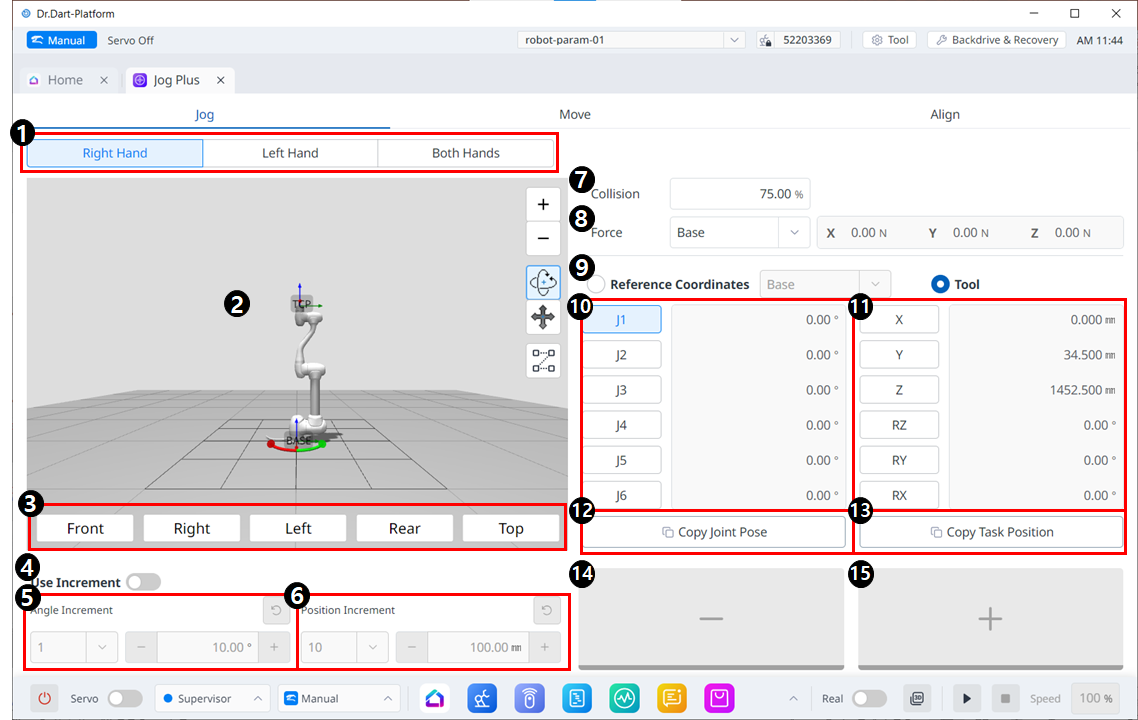
导航菜单布局
|
|
物品 |
描述 |
|---|---|---|
|
1 |
选择面板类型 |
您可以选择移动按钮的位置。 |
|
2 |
3D模拟 |
这是 3D 查看器,您可以在其中看到机器人的外观。 |
|
3 |
模拟器对准 |
您可以利用此部分来操纵模拟器。 |
|
4 |
使用增量 |
此按钮允许您启用角度或位置增量。 |
|
5 |
角度增量 |
此部分是设置所选轴上的角度增量的位置。 |
|
6 |
持仓增量 |
此部分是设置所选轴上的位置增量的位置。 |
|
7 |
碰撞 |
该字段是您设置机器人碰撞的地方。 |
|
8 |
力监测 |
在此部分中,您可以根据基础、工具、世界、参考等设置 X、Y 和 Z 轴上的力。 |
|
9 |
选择参考坐标系 |
选择参考坐标系来显示或点动图 11 中的任务坐标。它可以是基础坐标、世界坐标或用户坐标。 |
|
10 |
接缝板 |
您可以选择要点动的关节轴。 |
|
11 |
任务面板 |
您可以选择要点动的任务轴。 |
|
12 |
复制姿势 J 按钮 |
此按钮允许您复制姿势 J。 |
|
13 |
复制姿势 X 按钮 |
此按钮允许您复制姿势 X。 |
|
14 |
移动 - 按钮 |
您可以让机器人根据每个轴向 - 方向移动。 此时,您可以在左侧的 3D 模拟中找出 - 和 + 的方向。 |
|
15 |
移动+按钮 |
您可以让机器人根据每个轴向 + 方向移动。 此时,您可以在左侧的 3D 模拟中找出 - 和 + 的方向。 |