadas de referência selecionado na Figura 1. |
|
7 |
Home Position |
Quando você clica no botão, ele se move para a posição inicial. |
|
8 |
Align to Axis |
Quando você clica no botão, ele começa. |