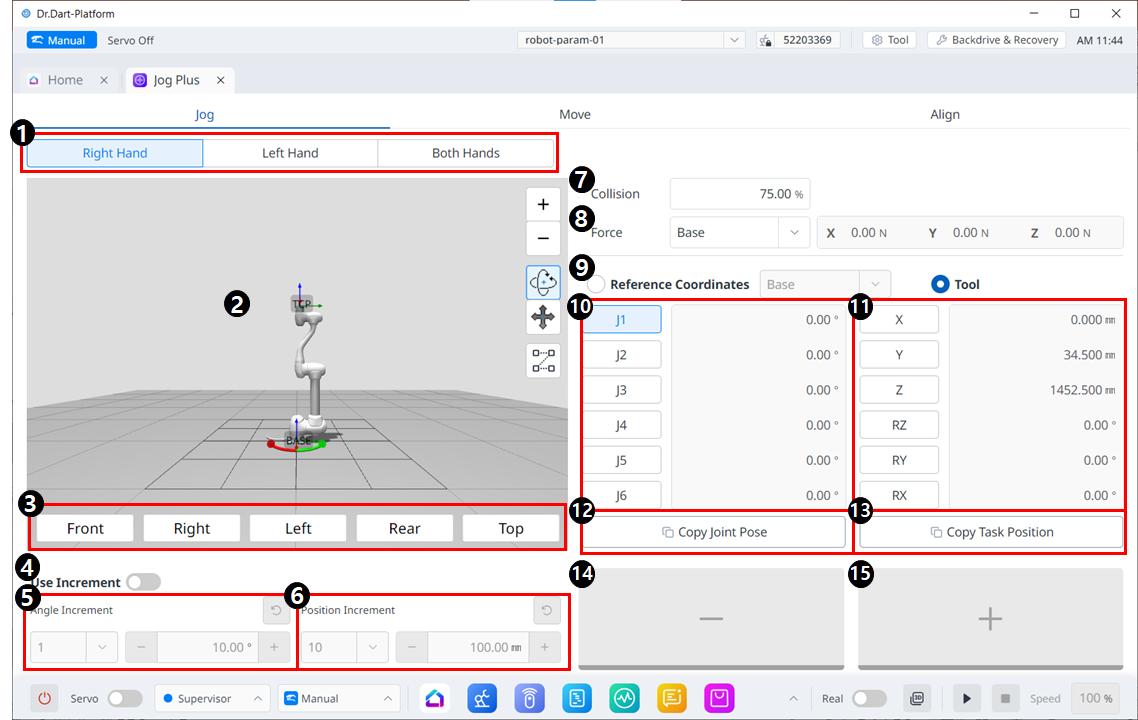
Jog 메뉴 구성
|
|
항목 |
설명 |
|---|---|---|
|
1 |
패널 타입 선택 |
동작 버튼의 위치를 선택 할 수 있습니다. |
|
2 |
3D simulation |
3D 뷰어에서 로봇의 모습을 보여줍니다. |
|
3 |
Simulator Alignment |
시뮬레이터의 정렬 방법 항목입니다. |
|
4 |
Use Increment |
각도 혹은 위치 increment의 활성화 버튼입니다. |
|
5 |
Angle Increment |
선택한 축에서의 각도 Increment를 설정할 수 있습니다. |
|
6 |
Position Increment |
선택한 축에서의 위치 Increment를 설정할 수 있습니다. |
|
7 |
Collision |
로봇 충돌을 설정할 수 있습니다. |
|
8 |
Force Monitoring |
Base, Tool, World, Reference 등을 기준으로 X, Y, Z축의 힘을 설정할 수 있습니다. |
|
9 |
기준 좌표계 선택 |
11번의 Task 좌표를 표시하거나 jog할 기준 좌표계를 선택합니다. Base, World, User coordinate를 선택할 수 있습니다. |
|
10 |
조인트 패널 |
Jog할 Joint축을 선택할 수 있습니다. |
|
11 |
태스크 패널 |
Jog할 Task 축을 선택할 수 있습니다. |
|
12 |
Copy Pose J button |
Pose J를 복사합니다. |
|
13 |
Copy Pose X button |
Pose X를 복사합니다. |
|
14 |
Move - Button |
각 축을 기준으로 하여 - 방향으로 움직입니다. 이때 왼쪽의 3D simulation에서 -와 +의 방향을 파악할 수 있습니다. |
|
15 |
Move + Button |
각 축을 기준으로 하여 + 방향으로 움직입니다. 이때 왼쪽의 3D simulation에서 -와 +의 방향을 파악할 수 있습니다. |