월드 좌표를 기준으로 로봇을 이동하려면:
-
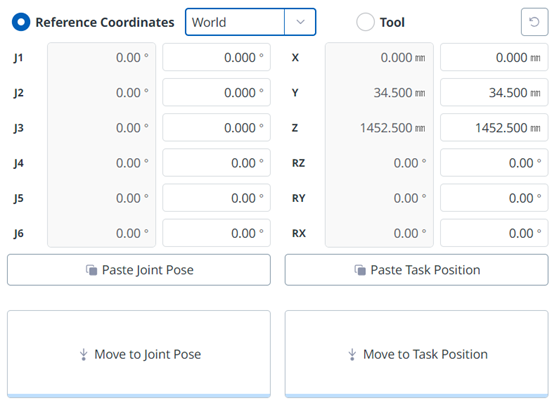
이동 탭을 선택한 후 참조 좌표계 항목을 선택하십시오.
-
표시 좌표계를 월드로 선택하십시오
-
이동하고자 하는 포즈를 월드 기준으로 설정하십시오.
-
해당 태스크 포지션으로 이동 버튼을 길게 탭 해 설정한 좌표로 이동하십시오
월드 좌표를 기준으로 로봇을 이동하려면:
이동 탭을 선택한 후 참조 좌표계 항목을 선택하십시오.
표시 좌표계를 월드로 선택하십시오
이동하고자 하는 포즈를 월드 기준으로 설정하십시오.
해당 태스크 포지션으로 이동 버튼을 길게 탭 해 설정한 좌표로 이동하십시오