Opcionális NORMÁL 5 perc
A sub a subrutine rövidítése. A szubrutin olyan folyamatra utal, amely minimalizálja a program lépéseinek számát azáltal, hogy felhívja a szükséges részeket, ha két vagy több ismétlődő rész van jelen.
-
A Doosan Robotics robotok CallSub parancsot adnak az alparancsok és a megfelelő albekezdés hívására.
-
Az alparancs a Pythonban meghatározott módon működik.
-
Az albekezdést hozzá kell adni a főbekezdéshez, a főbekezdés kezdetéhez és az EndMainSub-hoz, a főbekezdés végéhez.
-
Az ismétlés mellett az alparancs a főbekezdés egyszerűsítésére is szolgál. Az alparancs használatával intuitív módon azonosíthatja, hogy a főbekezdés melyik feladatát végzi jelenleg.
-
Az alparancs használata lehetővé teszi az albekezdésegység tesztelését.
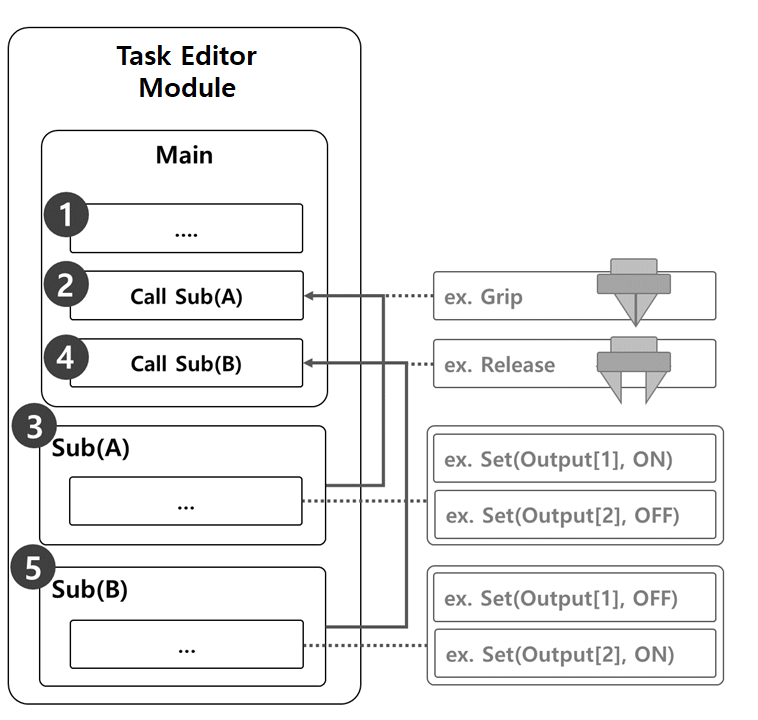
A minta, ahol egy alparancsot használnak a robot megfogója megfogási és kioldási mozgásának végrehajtására, a következőkből áll.
-
A főbekezdés sorai az első sortól kezdve sorrendben hajtják végre a feladatprogramot.
-
Lépjen a Call Sub (A) által hívott Sub(A)-ra.MintaProgram: Hívja a Grip subrutinot.Robot: Nincs mozgás.
-
Az A) pont végrehajtása. Minden albekezdéssor végrehajtása sorrendben történik, visszatér a főbekezdéshez, és végrehajtja a következő sort.MintaProgram: Végezze el a Grip szubrutinszerű vonalait egymást követő sorrendben. A Set (Beállítás) paranccsal ÁLLÍTSA A Output (kimenet) [1] (BE), a Output (kimenet) [2] (kimenet) értékét OFF (ki) értékre.Robot: A robotfogó a markolat mozgását hajtja végre.
-
Lépjen a Call Sub (B) által hívott Sub (hívás Sub).MintaProgram: Hívja a Release Subroutine-t.Robot: Nincs mozgás.
-
B) végrehajtják. Minden albekezdéssor végrehajtása sorrendben történik, visszatér a főbekezdéshez, és végrehajtja a következő sort.MintaProgram: Végezze el a Grip szubrutinszerű vonalait egymást követő sorrendben. A SET paranccsal állítsa a kimenet [1] ki, a kimenet [2] PEDIG BE értékre.Robot: A robot megfogója végrehajtja a kioldási mozgást.
Add alparancs
-
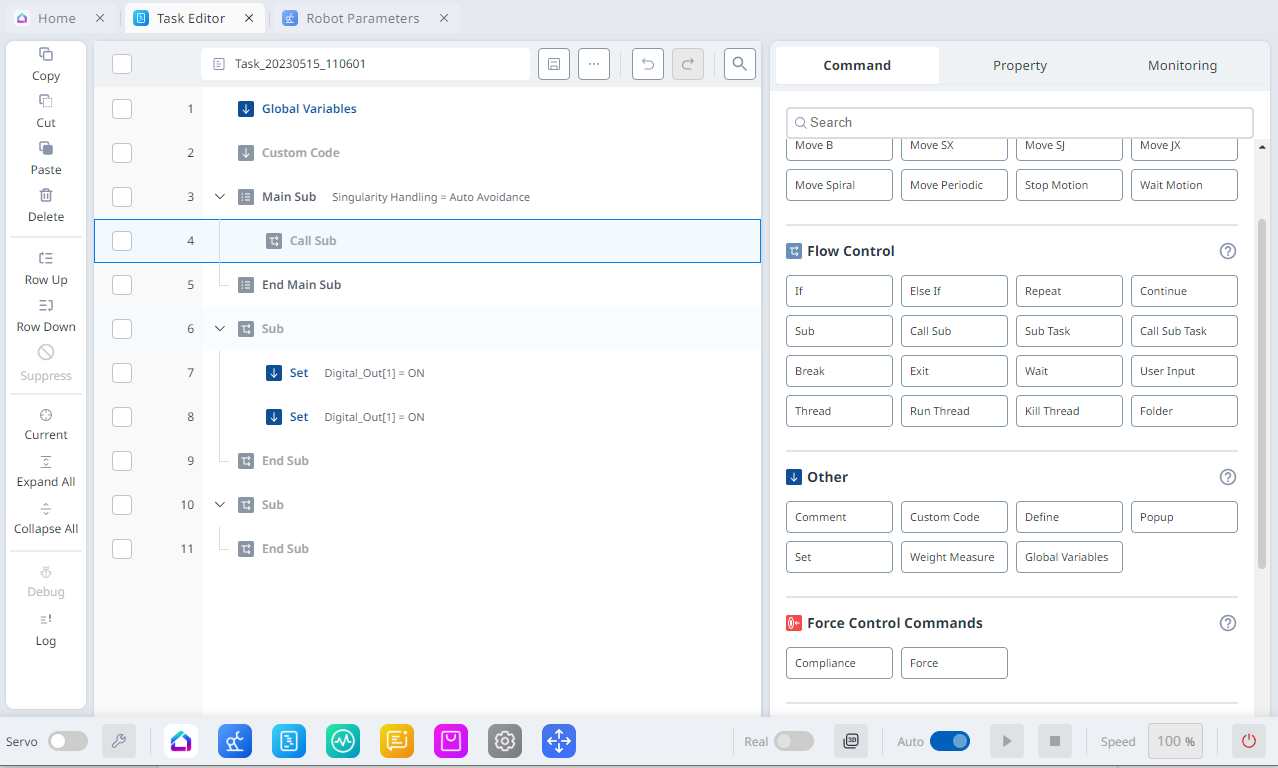
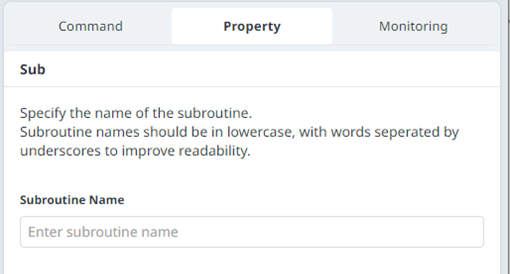
A Feladatszerkesztő modulban a jobb oldali parancs menü Áramlásvezérlés része alatt adjon hozzá egy alparancsot.
-
Adja meg a szubrutinnevet.
Add CallSub parancs
-
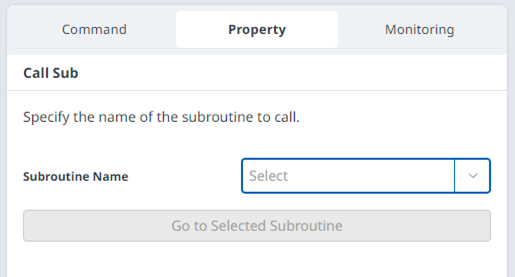
A Feladatszerkesztő modulban a jobb oldali parancs menü Áramlásvezérlés része alatt adjon hozzá egy Hívásalparancsot.
-
Válassza ki a Sub paranccsal regisztrált szubrutinnevet.
-
Ha a sorok száma növekszik a feladatprogramban, akkor nehézzé válhat a szubrutinok megtalálása. Ebben az esetben érintse meg az Ugrás a kijelölt alrutinhoz elemet a CallSub tulajdonságának parancsában, hogy a fókuszt a megfelelő alparancssorra vigye.