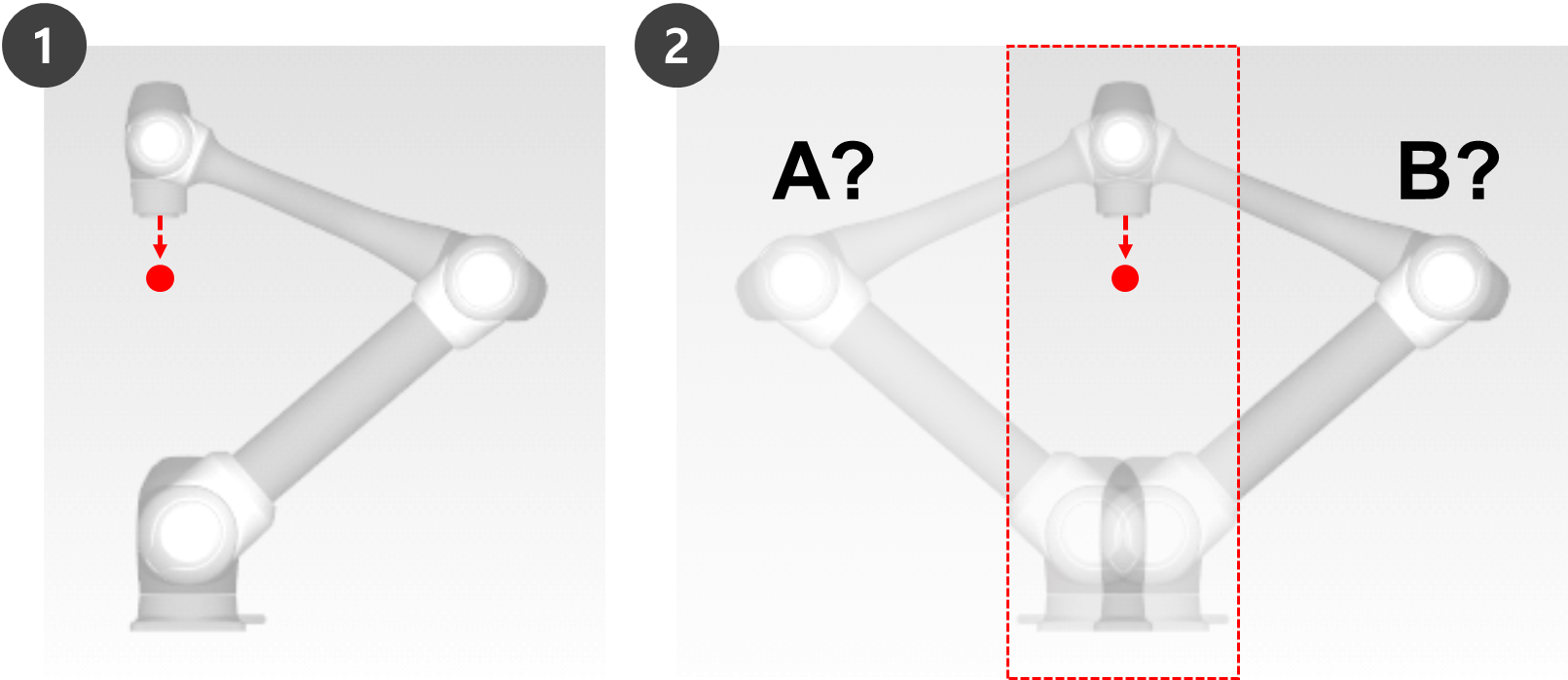
A szingularitás a többcsatlakozós robotban olyan pozícióra (vagy pontra) utal, ahol a robot nehezen tudja kiszámítani a következő pozícióját mozgás közben. A többcsatlakozós robotok a robot vége alapján kiszámítják a mozgás során az egyes illesztési szögeket
Például a Fig. 1 lent, amikor a robot a piros pontra mozog, a robot nem tudja meghatározni, hogy az ízületeit az A vagy B pózhoz mozgassa, ahogy az ábrán látható. 2. Ezt a pozíciót (vagy pontot) szingularitásnak nevezzük.
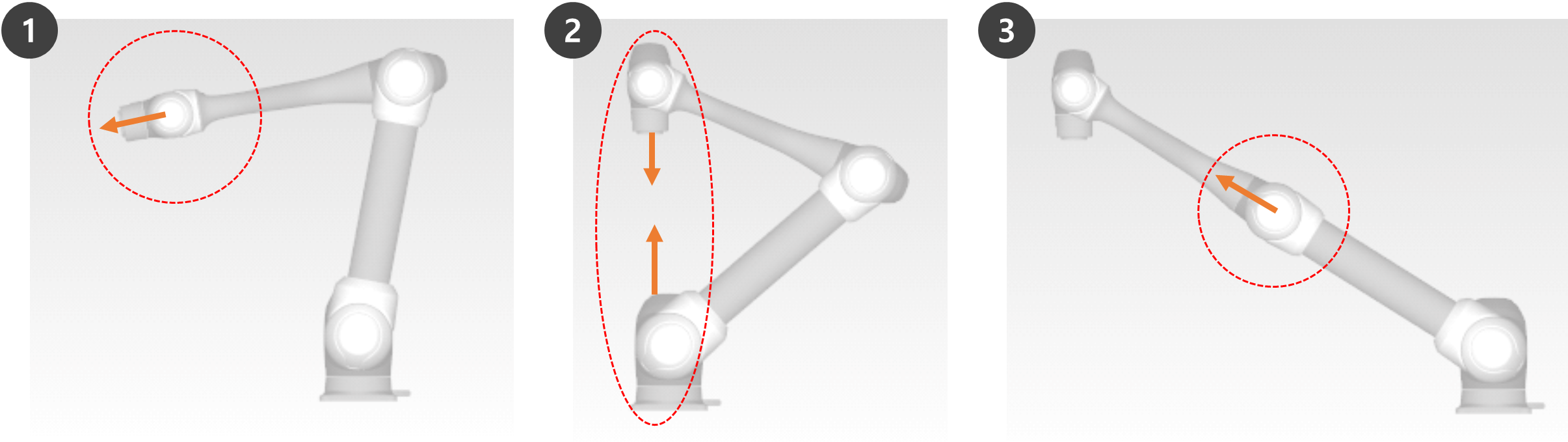
A szingularitás közelében a robot mozgása sík, pont és vonal szempontjából nem folyékony, a robot végének lineáris mozgása nem tartható fenn, és a vezérlés során a pozícióhiba növekedhet. A szingularitás három esetben fordul elő az alábbi ábrán látható módon, beleértve azt is, amikor a robot illesztése vonalat alkot.
-
Csukló szingularitás: Amikor a robot csuklója vonalat alkot, a 5. Tengely közeledik a 0°-hoz
-
Az emberi karhoz képest a 4., 5. És 6. Tengely a csuklónak felel meg.
-
-
Váll szingularitás: Ha a 1. És 6. Tengely ugyanazon a vonalon vanAz emberi karhoz képest a 1. És 2. Tengely a vállízületnek felel meg.
-
Könyök szingularitás: Amikor a robot vonalat alkot, a 3. Tengely közeledik a 0°-hozAz emberi karhoz képest a 3. Tengely a könyökének felel meg.
-
A kézi és automatikus műveleteket, amelyek együttes forgással mozognak, nem befolyásolja a szingularitás.
-
Feladat mozgás, MoveL parancs, stb.
-
-
A szingularitás csak kézi és automatikus működés közben fordul elő, amikor a robot befejezi a lineáris mozgást.
Közös mozgás, MoveJ parancsok, stb. -
A szingularitás zónában az erőszabályozás vagy a megfelelőség-ellenőrzés nem érhető el.
-
Mivel bizonyos tengelyek forgási sebessége gyorsan növekszik, amikor egy lineáris mozgás áthalad egy szingularitáson, lehetséges, hogy az egyesített sebességhatár megsértése vagy az egyesített szöghatár megsértése következik be.
Hogyan kerüljük el a szingularitást
A Doosan Robotics robotok lehetőséget kínálnak a szingularitások elkerülésére a mozgásvezérlés során. Azonban ajánlott olyan feladatot konfigurálni, amely nem hoz létre kivételeket közös mozgási parancsok, például a MoveJ használatával szingularitási zónákban.