A robot szerszám koordinátái alapján történő mozgatásához kövesse az alábbi lépéseket:
-
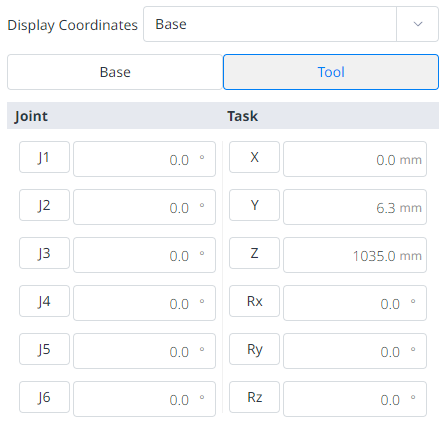
Válassza ki az Áthelyezés lapot, és válassza a feladat lapot.
-
Válassza az eszköz fület.
-
Állítsa be a pózt úgy, hogy mozogjon az eszközre való hivatkozással.
-
Érintse meg és tartsa lenyomva a Move to megfelelő Pose (mozgás a megfelelő pózhoz) gombot a beállított koordinátákra való továbblépéshez.